基于滑模控制的车辆主动转向硬件在环实验分析1)
2020-10-28 08:16范浩洋李韶华王桂洋
力学与实践 2020年5期
范浩洋 李韶华 王桂洋
(石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄050043)(石家庄铁道大学机械工程学院,石家庄050043)
近年,重型汽车导致的交通事故占特大交通事故的比例越来越高,这给社会带来了巨大的经济损失[1],重大交通事故的频繁发生促使交通安全问题日益成为人们关注的焦点,因此提高重型汽车在道路上行驶的稳定性和安全性显得尤为重要。转向系统作为车辆的关键系统之一[2],其性能的优劣直接影响到车主驾驶过程中的稳定性甚至安全性,因此转向系统与车辆的操纵稳定性有着十分密切的关系[3-4]。
汽车转向系统是驾驶员按照自己的意愿控制汽车行驶方向的系统,传统的被动转向系统在低速行驶或泊车时存在转向灵敏性不足的情况,驾驶员需要大角度地转动转向盘;然而在高速行驶时转向过于灵敏,汽车的行驶稳定性和安全性大幅下降[5-6]。在行驶过程中,汽车还容易受到环境因素的干扰[7-8],比较容易产生导致危险的横摆角速度和侧向加速度。通过驾驶员的操作无法恰当地处理好车速与转向灵敏性之间的矛盾,而主动转向系统是在驾驶员操纵转角的基础上加以修正,可以很好地协调速度与转向灵敏性之间的问题[9]。
在提高行驶稳定性和安全性方面,动力转向系统是现代汽车的重要组成部分,该系统不仅较好地解决了转向轻便性和转向灵敏性之间的矛盾,还能提高行驶安全性和舒适性,根据动力源的特性,助力转向系统分为液压式和电动式两种类型[10]。电动式动力转向系统是近年出现的一种新型动力转向系统,具有节能、高效的特点[11]。
在主动转向方面,目前所应用的主动转向控制策略有:比例积分微分(proportion integration differentiation, PID) 控制[12]、纯跟踪控制[13]、预瞄跟踪最优控制[14]、滑模控制[15-18]等等。PID 控制器算法简单,但控制参数对车辆参数变化非常敏感,适应性差[19-20]。纯跟踪算法是基于车辆运动几何特性,不适合在低附着系数的路面上对高速行驶的车辆横向控制[21]。汽车在实际行驶中,参数和环境具有很大的不确定性[22],所以最优控制往往无法保持最优,滑模控制由于其自适应好及鲁棒性良好等一些优点被广泛采用。
本文分析了重型商用车的转向系统结构,运用滑模控制理论对该车辆建立了主动转向控制器,利用软件TruckSim–Simulink 进行联合仿真并完成硬件在环系统实验。实验结果验证了所设计的主动转向控制器可以有效地改善车辆的操纵稳定性。最后在此基础上进行了车速及路面附着系数对主动转向控制效果的敏感性分析。
1 车辆硬件在环转向系统
车辆选取某东风三轴商用汽车,该车的转向传动系统为电控液压助力转向系统,其在车辆行驶转向时具有助力大、转向路感平稳的优点,是机械液压助力转向系统衍生出来的升级强化转向助力系统,成本也相对较低[23]。图1 为电控液压助力转向系统示意图。
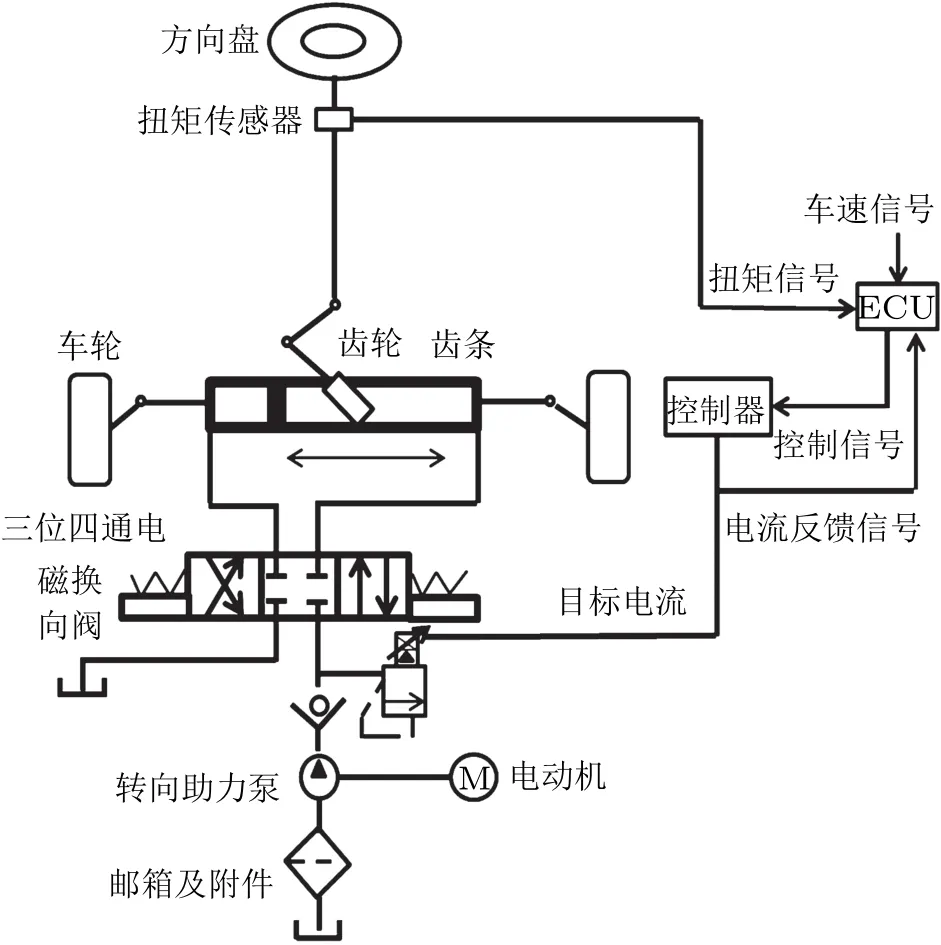
图1 电控液压助力转向系统示意图
在本实验室的硬件在环系统综合测试平台中可实现实车转向系统、制动系统以及传感器硬件在环实验模拟用于极限工况、非极限工况下操纵稳定性道路实验。图2 为硬件在环系统的实车转向传动装置。
2 车辆动力学模型
2.1 重型车辆简化模型建立
建立二自由度简化车辆模型,分析其操纵特性和转向特性。
车辆简化模型如图3 所示。忽略转向系统的影响,认为车辆只作平行于地面的平面运动,车辆中轴和车辆实际的后轴共同等效为一根后轴[24],车辆坐标系的原点与汽车质心位置重合。二自由度汽车运动微分方程为

图2 驾驶模拟器转向系统
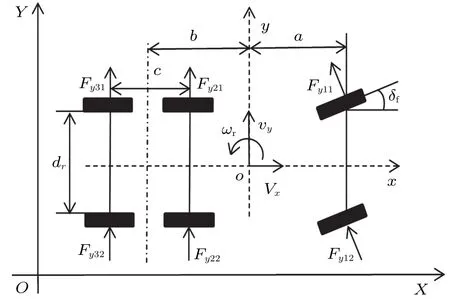
图3 车辆简化模型示意图
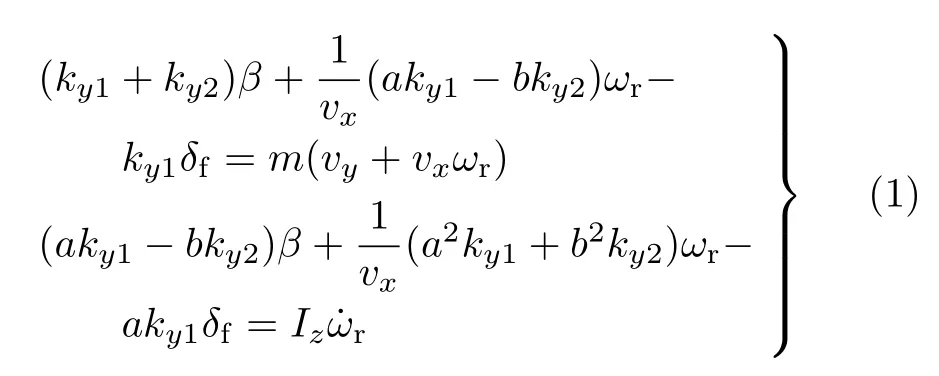
式中,δf为前轮转角,a为质心至前轴距离,b为质心至后轴距离,ωr为汽车的横摆角速度,Iz为车辆绕z轴的转动惯量,ky1为前轮侧偏刚度,ky2为后轮侧偏刚度,vx和vy分别为质心速度在车辆坐标系上ox轴和oy轴的分量。
2.2 整车车辆模型建立
车辆在实际运行的时候会受到不同路况以及不同驾驶员操作的影响,因此在TruckSim 中建立某东风三轴商用汽车的整车动力学模型,如图4 所示。
车辆的参数如表1 所示。

图4 TruckSim 整车模型

表1 车辆参数
3 主动转向控制器的设计
3.1 变传动比曲线设计
根据传动比随车速和方向盘转角的变化规律,综合考虑方向盘与车速进行变传动比曲线设计,传动比随车速与方向盘转角的变化关系为[25]

式中,KSW为传动比随转向盘转角δSW变化的影响系数,u1为高速区的过渡车速,u2为低速区的过渡车速,imax为传动比的最大值,imin为传动比的最小值。
3.2 滑模变结构控制器设计
滑模变结构控制的基本思想是在状态空间选择适当的滑模面,并通过反馈控制使系统误差稳定在滑模面上。
该控制器将二自由度模型作为参考模型计算出车辆理想的横摆角速度,将车辆横摆角速度的实际值与理想值之间的差值作为控制器的输入,控制器的输出为补偿转角。
选取控制误差量为实际横摆角速度ωr与理想值ωd之差,即

式中,ωd的值由式(1) 中的前轮转角和车速确定。
对式(3) 求导得

控制目标是找到控制规律使得实际横摆角速度在理想横摆角速度附近变化,选取滑模面s=e=0,在滑动模态下其控制方程为

式中,λ′为正常数。
将式(5) 代入式(1) 可得滑动模态下连续控制规律为

即滑动超平面uini为

当系统状态在滑动超平面之外时,需要加入监督控制以保证系统状态能够达到滑动超平面,即

式中,k为控制常数,该常数决定了状态变量到达滑模面的速度,该常数必须足够大以满足滑模条件

式中,η为正常数。
得最终控制率为


为了防止滑模控制系统抖振,用sat 函数代替sgn 函数,即

其中
式中,ε为边界层厚度。
最终,控制器的输出应为∆δf=δf−δfd。
4 硬件在环仿真系统
三轴汽车底盘电控硬件在环综合测试平台基于某东风商用车,以PXI 实时运算系统为核心,基于LabVIEW RT 系统,利用TruckSim 软件和Lab-VIEW 软件进行联合仿真。可用于极限工况、非极限工况下操纵稳定性道路实验。
整个实验系统主要由六部分组成,分别为上位机、下位机、端口系统、驾驶模拟器、制动平台及轮速模拟平台。上位机采用Windows 操作系统,用于车辆建模、监控仿真过程、显示、分析、保存仿真结果及编写控制程序。下位机采用PXI 平台,平台采用LabVIEW RT 实时操作系统进行整车动力学模型的仿真计算,能较好地模拟整车在制动、驱动、高速转向以及联合工况下的响应,并控制各种数据从相关板卡端口输入输出。
仿真平台上需要提供实时的数据输入、输出,为了模拟主动转向控制器的运行环境,在下位机上安装了丰富的数据端口板卡,系统的实时性得到了较好的保证。图5 为硬件在环框图及三轴汽车底盘电控综合测试平台。
5 实验验证与结果分析
实验工况选取典型的双移线工况,以30 km/h,50 km/h 和70 km/h 的车速分别在高附着路面和低附着路面上进行验证,分析有控制和无控制的车辆在行驶过程中相关的响应。
5.1 高附着路面下的双移线实验
在附着系数为0.85 的高附着路面上,车速为30 km/h 的实验结果如图6∼图8 所示。
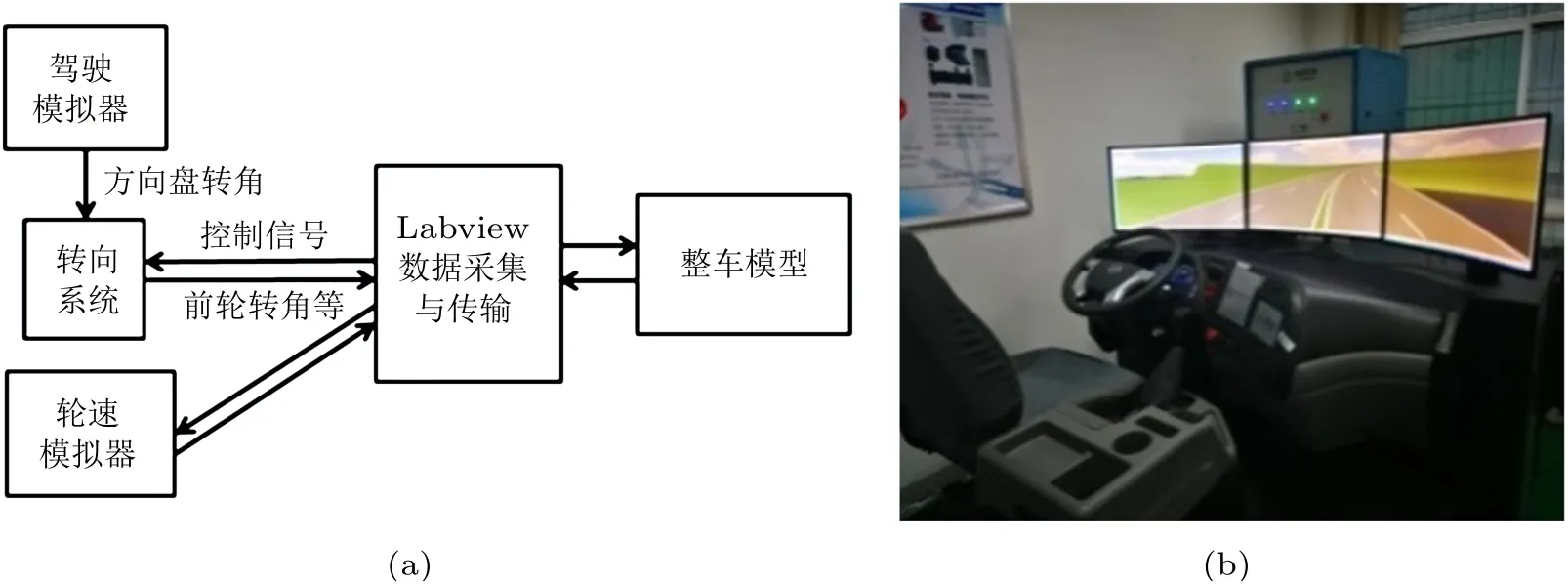
图5 硬件在环框图及三轴汽车底盘电控综合测试平台
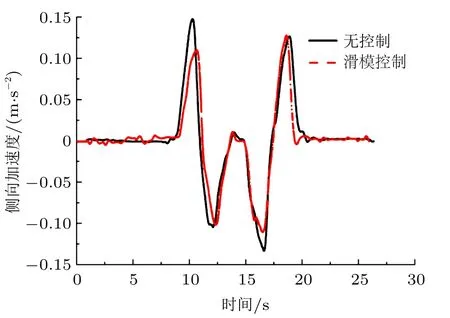
图6 高附着双移线工况侧向加速度相应曲线

图7 高附着双移线工况质心侧偏角响应曲线

图8 高附着双移线工况横摆角速度响应曲线
同样可得出车速分别为50 km/h 和70 km/h 时的实验结果。
将车辆在高附着路面上无控制时的响应和在有滑模变结构主动转向控制器作用下的响应结果进行对比分析,分析结果如表2 所示。
由实验结果可以看出,在车辆初始速度相同的情况下,与无控制的车辆响应对比,具有滑模变结构控制系统的车辆响应值在一定范围内都有明显下降,车辆的行驶稳定性得到了改善。在高速下,控制效果更显著。
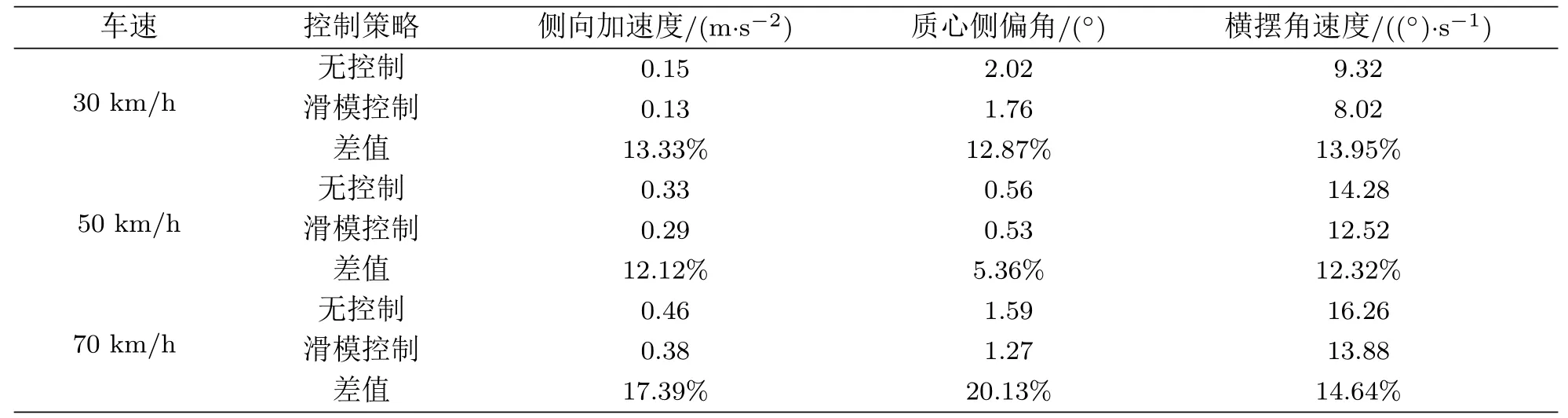
表2 高附着路面上的控制效果
5.2 低附着路面下的双移线实验
在附着系数为 0.4 的低附着路面上,车速为30 km/h 的实验结果如图9∼图11 所示。
同样,可得出车速分别为50 km/h 和70 km/h时的实验结果。
将车辆在低附着路面上无控制时的响应和在有滑模变结构主动转向控制器作用下的响应结果进行对比分析,分析结果如表3 所示。
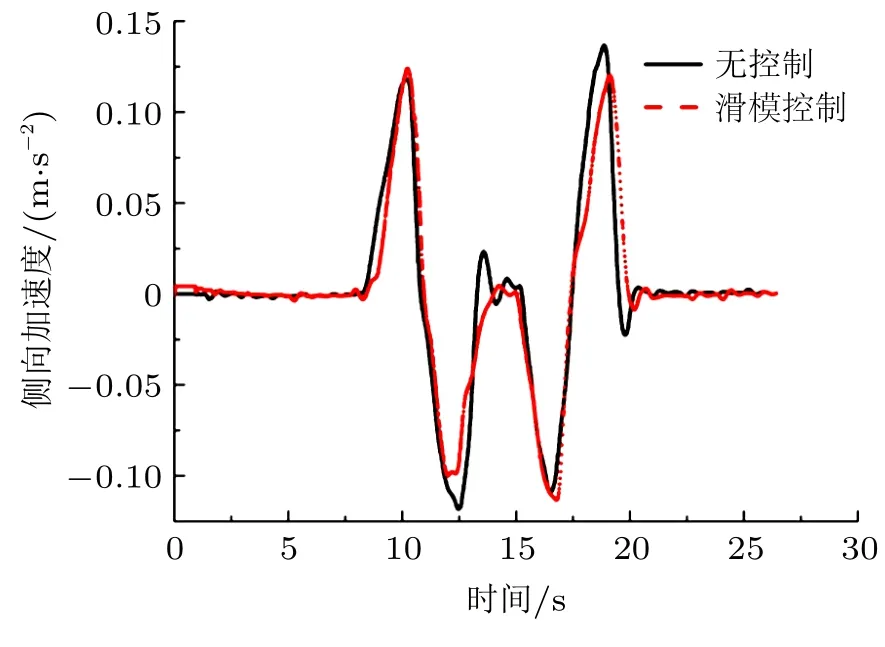
图9 低附着双移线工况侧向加速度相应曲线

图10 低附着双移线工况质心侧偏角响应曲线

图11 低附着双移线工况横摆角速度响应曲线
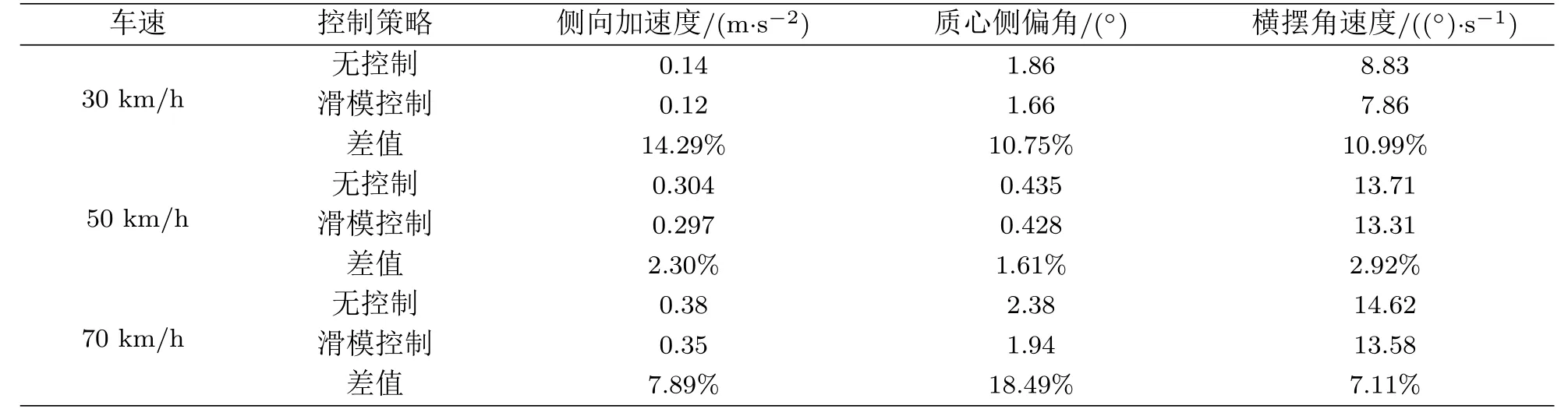
表3 低附着路面上的控制效果
由实验结果可以看出,在低附着路面上,施加滑模变结构控制后,车辆的侧向加速度、质心侧偏角、横摆角速度都有明显减小,可达10%左右,因此车辆的操纵稳定性得到了改善。
在车辆实际行驶过程中,车速和路面附着系数很有可能会发生改变,因此有必要分析控制效果对这两个因素的敏感性。对比表3 和表4 可以发现:
(1) 在速度不变的情况下,相比于无控制车辆,有主动转向变结构控制的车辆响应在高附着路面上的差值要比在低附着路面上的差值略大,控制效果相对明显,变结构主动转向系统在高附着路面上的控制效果略微优于在低附着路面上的控制效果,但两者之间变化程度主要在5%之内和7%∼10%之间,因此结果相差不大。
(2)在路面附着系数不变的情况下,有滑模变结构主动转向系统的车辆随着速度的增加,其控制效果出现略微下降的情况,当速度达到一定数值后再随着速度的增加其控制效果出现好转,但两者之间变化程度主要在5%之内和6%∼10%之间,仅在50 km/h升到70 km/h 时质心侧偏角的变化程度是10%以上,可能是由于滑模抖振的原因,因此结果相差不大。
综上所述,车速和路面附着系数的变化均对滑模变结构控制主动转向系统的控制效果产生影响,但影响较小,说明本文所提出的控制策略对车速和路面附着系数的适应性较好。
6 结论
基于滑模变结构控制理论,建立了重型商用车的主动转向控制器,通过硬件在环实验分析了有无主动转向控制的车辆在不同工况和车速下的操纵稳定性以及主动转向影响因素敏感性分析。研究表明:
(1)有主动转向控制系统的车辆平稳性要优于无控制车辆的平稳性,车辆在行驶过程中相关的响应在一定范围内都得到了合理有效的改善。
(2)路面附着系数和车速这两个影响因素对滑模变结构主动转向控制器的控制效果均有影响,但其影响差别不是很大,整体上都可以保证车辆在行驶过程中的操纵稳定性。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
北京航空航天大学学报(2017年4期)2017-11-23
作文周刊·小学一年级版(2017年27期)2017-08-10
中学生数理化·高一版(2017年3期)2017-07-08
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21