基于Halbach阵列的爬壁机器人磁吸附研究*
2020-11-04 01:29钟舜聪伏喜斌徐宗煌黄学斌
机电工程 2020年10期
刘 峰,钟舜聪,3*,伏喜斌,陈 曼,徐宗煌,黄学斌
(1.福州大学 机械工程及自动化学院,福建 福州 350108;2.厦门市特种设备检测院,福建 厦门 361000;3.上海大学 机电工程及自动化学院,上海 200072)
0 引 言
爬壁机器人是特种机器人领域的研究热点,不仅能够在地面上移动,还可以在倾斜或垂直的壁面上运动并完成预定的工作和任务[1-2]。针对大型油罐、船舶等铁磁性表面的清洁、检测等工作,往往使用磁吸附爬壁机器人进行操作,永磁吸附因其具有结构紧凑、吸附力大、无需消耗能量等优点,被广泛应用在该类爬壁机器人上。目前研究较多的磁吸附爬壁机器人是永磁吸附履带式爬壁机器人。对比非接触式磁吸附爬壁机器人,这种爬壁机器人将永磁体嵌入在履带中,具有吸附面积大、吸附稳定、壁面适应性好等优点。
为最大限度发挥磁性材料性能,提高吸附效率,需要对吸附装置的磁路进行优化设计[3]。桂仲成等[4]设计了一种非接触式的吸附单元,吸附单元由一块轭铁和若干块永磁铁组成,轭铁用于引导磁感线,能够提供较强的吸附力;但该结构存在质量较大的轭铁,导致吸附效率较低。胡绍杰[5]、黄忠等人[6]采用两块永磁体加轭铁的组合方式设计了磁吸附单元,中间加入了隔磁材料增加吸附效率,并将吸附单元整合进履带中,使吸附更加稳定;但还是存在吸附力较弱的问题。陈勇[7]、沈青青等人[8]将Halbach永磁阵列运用到非接触式磁吸附爬壁机器人中,磁能利用率较前面的吸附单元有较大提高;但非接触式爬壁机器人对壁面形状适应能力较差,只适合小型轻载爬壁机器人。闫晨飞等人[9]研究了一种变磁化方向磁体组合的永磁吸附装置,该装置由若干个磁化方向不同的永磁体紧密排列而成,这些永磁体的磁化方向首尾相连构成了环形;相较采用Halbach阵列排布的永磁吸附单元,吸附力得到了进一步提高,但由于该装置的磁体磁化方向较多,导致结构复杂、加工困难。
结合接触式永磁履带爬壁机器人的优点和Halbach磁能利用率大的特点,笔者设计新型的履带式爬壁机器人永磁吸附单元,采用Ansoft Maxwell对吸附单元磁感应强度和吸附力进行模拟仿真计算,分析不同结构参数对磁吸附性能的影响,并优化其结构,提升吸附效率。
1 磁吸附单元结构设计
Halbach永磁体阵列最早由美国的Klaus Halbach教授提出,现被广泛应用在电机设计中,它是指将不同充磁方向的永磁体按照一定规律排列,能够在磁体的一侧汇聚磁力线,使该侧表现出强磁性,另一侧为弱磁性[10]。
笔者设计了新型的磁吸附单元,如图1所示。

图1 新型磁吸附单元
图1中,新型的磁吸附单元由连接板、轭铁、Halbach永磁体阵列和套壳等结构组成,其中的Halbach永磁体阵列和轭铁组成吸附模块,产生吸附力。磁吸附单元固定在链节上,各个链节连接磁吸附单元形成磁吸附履带后提供爬壁机器人所需的吸附力。由于磁铁属于脆性材料,抗冲击性能较差,故采用铝制的连接板和套壳保护内部的永磁体阵列,避免磁体和吸附壁面直接接触,减少运动过程对磁体的冲击。在传统Halbach阵列的基础上,在弱磁侧加入了轭铁,能够引导弱磁侧的磁感线,减少磁场外泄,进一步增大强磁侧磁性。
永磁材料采用稀土永磁材料钕铁硼(NdFeB)。钕铁硼具有矫顽力Hc大、剩磁Br大、磁滞回线所包围的面积大的特点,表现出较强的磁性,且磁性较为稳定。选用NdFeB系列中的N35作为永磁材料。
NdFeBN35性能参数[11]如表1所示。
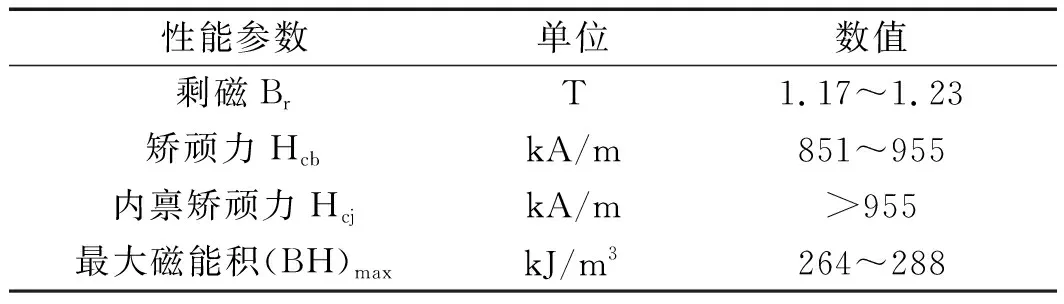
表1 NdFeB N35性能参数
轭铁主要起引导磁感线的作用,故应具有较高的饱和磁感应强度、较大的磁导率和较小的矫顽力,本研究选取Q235钢作为轭铁材料。
2 吸附力有限元模拟及实验验证
2.1 有限元模拟仿真
铝的相对磁导率和空气近似相等,故在进行有限元模拟时,笔者将磁吸附单元外部起保护和固定作用的铝套壳等结构省略,建立了吸附力分析模型,如图2所示。

图2 吸附力分析模型
图2中,吸附力分析模型内的永磁体阵列由5个正方体磁体组成,按照Halbach阵列进行排列,各磁体的磁化方向从左至右依次沿+z、+y、-z、-y和+z方向,尺寸均为10 mm×10 mm×10 mm。磁体阵列和壁面之间存在一定高度的空气间隙,厚度为2 mm。壁面材料为Q235钢,尺寸为60 mm×140 mm×10 mm。
笔者使用Ansoft Maxwell创建三维模型,添加材料参数,设置边界条件和计算方法,对该模型进行磁路仿真,得到中间截面的有限元模拟结果图,如图3所示。

图3 中间截面的有限元模拟结果图
由图3可以看出:(1)磁化方向垂直于壁面的磁体产生的磁感线,通过空气气隙进入壁面再回到磁体,产生吸附力;磁化方向平行于壁面的磁体主要起到引导磁感线向平行壁面方向汇聚的作用,使磁感线在靠近壁面一侧形成回路,从而加大强磁侧的吸附力;
(2)空气气隙和壁面中的磁感应强度相对于弱磁侧较强,但弱磁侧附近的空气中仍存在一定的磁场泄漏。为解决这一问题,在传统的Halbach阵列基础上加入轭铁,引导磁感线,减少磁场泄漏。其中,轭铁尺寸为50 mm×10 mm×3 mm。
对新的模型进行有限元仿真,得到加入轭铁后的磁感应强度云图,如图4所示。

图4 加入轭铁后的磁感应强度云图
从图4中可以看出,在轭铁的引导下,Halbach阵列上部的漏磁场经过轭铁引导,重新进入磁体中,弱磁侧的磁场泄漏明显减少。
2.2 实验验证
为验证有限元模拟的正确性,笔者设计了磁吸附力测量实验,如图5所示。

图5 磁吸附力测量实验
在图5中,为避免磁体因存在间隙而产生实验误差,在磁体装夹装置侧边加入了螺栓,从永磁体阵列两边夹紧,使磁体紧密接触;将实验装置安装在拉力机上,改变气隙厚度大小,测量不同气隙厚度下的吸附力大小。
通过改变气隙厚度,计算吸附力大小,吸附力的模拟及实验结果如图6所示。

图6 吸附力模拟及实验结果
从图6可以看出:(1)模拟仿真和实验中测量的吸附力随着空气气隙厚度的增大都呈现递减的趋势,并且减小的趋势逐渐减缓;两组数据基本吻合,有较好的一致性,能够验证有限元模拟的准确性;
(2)在气隙厚度较小时,模拟结果略大于实验测量数值,存在一定偏差,主要原因可能是实验采用的永磁体不是标准的立方体,存在圆角,会降低吸附力;同时,由于外部固定装置的加工和装配原因,实验过程中不能保证吸附单元内永磁体阵列底面和壁面完全平行;
(3)当气隙厚度大于7 mm时,此时吸附力较小,均在10 N以下,且实验测量数值略大于模拟结果,其原因可能是在进行吸附力实验时,当吸附距离增大到一定数值后,磁体产生的吸附力较小,拉力机上臂提升过程中产生的振动,使实验测量数据与模拟结果间产生较大偏差。
3 磁吸附单元结构参数分析
笔者提出的新型吸附结构单元中,吸附单元及尺寸参数如图7所示。
图7中,吸附单元由外部的固定结构和内部的吸附模块组成,其中,吸附模块包含了Halbach永磁体阵列和轭铁,Halbach永磁体阵列为对称结构。吸附单元的吸附力主要由其中的吸附模块提供。
为探究吸附模块各结构尺寸对吸附力和吸附效率的影响,笔者采用控制变量法,在保证其他尺寸不变的情况下,对某一尺寸进行分析,探究其大小对吸附力的影响情况。
各尺寸初始值如表2所示。

图7 吸附单元及尺寸参数a1-磁体A1的宽度;a2-磁体A2的宽度;a3-磁体A3的宽度;h-磁体的高度;b-磁体的厚度;t-轭铁的高度

尺寸a1a2a3hbt初始值/mm10101010103
吸附单元优化设计的目标是使吸附单元的吸附效率最大,其优化准则即是在一定的空气气隙厚度下,使吸附单元单位重量产生的吸附力最大化。
定义单位重量吸附力λ为:
(1)
式中:λ—单位重量吸附力,N/kg;Fm—吸附单元在一定气隙厚度下产生的吸附力,N;G—吸附单元重量,kg。
为使吸附效率最大,则λ应取得最大值。
笔者采用Ansoft Maxwell中的参数化扫描模块,对吸附模块各个结构尺寸进行参数化扫描分析,结果如图8所示。

图8 参数化扫描分析结果
如图8(a)所示,在磁体A1的宽度a1由0开始变大到30 mm过程中,吸附力随之增大,近似呈线性关系,吸附力Fm由55 N增长至120 N。单位重量吸附力λ在磁体A1的宽度a1=20 mm时到达最大值为939 N/kg,然后呈缓慢下降趋势。由此可知,磁体A1的宽度对吸附力大小影响较大,但单位重量吸附力存在最大值。结果表明:磁化方向垂直于吸附壁面的磁体,其主要作用是产生吸附力,其宽度对吸附力和吸附效率影响较大,宽度越大,提供的吸附力越大,但宽度超过一定的值后,吸附效率增长较慢或缓慢下降。
如图8(b)所示,在磁体A2的宽度a2从0变化到10 mm的过程中,吸附力从40 N变为95 N,随后保持不变。单位重量吸附力λ在a2=6 mm时到达峰值,并随着a2继续增大而急剧下降。由此可见,磁体A2的宽度a2存在一个临界值,超过此值后吸附力趋于最大值,单位重量吸附力则会迅速下降。可以得出结论:磁化方向平行于吸附壁面的磁体的主要作用是引导磁感线转向平行壁面方向,当其宽度增大到某一临界值后,引导的磁感线趋于饱和,宽度继续增大后对吸附力大小影响较小,反而导致单位重量吸附力变小,吸附效率下降。
如图8(c)所示,随着磁体A3的宽度a3增大,吸附力近似呈线性关系增长,单位重量吸附力达到最大值后缓慢下降。其对吸附力和单位重量吸附力的影响与磁体A1类似,作为磁化方向垂直于吸附壁面的磁体,主要作用是产生吸附力,其宽度越大,吸附力越大,吸附效率越高。
如图8(d)所示,随着磁体高度h的增加,吸附力在h=13 mm后增长速率开始放缓,吸附力趋于最大值,单位重量吸附力λ在h=10 mm时达到最大值873 N/kg,而后逐渐下降。由此可见,磁体高度也存在一个临界值,超过此值后,进入壁面的磁感线数量趋于饱和,导致吸附力趋于某一最大值,单位重量吸附力随着磁体高度h的增大、吸附单元重量的增加,会逐渐减小,吸附效率降低。
如图8(e)所示,随着磁体厚度b的增加,吸附力和单位重量吸附力都呈上升趋势,但单位重量吸附力的上升速率逐渐放缓。磁体厚度b对吸附力Fm和单位重量吸附力λ的影响都较大,与吸附力近似成正比关系。
如图8(f)所示,随着轭铁高度t的增大,吸附力缓慢增加,t达到2 mm后,吸附力逐渐稳定在90 N附近,单位重量吸附力逐渐减小。可以看出,轭铁高度t增大到一定数值后,导通的磁感线饱和,吸附力达到最大值,且和其他参数相比,轭铁高度t对吸附力的提升贡献较小,故轭铁高度t的值不能太大,否则影响吸附效率。
为使吸附效率最大,针对上述各结构外形尺寸分析结果,笔者选取最优的尺寸,代入到有限元模型中,分析其在空气气隙厚度为2 mm的情况下吸附力Fm和单位重量吸附力λ的大小。
优化前后各尺寸及计算结果如表3所示。
表3结果显示:优化后单位重量吸附力值由881 N/kg提升至1 413 N/kg,提升率为60.45%,吸附效率得到了较大提高。
4 结束语
针对履带式磁吸附爬壁机器人,笔者设计了新型的磁吸附单元,采用Halbach永磁阵列排布永磁体,配合轭铁减少磁泄漏,增大了吸附力。对磁吸附单元中吸附模块的多个结构尺寸参数进行分析,得出以下结论:
(1)磁化方向垂直于吸附壁面的磁体主要起产生吸附力的作用,其宽度对吸附力和吸附效率均有较大贡献;
(2)磁化方向平行于吸附壁面的磁体主要起引导磁感线的作用,其宽度超过某一值后,引导的磁感线趋于饱和,吸附力趋于最大值,继续增大其宽度会导致吸附效率下降;
(3)磁体阵列的厚度越大,其吸附力和吸附效率也越大。磁体高度大于一定的值后,吸附力增长缓慢,吸附效率下降。轭铁对吸附力有较小提升。
结合以上结论,笔者针对吸附效率进行了结构优化,模拟结果显示,磁吸附效率得到了较大提高。
猜你喜欢
船海工程(2022年6期)2023-01-02
力学学报(2022年6期)2022-07-10
机械工程师(2022年3期)2022-03-24
物理之友(2020年12期)2020-07-16
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22
上海医药(2018年21期)2018-11-21
科学与财富(2017年18期)2017-07-09
中学生数理化·高二版(2016年12期)2017-02-28
数理化学习·初中版(2009年2期)2009-03-30