
激光供能无人机集群充电策略研究
2020-11-05 05:05袁建华洪沪生赵子玮
激光与红外 2020年10期
袁建华,李 尚,黄 开,洪沪生,赵子玮
(三峡大学电气与新能源学院,湖北 宜昌 443000)
1 引 言
无人机(UAV)在电力巡线中的运用越来越趋向于集群化、协作化[1]。利用激光对UAV进行无线充电可以提高UAV的生存能力,对于激光供能UAV集群,制定怎样的充电策略是提高UAV生存能力和执行任务效率的关键[2]。目前,国内外对于集群化的UAV充电调度问题研究相对较少。文献[3]中通过对网络中剩余能量最少的节点进行充电来最大化网络的利用率。文献[4]将优化目标定为充电小车在充电周期中的休息时间占比最大化,将能量循环再生运用到充电调度中,并证明充电小车的最佳充电路线为最短的哈密顿回路。文献[5]中将优化目标定为充电小车的移动能耗最小化,验证了在无线传感器数量不变的情况下,多个充电小车在协作化的方式下可以覆盖更广的充电范围。文献[6]以文献[5]为基础构造了最小权重的哈密顿回路,并将其应用到二维无线传感器网络中。文献[7]提出一种先到先服务的调度策略(FCFS),谁先发出充电请求谁就先得到充电机会,忽略了空间优先级。文献[8]在文献[7]的基础上考虑空间优先级,提出了一种抢占式的调度策略(NJNP)。以上文献均是对离线状态下集群化的充电策略的研究,根据已有的能量消耗率对其进行充电调度。然而,UAV在执行任务的过程中其能量消耗率呈现出较高的动态性和多样性。因此,按照固有的能量消耗率来进行充电调度会造成UAV迫降过多的现象。所以,根据UAV的实时能量消耗来对UAV集群进行充电调度则显得尤为重要。
本文基于UAV的实时能量消耗,构建了UAV的动态能量消耗模型及UAV集群网络充电模型,提出了一种在线的激光供能UAV集群充电策略,适应于UAV能量消耗的多样性和动态性,具有高度的时效性。
2 无人机激光无线充电系统
激光无线能量传输技术的能量传输载体为激光束,通过光伏接收器接收激光能量来进行光电转换,从而实现了能量远距离无线传输[9]。
UAV激光无线供能系统主要由地面激光能量发射机和激光能量接收机组成[10]。如图1所示,主要包括:电源、激光器、跟瞄系统、光电转换系统、充电电池等。激光器将激光发射出去照射到激光接收端,由光电转换系统将激光能转换为电能为电池充电[11]。
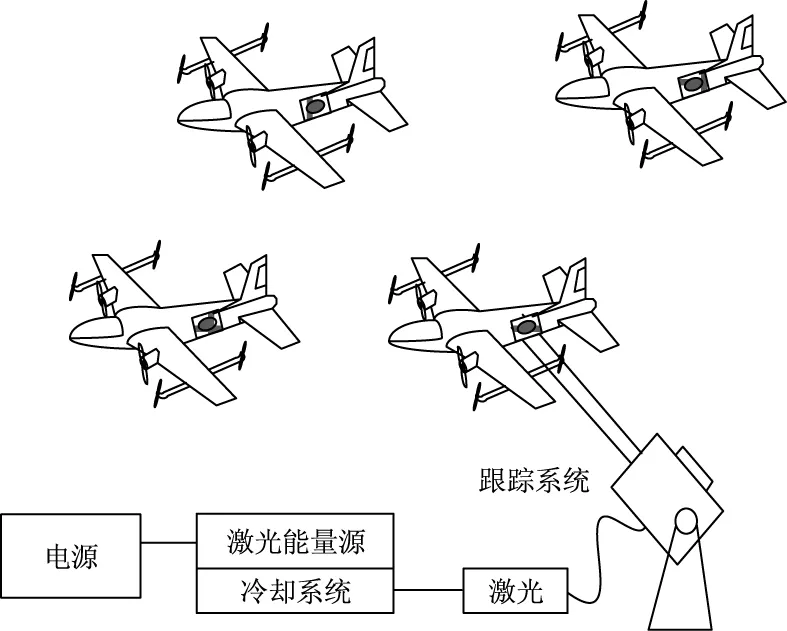
图1 UAV集群激光充电示意图
3 无人机集群激光充电网络模型
3.1 无人机动态能量消耗率模型
对于UAV集群,UAV的能量消耗是动态变化的。因此,集群充电调度的核心是估计UAV的实时能量消耗。
本文设对UAV进行充电前的UAV集群部署时间为零,从当前开始UAV以时间间隔Δt定期记录自己的当前剩余能量和当前时间值,并把这两个值以消息的形式发送给LC。例如UAVi以(IDi,REin,tin,urg=0),n≥0的形式将自己的信息发送给LC,REin表示UAVi的当前剩余能量,tin表示当前时间,urg=0表示这是一个普通的消息。UAVi的实时能量消耗率rin为:
(1)
LC在接收到(n+1)条UAVi的能量信息通告后,计算得到UAVi的能量消耗率Rin。利用加权平均法算得:
(2)
式中,tn表示UAVi记录第(n+1)条剩余能量的时间;rin为接收到第(n+1)条能量信息通告后的能量消耗率的当前值。
这样需要LC保存所有的剩余能量信息来计算UAV的动态能量消耗率,代价会比较大,改进公式(2)得:
(3)
式中,STn-1为基站接收到UAVi的第n个剩余能量通告的总时间。UAVi每更新一次它的能量消耗率,总时间STn就要累加一次:
STn=STn-1+tn
(4)
3.2 UAV集群充电模型
UAV在空中执任务时,LC根据每个UAV的能量信息选择性的对UAV进行充电。LC在上一个被充电的UAV充电结束后寻找下一个待充电的UAV的时间相对于UAV的充电时间可以忽略不计。当UAV的能量低于阈值Emin1时向LC发送充电请求信号,信号的表示形式为(IDi,REin,tin,urg=1),n≥0。urg=1表示这是一个充电请求信号,与之前的普通信号相区分。当UAV的能量低于Emin2时还没有得到充电机会,则UAV会自动进行迫降返回基地。
本文将UAV的迫降率记为δ,即为:
(5)
式中,mi为选择UAVi作为下一充电UAV时剩余UAV的迫降数量;n为UAV的总数量。
在任一t时刻UAVi的剩余飞行时间应该满足:
(6)
在任一t时刻UAVi的剩余飞行时间为:
(7)
若此时LC对UAVi进行充电,LC对UAV的充电功率为U,则LC对UAVi的充电时间为:
(8)
假设此时LC正在为UAVi进行充电,那么剩余发送充电请求的UAVj的充电容忍时间为:
(9)
若Dj(ti)=0说明UAVj得不到充电机会,需要迫降,从充电队列中删除。
3.3 REOCS充电方案
LC在充电过程中选择哪一个UAV为下一充电UAV是本充电策略的关键。其基本思路为:若UAV的剩余能量低于Emin1则该UAV需要充电,被纳入充电服务池M中。当充电服务池为非空时,计算每个待充电UAV的剩余飞行时间与选择某一UAV作为下一充电UAV时,剩余UAV的充电容忍时间,通过对比两个时间始终选择使UAV迫降数最少的UAV作为下一充电UAV。具体过程描述如下:
(1)LC对UAV进行充电前计算充电服务池中UAV的剩余飞行时间。
(2)将剩余能量小于Emin1的所有UAV加入M中。
(3)对M中待充电的UAV计算它的充电容忍时间。
若Dij>0说明选择UAVi作为下一个充电UAV时,UAVj不会迫降。若UAVi对于所有的UAVj(j≠i,j∈请求充电的UAV)都满足Dij>0,将UAVi加入到充电候选集X中。
(4)如果集合X为非空集,则LC计算集合X中的UAV的充电时间。选择充电时间最短的UAV作为下一个充电UAV。
(5)如果集合X为空集,计算则选择δ最小的UAV作为下一充电UAV。
已经选中的UAV在充电完成后从LC的充电服务池中将其删除。清空集合X,执行(6)。
(6)重复(1)~(5),直到UAV集群任务完成。
4 UAV集群充电优化算法
激光供能UAV集群充电调度问题其实是一个旅行商问题TSP(Traveling Salesman Problem),对于此类问题有很多的算法可以运用[12]。本文提出一种改进的蚁群算法,通过考虑UAV的剩余飞行时间及UAV集群的迫降率结合UAV的实时能量消耗率来选择下一需要充电的UAV,有效地解决了以往离线充电模式缺乏实时性的问题。
4.1 充电调度转移策略
本文的算法中将蚂蚁看作是LC,蚂蚁的个数为A。初始状态蚂蚁K(K=1,2,…,A),随机选择一台能量最低的UAV进行充电。LC在对UAVi充电结束后,继续选择下一台需要充电的UAVj。在满足充电约束的条件下应考虑以下因素:
1)蚂蚁K从UAVi到下一UAVj的路径上的信息素浓度σij(t),信息素浓度越大,蚂蚁K选着UAVj的概率越大。
2)蚂蚁K遍历的下一UAVj的剩余飞行时间,剩余飞行时间时间越短,蚂蚁K选择该UAV的概率就越大。
3)选择UAVj作为下一充电UAV时,UAV的迫降数量越少,选择该UAV的概率越大。
通过以上因素,蚂蚁K从UAVi移动到下一节点j的转移策略为:
(10)
其中,α,β,γ为权重系数。
4.2 信息素更新策略
在算法进行多次运算后会留下较多的残留信息素,启示信息将会被淹没,因此需要对信息素进行更新,(t+1)轮的信息素更新公式如下:
(11)
其中,1-ρ(0<ρ<1)为路径上信息素的持久性因子;W表示前t轮算法遍历的m个UAV的集合;Δσij(t)表示第t轮蚂蚁K残留的信息素。
本文中第(t+1)轮的信息素浓度不仅与上一轮的信息素浓度有关还要考虑UAV与LC的空间距离,空间距离越短,信息素浓度越大,选择UAVj作为下一充电UAV的概率越大。故,蚂蚁K在路径(i,j)上的信息素浓度具体表示形式为:
(12)
4.3 集群充电调度方案
基于上述改进的蚂蚁算法和信息素更新策略,我们在基于实时检测UAV动态能耗的UAV群激光充电策略中在考虑UAV群的迫降率与UAV与LC的距离及UAV的剩余能量的基础上选着下一UAV进行充电,充电调度算法流程图如图2所示。
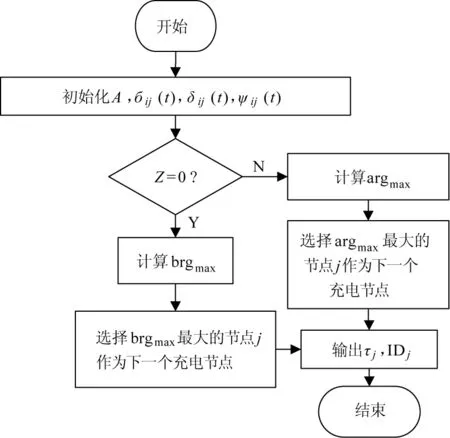
图2 充电调度算法流程图
5 算例验证
本研究基于matlab仿真平台,对本文提出的充电策略(REDOCS)进行性能分析,并与传统的FCFS,NJNP调度策略进行对比。通过UAV的迫降率与充电延迟两种性能对比三种不同的充电策略,分析了REDOCS的性能。
本文选用IN-SPIRE2四旋翼无人机,在底部安装10 cm×10 cm的GaAs光伏电池,电池容量为4500 mAh,最大充电功率为180 W,充电电流为10 A,工作放电时间为45 min[13-14]。
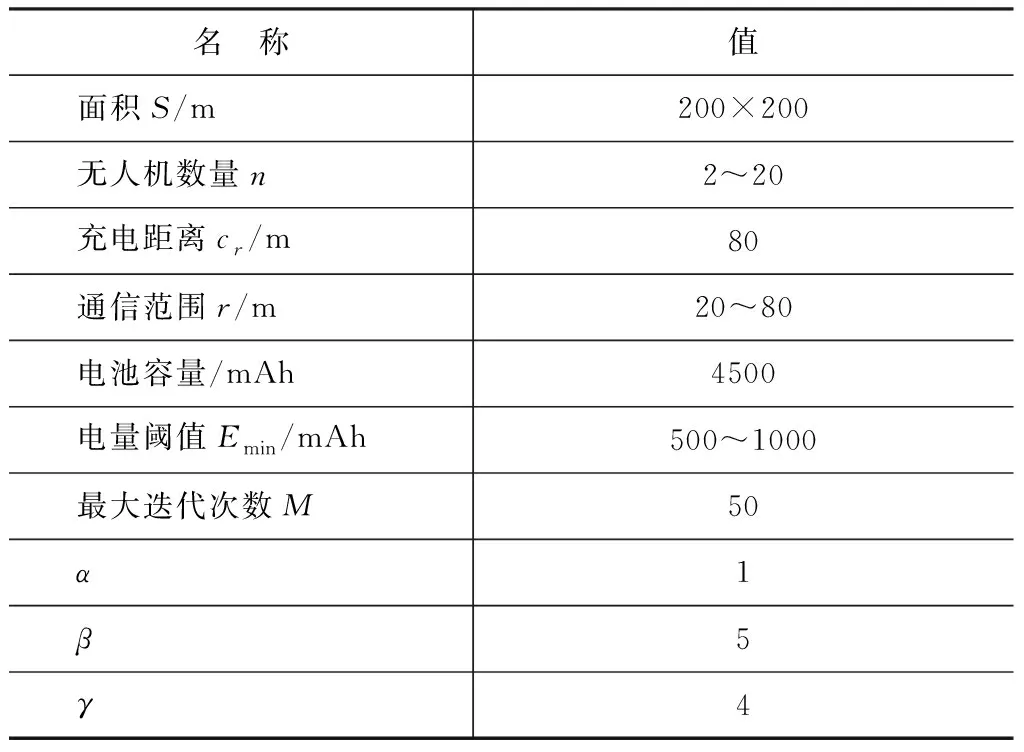
表1 仿真参数设定
5.1 光伏电池性能测试
本节用同波长(808 nm)不同功率的激光对GaAs光伏电池进行充电,分析其性能,其性能如图3所示。
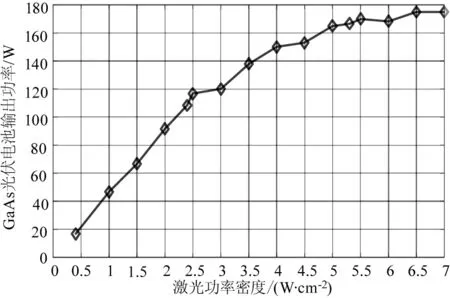
图3 不同激光功率密度下GaAs光伏电池的输出功率
从图3可以看出当激光功率密度为7 W/cm2时,GaAs电池的输出功率达到176 W,但光电转换率为25 %,严重浪费了资源。当激光功率密度为1 W/cm2,光电转换率达到了46.67 %,但GaAs电池的输出功率为46.66 W,不足以支持UAV集群不间断飞行。为了避免浪费资源,同时使UAV集群可以安全可靠的运行,本文选择激光充电器的功率密度为5.5 W/cm2,这时GaAs电池的输出功率达到170 W,光电转换率为31 %。
5.2 激光功率密度对性能的影响
本节在4.1节的基础上分析激光功率对充电策略性能的影响,并进一步验证4.1节所选激光功率密度的合理性。其他参数为上述默认值,激光功率密度从3 W/cm2到7 W/cm2依次变化。三种充电策略的性能变化如图4所示。
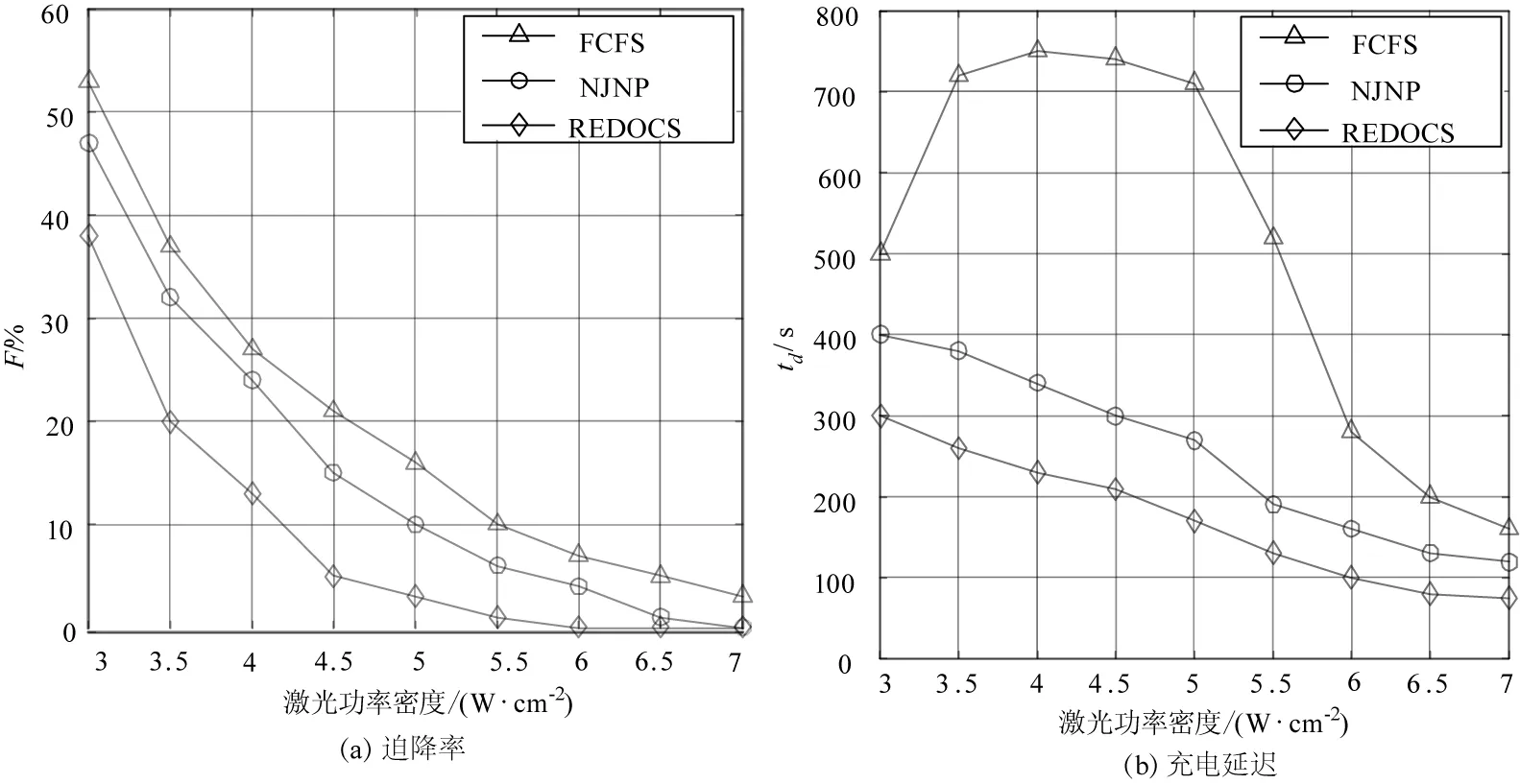
图4 不同充电功率下的策略性能
从图4(a)可以看出,随着充电效率的逐步提高,UAV集群的迫降率同步下降。这是因为当充电效率提高时,对单个UAV的充电时间减少了,在同样的时间内,LC可以服务更多的UAV。通过对比三种策略可以看出,随着充电效率的逐步提高,REDOCS的迫降率始终低于其他两种策略,这是因为REDOCS考虑UAV的实时能量消耗率,对UAV的剩余飞行时间及充电时间进行了合理的估计,LC可以根据UAV的实时能量消耗率来计算UAV的充电容忍时间,使其可以在充电容忍时间内得到充电机会。从图4(b)中可以看出,随着充电效率的增加,FCFS的充电延迟先增加后减小,NJNP与REDOCS的充电延迟逐步减小。这是因为,当充电效率增加时,充电请求增多,LC需要充电的UAV增加,使得UAV等待充电的时间增多,当充电效率增加到一定值后,UAV的充电时间变短,使得充电延迟降低。REDOCS的充电延迟优于NJNP,这是因为REDOCS总是选择充电时间最少的UAV作为下一充电UAV,使得整个网络的充电延迟减小。从图4中可以看出,当激光功率达到5.5 W/s时,UAV的迫降率以及充电延迟都在一个合理的范围内,激光功率的增加对UAV的迫降率和充电延迟的减少意义不大。
5.3 UAV数量对性能的影响
本节分析UAV的数量对三种策略性能的影响。其他参数为上述默认值,UAV的数量从2个逐步增加到20个,三种充电策略的性能变化如图5所示。
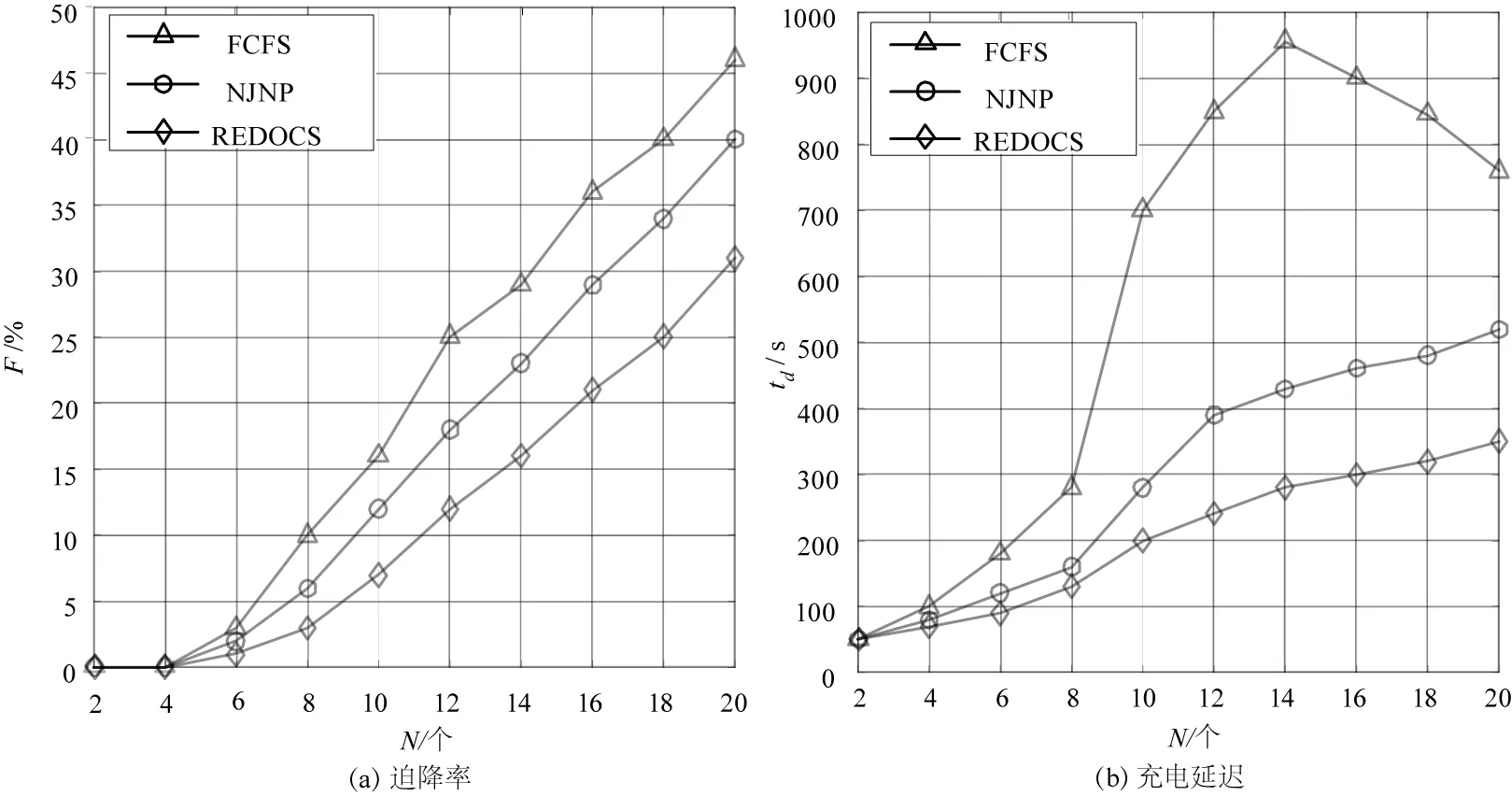
图5 不同UAV数量下的策略性能
从图5(a)中可看出,在UAV数量较少时,三种策略的迫降率相差不大,这是因为当UAV较少时,LC可以很快的完成对少数UAV的充电调度。随着UAV的数量增加,三种策略的迫降率呈现不同程度的上升。这是因为当UAV过多时,LC接收到的充电请求增多导致较多的UAV得不到充电机会。REDOCS的迫降率始终低于其他两种策略,这是因为这本策略在合理设置充电请求发送门限值的前提下,根据UAV的实时能量消耗率来计算各待充电UAV的充电容忍时间和选择该节点充电时,该节点的充电时间,始终选择使迫降率最小的UAV作为下一充电节点。从图5(b)中可看出,随着UAV数量的增加,NJNP与REDOCS的充电延迟呈较缓的增长趋势,REDOCS的充电延迟始终低于NJNP。这是因为REDOCS更加偏向于选择充电时间最短的UAV作为下一充电UAV,提高了整网络的性能,降低了网络的充电延迟。
6 结 论
本文根据UAV激光充电的特点提出了一种基于实时能量检测的在线充电策略(REDOCS),本策略考虑了UAV在实际环境能量消耗的多样性、高度的动态性以及充电的公平性。根据REDOCS,始终选择下一充电的UAV,保证整个网络的迫降率最小。算例验证表明,REDOCS可以在保证整个网络寿命的同时,有效地降低迫降率。
猜你喜欢
车用发动机(2022年3期)2022-06-24
军事运筹与系统工程(2019年4期)2019-09-11
装甲兵工程学院学报(2019年2期)2019-07-10
电子制作(2018年11期)2018-08-04
汽车电器(2018年1期)2018-06-05
少儿科学周刊·儿童版(2017年5期)2017-06-29
中国交通信息化(2017年3期)2017-06-08
学苑创造·A版(2017年3期)2017-04-27
知识就是力量(2017年2期)2017-01-21
学苑创造·A版(2014年6期)2014-08-04
