基于陷波器校正的有源阻尼控制策略
2020-11-05 11:19张计科王美臣
机械工程与自动化 2020年5期
张计科,王美臣
(1.内蒙古工业大学 电力学院,内蒙古 呼和浩特 010080;2.内蒙古自治区机电控制重点实验室,内蒙古 呼和浩特 010080)
0 引言
逆变器是光伏并网发电系统的核心,能将直流电转化为交流电并馈入电网。在逆变器和电网之间增加LCL滤波器,可以抑制开关谐波,获得正弦度高的并网电流,以保证系统的高效运行[1]。
LCL滤波器与传统的L、LC滤波器相比,体积更小,成本更低,在相对较低的开关频率下能获得较好的高频谐波衰减效果,是大功率系统滤波的首要选择之一,但LCL滤波器在谐振频率处产生的谐振尖峰将会导致系统振荡[2]。为了有效地解决这个问题,改善并网逆变器的动态特性,常采用无源阻尼和有源阻尼两种控制策略[3]。无源阻尼法虽然能够抑制LCL滤波器的谐振,但阻尼电阻的增加会影响滤波效果,增加系统损耗,降低并网逆变系统的效率,尤其是无源元件数量的增加会使电路变得更加复杂,因而常采用有源阻尼法,通过适当的控制算法,从控制环路上修正LCL滤波器的频率特性,抵消系统谐振,从而达到增加系统阻尼的目的[4]。Pérez-Estévez D等[5]构造了电流闭环控制系统,采用PR控制器来抑制LCL滤波器的谐振尖峰,但是当电网频率发生变化时,系统的稳定性很难维持。鲍陈磊等[6]和王黎绚等[7]采用了基于PI调节器的以电容电流为控制变量的有源阻尼控制策略,并提出了一种依据系统稳定裕度要求来设计闭环参数的方法,但该方法需要考虑的约束条件比较多,增加了计算难度。王金强等[8]提出了一种基于准PR控制器结合陷波器的有源阻尼控制策略,并采用极点配置和零极点对消的方法设计系统稳定条件下的控制器参数,但该方法需要反复的试凑才能找到合适的参数。
针对上述情况,本文采用基于陷波器校正的有源阻尼控制策略,并提出了一种“劳斯稳定判据+最优PI控制器设计”方法来确定满足条件的控制器参数,以期提高系统效率,增强系统稳定性和减小初始冲击。
1 光伏并网逆变系统工作原理及LCL滤波器特性
三相LCL型光伏并网逆变系统由光伏阵列PV、DC/DC变换器、逆变器、LCL滤波器、控制器和SPWM驱动电路等组成,如图1所示。图1中,Cdc为直流侧电容,VT1~VT6为逆变器各开关管,L1为逆变器侧电感,L2为网侧电感,C为滤波电容,udc为直流母线电压,uinv为逆变器输出电压,uga、ugb、ugc为电网三相电压,i1为逆变器侧电流,i2为并网电流,ic为滤波电容电流。

三相LCL型光伏并网逆变电路是相互对称的,为简化分析,可建立LCL型滤波器的单相等效电路。因此,由图1可以推导出LCL滤波器的传递函数为:

图1 LCL型光伏并网逆变器有源阻尼控制结构图
(1)
其中:ωres为谐振角频率,其表达式为:
(2)
其中:fres为谐振频率。
LCL滤波器的伯德图如图2所示。从图2中可以看出:当LCL滤波器的频率高于转折频率时,滤波器幅频特性曲线的斜率可达到-40 dB/dec,能较好地滤除并网电流中的开关谐波及高次谐波,但在某一频率内系统将产生谐振,同时相位会发生-180°跳变,从而影响系统的稳定性能,因此需要针对LCL滤波器谐振问题进行有效控制。

图2 LCL滤波器的伯德图
1.1 陷波器抑制谐振的工作原理
陷波器是带通滤波器的一种,它不仅可以在给定频率带宽内迅速衰减输入信号,改善电流波形,而且作为一种主动型的补偿装置,具有较好的动态性能[9]。
本文主要通过电流环前向通道中串联陷波器的方法来改善LCL滤波器的频率特性,以提高系统的性能。陷波器的传递函数可以表示为:
(3)
其中:ωr为陷波器的陷波频率;ξ为阻尼系数,ξ=0.7。
陷波器的伯德图如图3所示。从图3中可以看出:当陷波器的陷波频率ωr设定为LCL滤波器的谐振角频率ωres时,陷波器会依据设定的参数构造一个负谐振尖峰,以此抵消LCL滤波器产生的正谐振尖峰,从而保证系统的稳定。值得一提的是陷波器的控制不改变系统的低频和高频特性,因而系统的控制和滤波特性基本不受影响,可以达到期望的阻尼效果。
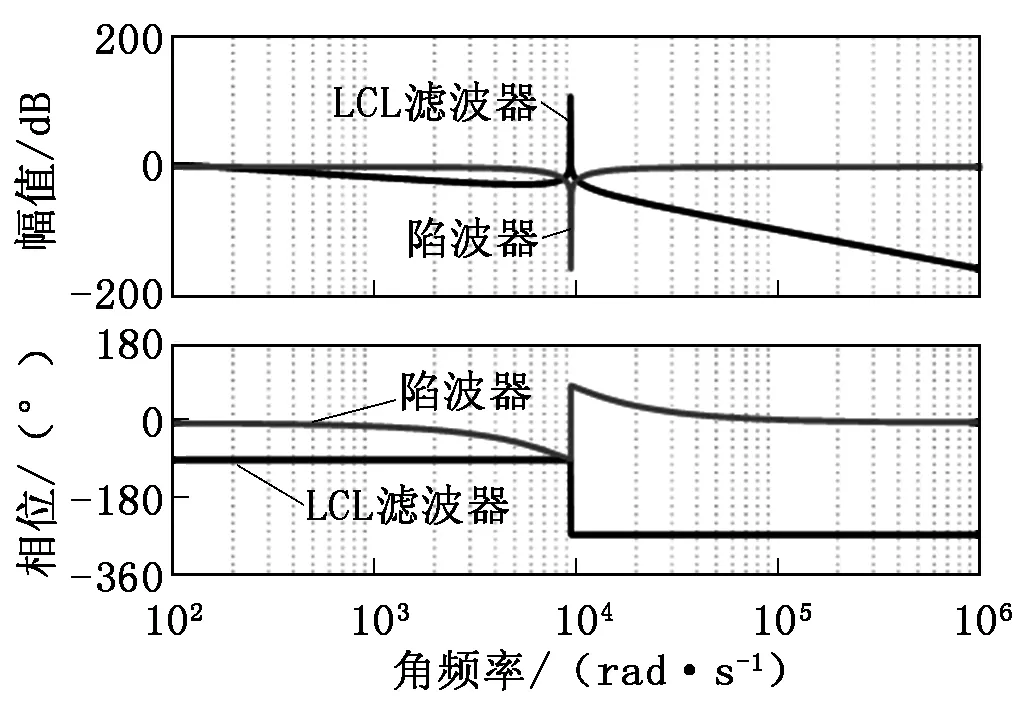
图3 陷波器的伯德图及与LCL滤波器伯德图比较
1.2 劳斯稳定判据+最优PI控制器设计
最优PI控制器设计方法的主要思想是若以误差信号作为动态信号,则经常采用积分型的性能指标。因此,可以定义关于误差绝对值积分(integral of absolute error)的性能指标ITAE如公式(4)所示[10]:
(4)
该性能指标实现简单,通过MATLAB软件仿真运算即可。
对如图1所示的控制系统进行分析可知,该控制系统采用电压外环、电流内环的控制方式。为了获得较好的跟随性,减小初始冲击,对电流内环展开深入的研究,优化PI控制器的参数。图1所示的控制结构可以简化为如图4所示的方框图。其中,GPI(s)为PI控制器的传递函数(kp为比例系数,ki为积分系数),Gtrap(s)为陷波器的传递函数。根据逆变器的放大特性,可将其等效为比例增益kspwm。

图4 有源阻尼法电流控制方框图
先利用劳斯稳定判据对系统进行分析,确定使系统稳定及临界稳定的范围,并进行粗糙调节。具体过程如下:
在忽略ug作用的情况下,可得到系统的开环传递函数为:
(5)

则对应的特征方程为:
D(s)=A1s6+A2s5+A3s4+(A4+B1)s3+(A5+B2)s2+B3s+B4.
(6)
由劳斯稳定判据可以得到使系统稳定的充分必要条件为:

(7)
再利用最优PI控制器设计的思想,将图4按传统串行控制系统进行定义,确定控制器及被控对象。被控对象可以表示为:
在已知被控对象的前提下,利用数值最优化技术可以很容易地得出最优的PI控制器。即利用ITAE性能指标对误差进行加权,时间t越长加权越大,这使得误差信号快速收敛,保证输出信号能很好地跟随输入信号的变化,只有这样才能使系统的性能得到提升。
综上所述,该方法具有响应快速、实现简单的优点。当kp=1.56、ki=1.2时能保证逆变系统有较好的稳定性。其中,ki值应小于5,因为随着该值的增加,系统误差会减小,但响应时间较长,存在振荡,会影响系统的动态特性。
1.3 有源阻尼控制策略性能分析
由公式(5)绘制控制系统的伯德图,如图5所示。从传递特性来看,三相LCL型光伏并网逆变器在采用基于陷波器校正的有源阻尼控制策略后,原谐振峰得到了极大的衰减,接近0 dB。系统高频段衰减速率几乎没受影响,能保持良好的滤波特性,而且并网电流在基波频率处的增益为0 dB,系统稳态误差近似为零,保证了系统的控制特性,提高了系统的稳定性,最终确保光伏发电系统安全、高质量运行,并实现并网控制。

图5 基于有源阻尼控制策略控制系统的伯德图
2 仿真结果及分析
在MATLAB软件上搭建系统的仿真模型,光伏输出功率为12 kW,直流母线电压为776 V,电网额定电压为220 V,额定频率为50 Hz,开关频率为10 kHz,L1=4.5 mH,L2=1.5 mH,C=10 μF。本文分别采用PR和PI控制器对电流进行调节,从而进行对比分析。图6、图7为两种控制器系统达到稳定状态时的并网电压、电流波形。从图6和图7中可以看出:采用PR控制器作为调节器时,系统响应较慢,存在启动过程,在时间t=0.032 s时才能跟踪上额定值;而采用基于PI控制器与陷波器相结合的有源阻尼控制策略后,系统可以较快地达到平稳状态,并保证输出电压和电流的波形都是正弦且稳定的。最后对系统进行FFT分析,如图8所示,测得并网电流总谐波含量值THD为2.95%,满足相关国际标准规定的THD小于5%的要求。

图6 基于PR控制器的仿真结果

图7 基于PI控制器的仿真结果

图8 并网电流谐波频谱
3 结论
本文详细分析了基于陷波器校正的有源阻尼控制策略,通过对控制结构的设计,利用陷波器的负谐振峰特性消除LCL滤波器的固有谐振,提高了并网电流质量。同时,由闭环控制系统可知,PI控制器参数的设计对系统的影响较大,根据提出的一种结合“劳斯稳定判据+最优PI控制器设计”方法,可以得到适合的参数,提高了系统的性能,该方法简单又不需要反复试凑。最后在MATLAB仿真平台上对采用的控制策略进行仿真研究,验证了该策略比基于PR控制器的有源阻尼方法响应速度快、稳态性能更好。
猜你喜欢
物探与化探(2020年2期)2020-04-21
通信电源技术(2018年3期)2018-06-26
西南交通大学学报(2016年3期)2016-06-15
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年4期)2016-04-04
火控雷达技术(2016年3期)2016-02-06
西部广播电视(2015年3期)2016-01-15
广西文学(2015年9期)2015-10-24
全球定位系统(2014年5期)2014-08-21
现代防御技术(2014年5期)2014-02-28