矿用皮带运输机控制系统设计*
2020-11-05 10:56王丽珍薛小兰刘慧玲
机械工程与自动化 2020年5期
王丽珍,薛小兰,刘慧玲
(晋中学院 机械系,山西 晋中 030619)
0 引言
皮带运输机是以传送带作为牵拉和承载部件的连续运输机械设备,由于其具备传送物体平稳、结构简洁、费用低、方便运输等特点,广泛应用于露天矿和煤矿井下的物料输送等场合中[1-3]。传统的煤矿皮带运输机往往依靠继电接触控制系统及人工巡查等方法来开展监控工作,导致系统工作效率低、实时性差、存在大量的安全隐患。将PLC技术应用于煤矿皮带机监控系统中能够有效地提高监控工作的效率,及时发现皮带运输机运行过程中可能出现的问题,避免事故的进一步扩大,同时也能减轻工人的劳动强度、降低劳动风险,并大大降低皮带运输机的非正常停机时间,从而保证井下煤炭运输工作的高效开展[4]。
1 矿用皮带运输机系统
针对山西某煤矿四级皮带运输系统,设计其顺序启停运行控制、各级皮带的故障保护控制、故障报警等功能,通过监测仪表对皮带运输机的运行状态、系统参数以及故障信息进行实时监测。当发现某级皮带故障/异常时,由PLC控制器作出逻辑判断,对皮带运输机进行声光报警及停机保护,实现对矿用皮带运输系统的自动监控。
1.1 矿用皮带运输机常见的皮带故障及其检测方法
皮带故障是煤矿皮带运输系统在工作过程中引发设备故障的常见因素,可通过选择相应的传感器来检测不同的故障类型,达到及时保护系统并排除故障的目的,从而提高煤矿井下作业的安全性与高效性[5]。
1.1.1 皮带跑偏故障
在皮带运输机工作过程中,皮带纵向轴线偏离运输机中心线时会出现皮带跑偏。该类型故障可选用型号为GEJ40的矿用本安型跑偏传感器进行检测,PLC可依据跑偏传感器的1级跑偏(轻跑偏)信号和2级跑偏(重跑偏)信号对系统分别进行报警处理操作和停车处理操作。
1.1.2 皮带撕裂故障
皮带撕裂现象会对皮带设备及其运输系统造成较大的损坏,甚至造成人员伤亡等严重后果。该类型故障可选用型号为GVY10的撕裂传感器进行检测,PLC可依据撕裂传感器对应开关触点的动作情况对系统发出控制保护信号,以切断皮带运输机的电源,使系统停运,防止事故扩大。
1.1.3 皮带打滑故障
皮带打滑现象会使运输机滚筒表面温度骤然升高,从而引起皮带着火,甚至引发井下煤料、瓦斯的爆炸等严重事故。该类型故障可选用型号为GSC200的智能型速度传感器对皮带机的从动轮速度进行检测,当速度传感器的输出端输出低电平时,通过PLC自动切断皮带机电源,实现低速保护。
1.1.4 皮带堆煤故障
皮带堆煤现象会使皮带驱动电机负载增加,从而造成运输机皮带传动滚筒出现空转,引起皮带打滑、跑偏等故障的发生,降低皮带运输系统的稳定性,造成系统停运、驱动电机烧毁、断带等后果。该类型故障可选用型号为GUJ30的堆煤传感器完成检测,系统如果出现堆煤现象,该传感器相应的开关触点就会动作,传出故障信号,PLC可及时做出停机保护操作。
1.2 矿用皮带运输系统控制要求
本文研究的四级皮带运输机为DSJ系列可伸缩带式输送机,其布置示意图如图1所示,皮带编号分别为PD-1、PD-2、PD-3、PD-4,各级皮带的运行分别由4台YBK2系列隔爆型三相异步电动机M1、M2、M3、M4驱动。

图1 四级皮带运输系统示意图
为了保障四级皮带运输系统的安全可靠运行,并实现其智能监控功能,所设计系统应满足如下控制要求:
(1)初始状态:所有装置均处于停止状态。
(2)启动操作:当启动按钮接通后,各级皮带驱动电机按M4→M3→M2→M1完成逆序启动,且各级启动时间间隔为5 s,以防止皮带发生故障时上级皮带出现堆料情况。
(3)停止操作:停止按钮接通后,各级皮带驱动电机按M1→M2→M3→M4完成顺序停止,且各级停车时间间隔为10 s,以防止各级皮带停运后出现物料未及时拉出的问题。
(4)安全操作:若某级皮带发生故障/异常时,此级及其所有上级皮带全部停止运行,同时给出声光报警提示;并配有紧急操作装置,其余级皮带10 s后顺序停止运行。
2 矿用皮带运输机控制系统硬件设计
山西某煤矿皮带运输系统四级皮带的运行分别由4台YBK2系列煤矿井下用隔爆型三相异步电动机M1、M2、M3、M4进行驱动。分析该四级皮带运输机系统的控制要求,计算出控制系统所需的数字量输入点26个、数字量输出点13个,所选的可编程控制器CPU型号应满足系统所需输入/输出点数并留有一定的扩展裕量。综合考虑系统所需容量需求等方面因素,PLC选用德国西门子公司S7-200系列的CPU226(24入/16出),并为其配置一块EM221 DI8-DC24V数字量输入模块。
依据系统的控制要求选择合适的输入输出元件,并完成PLC输入、输出点的配置,列出控制系统的I/O分配表,如表1所示。

表1 控制系统输入/输出分配表
以四级皮带运输系统的工作流程及列出的I/O端子分配表为依据,可设计出控制系统的PLC硬件接线图,如图2所示。

图2 控制系统PLC硬件接线图
3 矿用皮带运输机控制系统程序流程图设计
根据矿用四级皮带运输机运行的控制要求,设计出四级皮带运输机控制系统程序流程图,如图3所示。
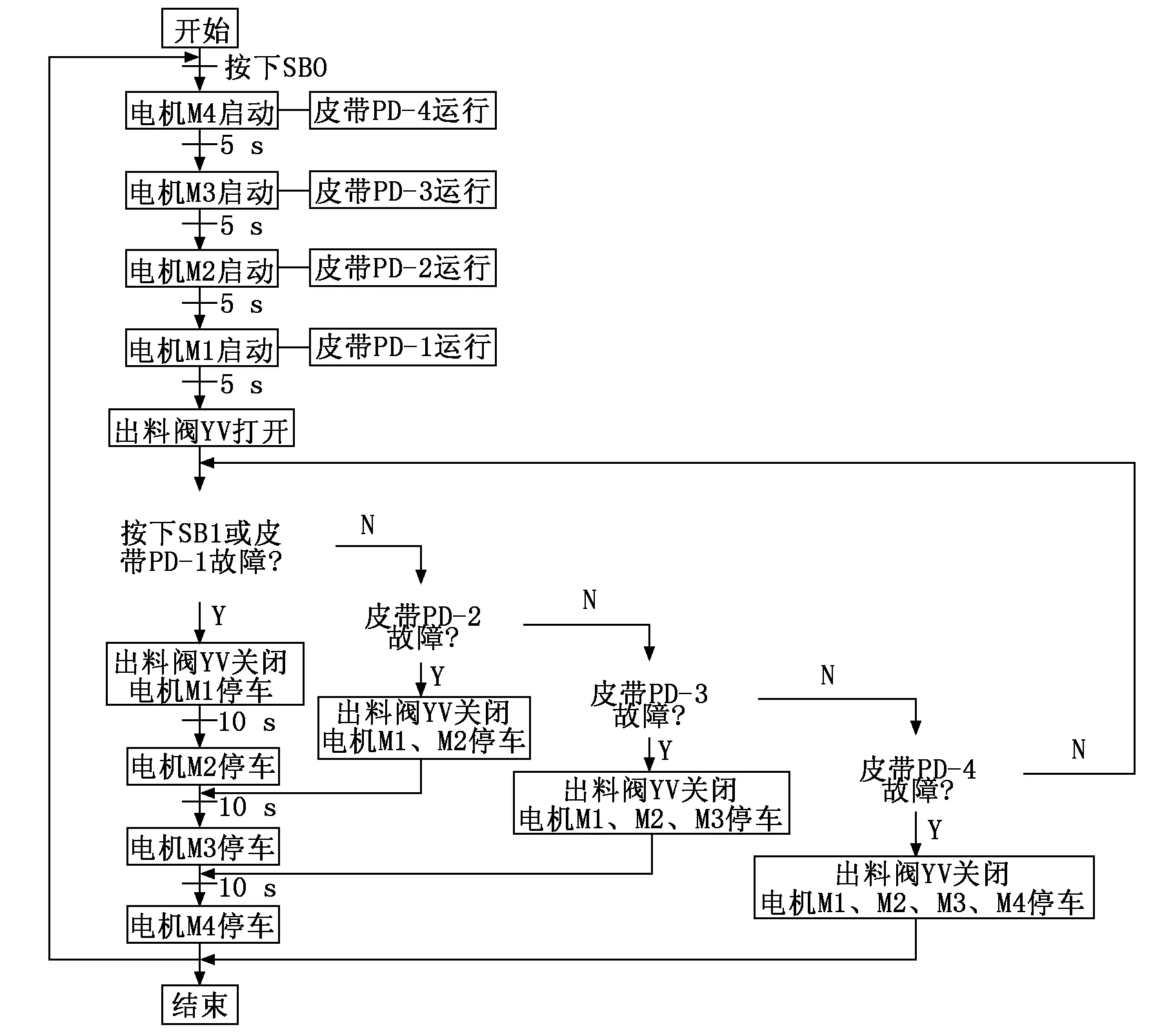
图3 系统程序流程图
4 结论
本文完成了对矿用四级皮带运输系统的顺序运行控制、各级皮带常见类型故障检测和故障报警控制的设计。矿用皮带运输机系统在引入可编程控制器进行控制后,能够实现对井下皮带运输机运行情况的实时监测,有利于及时对矿用皮带运输机故障的排除,极大地提高了皮带运输系统的可靠性,解决了传统皮带运输机监控系统中的弊端,在提高煤矿生产效率的同时,也给煤矿工人提供了较好的生命安全保障。
猜你喜欢
中国储运(2022年11期)2022-11-30
国际太空(2021年8期)2021-11-05
军事文摘(2020年15期)2020-08-15
物流技术与应用(2020年4期)2020-05-06
小学生学习指导(小军迷联盟)(2018年10期)2018-10-12
电子制作(2017年17期)2017-12-18
现代兵器(2017年4期)2017-06-02
制造业自动化(2017年2期)2017-03-20
凿岩机械气动工具(2016年1期)2016-11-11
同煤科技(2015年4期)2015-08-21