四自由度焊接机械手臂运动学建模与轨迹规划
2020-11-05 10:56孙银生贺艳娜田国豪
机械工程与自动化 2020年5期
孙银生,贺艳娜,田国豪
(1.郑州机械研究所有限公司,河南 郑州 450002;2.河南省理工中等专业学校,河南 郑州 450008)
0 引言
目前越来越多的机器人正在取代人工,机械手臂作为现代化生产线的重要组成部分,已被广泛应用于工件加工、货物搬运和产品组装等环节[1-3]。王浩等[4]通过对六自由度机器人进行运动学建模,采用样条插补法规划运动轨迹,并成功应用在叶轮加工中。严浩等[5]对SCARA机器人进行了分析,设计了预测型迭代学习控制器,大大提高了控制精度。乐健等[6]将机器人应用于焊接领域,通过模糊控制器算法实现了对焊缝的高精度跟踪,提高了焊接的质量和效率。然而,当前在简单工件的焊接作业中,大部分采用人工焊接为主,如果将这部分工作交给机器人完成,不仅会解放更多的劳动力,还会大大提高生产效率。为此,本文以SCARA型机器人为基础,研制了四自由度的自动焊接机械手臂,通过在计算机控制平台上对运行轨迹进行规划,在三维空间上实现了简单工件的自动焊接,且具有较高的焊接精度。
1 四自由度焊接机械手臂建模及控制系统
1.1 焊接机械手臂建模
在SCARA机器人的基础上,对焊接手臂进行了开发,四自由度焊接机械手臂主要由基座、立柱、伸展大臂和小臂、安装焊丝的管套以及输送焊丝的机构组成,其机械结构模型如图1所示。

图1 SCARA型四自由度焊接手臂机械结构模型
步进电机驱动伸展大臂和小臂上的从动轮,实现各关节的转动,完成在xy平面的定位;在z轴的移动则利用步进电机驱动杠丝转动,使大臂在立柱滑轨上做垂直方向的运动而实现[7-8]。同时,在机械手臂的末端固定了安装焊条的管套,在焊接的过程中,根据焊接的速度控制传送轮带动焊丝向管套外移动。
四自由度SCARA型焊接机械手臂由4个连杆串联组成,采用D-H(齐次变换矩阵)方法对机械手臂进行运动学建模,空间坐标系如图2所示。
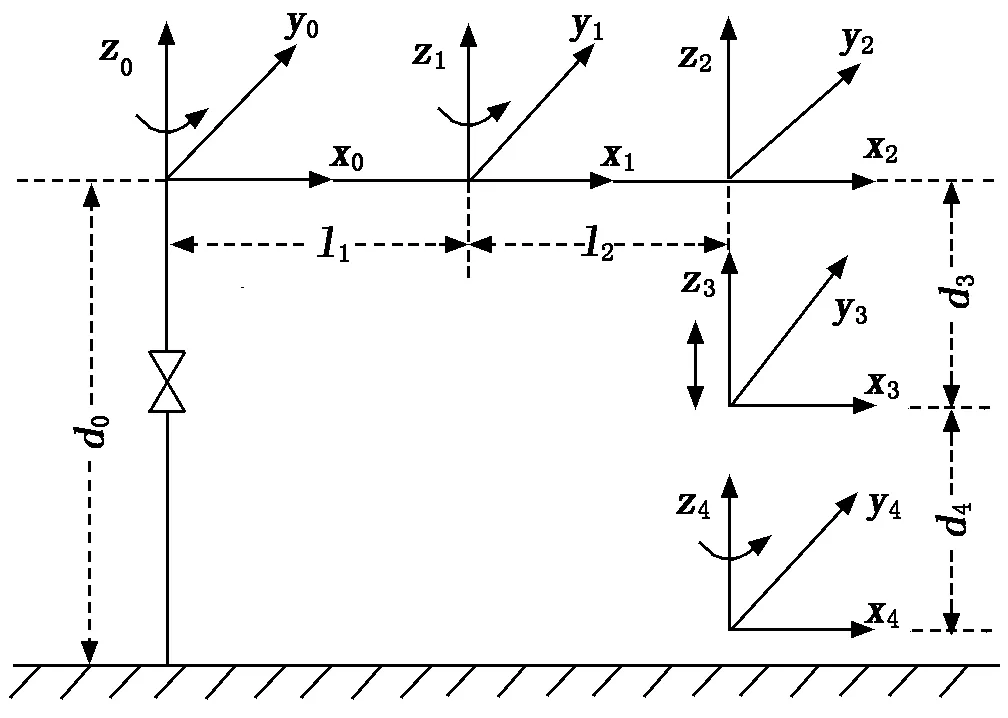
图2 焊接机械手臂空间坐标系
采用相邻两轴夹角αi、连杆的夹角θi、关节法线的距离li以及连杆间的相对位移di表示机械手臂的位姿,D-H参数如表1所示。

表1 焊接机械手臂D-H参数
任意相邻连杆坐标系之间的位置关系矩阵可以采用下式描述:
(1)
根据表1的已知参数,能够求出每个相邻连杆的位置矩阵:
其中:ci=cosθi;si=sinθi。
1.2 机械手臂控制系统
焊接手臂的控制系统主要由计算机控制平台和机械手臂控制板两部分组成,焊接手臂的控制系统结构框图如图3所示。
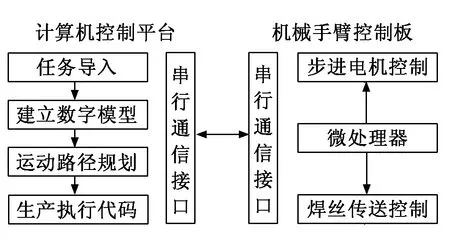
图3 焊接手臂的控制系统结构框图
利用计算机控制平台中MATLAB的Robotics Toolbox建模,并按照设计的D-H参数进行配置。首先将焊接任务导入平台,然后对任务进行数字建模,规划焊接路径,并对路径进行离散化处理,求解出各离散点的运动学解,得到各关节的旋转角度和速度等参数[9]。通过RS232串行通信接口将路径上各离散点的关节参数发送到机械手臂控制板上,微处理器根据收到的数据控制各关节的步进电机将机械手臂送到指定的空间位置。在焊接的过程中,还会根据焊接的速度控制焊丝的传送速度,从而完成整个焊接任务。
2 焊接机械手臂运动学分析
当已知机械手臂所有连杆的长度与关节角度状态时,可以在坐标系中方便地求解出末端执行器的位姿,这个过程称之为正运动学分析[10]。当已知末端执行器要到达的位态时,需要求解出每个连杆的参数,这个过程为求运动学的逆解[11]。
2.1 运动学正解
由于各连杆之间是串联的,所以正运动学的位置和姿态方程表示为:
[M0,4]=[M0,1][M1,2][M2,3][M3,4]=

(2)
其中:(px,py,pz)T为末端执行器的位置矢量;(ox,oy,oz)T为方位矢量;(nx,ny,nz)T为法向矢量;(ax,ay,az)T为接近矢量。
2.2 运动学逆解
运动学的逆解往往不唯一,连杆和关节的数量越多,逆解的数量也就越多。如果要求解大臂关节的旋转角度θ1,只需在式(2)的等号两侧分别左乘[M0,1]-1,可得到:
[M0,1]-1[M0,4]=[M0,1]-1[M0,1]·[M1,2]·[M2,3]·[M3,4].
(3)
将相邻连杆的位置矩阵以及式(2)代入式(3)得:
(4)
根据公式(4)能够得到θ1为:
(5)

令式(4)等号左侧矩阵中的第1行与第4列的数值相乘,并与等号右侧矩阵元素对应相等,即:
c1px+s1py-l1=l2c2.
(6)
变换后可得:
(7)
同理,令式(4)等号左侧矩阵的第3行与第4列的数值相等,并与等号右侧矩阵元素对应相等,即:
pz=-d3-d4.
(8)
同理,令式(4)等号左侧矩阵的第2行与第1列的数值相乘,并与等号右侧矩阵元素对应相等,即:
-s1nx+c1ny=s2c4+c2s4.
(9)
变换后可得:
θ4=arcsin(-nxsinθ1+nycosθ1)-θ2.
(10)
根据焊接机械手臂的结构,建立了运动学模型,利用各关节之间的几何关系,得到了机械手臂的运动学正解和逆解,为轨迹规划奠定了基础[12]。
3 运动轨迹规划
从逆解得到的结果可以看出:求解的连杆参数并不唯一,而且受机械手臂各连杆的参数限制,其工作的空间也受到了一定的限制,所以在控制各关节运动时,需要选择路径较短的最优方案[13-15]。对机械手臂的求逆解属于离散点运算,即计算从起始点PO到终点PD各关节的参数变化量,但实际上在焊接的作业中末端执行器(焊丝末端,即焊点)经过连续的轨迹,才能保证焊接的质量[16]。为此,本文提出了匀速离散点插补算法,将焊接的轨迹离散成多个点Qi(xi,yi,zi),离散点越多,规划的轨迹精度越高,通过控制各关节的参数,依次经过每个离散点,从而实现整个路径的规划。
假设在三维坐标空间中要完成一条直线的焊接,起点坐标为PO(xO,yO,zO),终点坐标为PD(xD,yD,zD),那么两点之间的距离LOD表示为:
(11)
如果焊丝末端的运动速度保持为v,令插补时间间隔为Tc,那么每个插补时间经过的距离d表示为v·Tc,可以计算出在这个行程中总的插补离散点数为ent[LOD/(v·Tc)]+1,故可得到每个插补点的位置坐标为:
(12)
其中:1≤i≤ent[LOD/(v·Tc)]+1。通过匀速离散点插补算法处理后,求解得到每个对应离散点的逆解,即各关节的参数,通过计算机控制平台的RS232接口传送给机械手臂控制板,微控制器会根据各关节旋转角度增量和位移增量的大小,通过给步进电机输送脉冲信号的个数和频率控制各关节运动到指定位置,能保证焊丝末端所经过的焊接路径为连续的。根据经验可知,插补的离散点数量适当的多一些,能够保证焊接过程更加平稳。
4 实验结果与分析
4.1 单点控制精度测试
为了验证本文研制的SCARA型四自由度焊接机械手臂的建模方式及运动学分析的可行性,对焊接机械手臂单点位置的控制精度进行了测试实验。首先在计算机控制平台利用MATLAB中的机器人工具箱对研制的SCARA型四自由度焊接机械手臂进行建模,具体参数如表2所示。
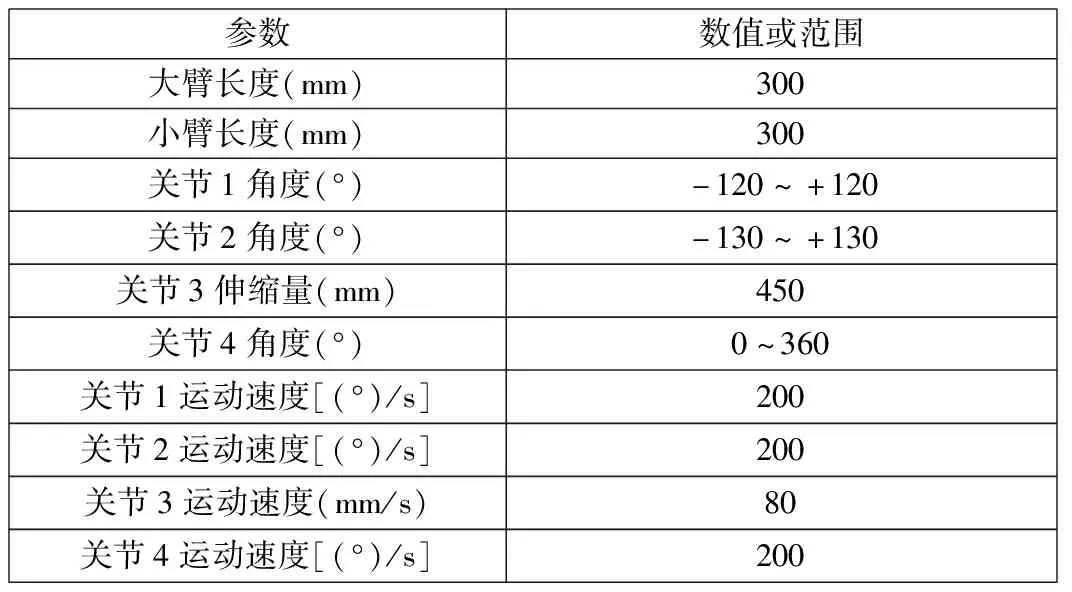
表2 焊接机械手臂的参数
在焊接机械手臂工作的三维空间内选取10个目标坐标点,并将这些点导入到机器人工具箱中,经过对这10个点求逆解,得到各关节的参数,并发送给机械手臂控制板执行,使焊丝末端运行到指定位置,并进行实际测量,得到10组数据,最后计算出目标与实际坐标的误差,结果如表3所示。

表3 精度控制实验结果
从表3的实验结果可看出:在得到的10组数据中,焊接机械手臂到达的实际坐标点与目标坐标均有一定的距离偏差,最小误差为0.39 mm,最大偏差为0.71 mm,平均误差仅为0.54 mm,说明设计的四自由度焊接机械手臂具有较高的控制精度。
4.2 运动状态跟踪
为了解焊接机械手臂在运动过程中各关节的运动状态,在三维空间内选取两点A(226,48,-283)和B(-63,390,-317),规划焊丝末端从A点运行到B点,跟踪各关节主要参数及焊点位移的变化情况,如图4和图5所示。

图4 各关节主要参数跟踪结果

图5 焊点的位移与时间关系
从图4的跟踪结果可看出:关节1和关节2的角速度和角加速度曲线均非常光滑,说明两个关节的运行非常平稳;关节3是焊丝传送部件,在z轴的垂直方向上运动,在传送结构的控制下保持了匀速的运动状态;关节4是末端执行器的状态控制部件,在本应用中未发挥作用,始终保持静止的状态,所以角速度一直为0。
从图5的跟踪结果可看出:焊点在x轴和y轴上的位移曲线也非常光滑,在z轴上则呈现出了标准的线性运动趋势,符合焊丝传送结构的设计预期。进一步说明了本文设计的四自由度焊接机械手臂在点到点的运动过程中运动连续平滑,不卡顿,各部件均工作正常。
5 结束语
本文基于SCARA型机器人研制了四自由度机械手臂的自动焊接系统,通过对机械手臂进行运动学建模和分析,得到了正解和逆解,将各关节参数发送给机械手臂控制板执行,可使末端执行器运行到指定的目标坐标点。通过匀速插补算法实现路径规划,实现在三维空间中对简单工件的焊接作业。通过对10组单点位置控制,验证设计的自动焊接系统对机械手臂具有较高的控制精度,平均误差仅为0.54 mm。通过对关节和焊点的运动状态进行跟踪,发现关节的角速度、角加速度和焊点的位移曲线非常光滑,说明了焊接机械手臂运行非常平稳;另外,在对两块铁板焊接的路径规划中,使用的匀速插补算法也保证了焊接轨迹的连续性,所以设计的四自由度机械手臂自动焊接系统符合设计预期,能够满足焊接的工艺要求。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
电焊机(2022年5期)2022-06-01
装备制造技术(2020年2期)2020-12-14
金属加工(热加工)(2020年9期)2020-11-04
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
金属加工(热加工)(2018年2期)2018-03-22
汽车实用技术(2017年16期)2017-09-21
海军航空大学学报(2015年1期)2015-11-11