飞秒激光电子激发标记测速方法及其在超声速射流中的试验验证
2020-11-10 11:15朱志峰李中山杨富荣
空气动力学学报 2020年5期
朱志峰, 李 博, 高 强, 李中山, 陈 爽, 陈 力, 杨富荣
(1. 天津大学 内燃机燃烧学国家重点实验室, 天津 300072; 2. 中国空气动力研究与发展中心, 绵阳 621000)
0 引 言
超声速及高超声速流场速度的精确测量对更深入地理解空气动力学[1]以及研发设计航空航天高性能推进系统都具有十分重要的意义。目前,对于流场速度的研究主要有两大类:基于探针的侵入式测量和基于激光的非侵入式测量。在超声速流场之中应用侵入式测量,对于探针的要求更加高,同时探针会破坏整个流场结构,造成测量结果的偏差,而基于激光技术的非侵入式方法在超声速环境下极具优势。
基于激光技术的测速方法大体可以分为两类:一是利用多普勒效应,包括激光多普勒测速(Laser Doppler Velocimetry,LDV)[2]、干涉瑞利散射(Interferometric Rayleigh Scattering, IRS)[3]及可调谐二极管激光吸收光谱(Tunable Diode Laser Absorption Spectroscopy, TDLAS)[4]等;二是通过记录示踪粒子在单位时间内的位移来实现测速,主要包括粒子成像测速(Particle Image Velocimetry,PIV)[5]和分子示踪测速(Molecular Tagging Velocimetry,MTV)[6]等。PIV技术需要在待测流场之中加入示踪粒子,示踪粒子的直径在微米量级。为了保证测量的精确性,示踪粒子要有良好的跟随性和散射性。然而,在超声速流场中,由于激波的厚度很小,激波面两侧流场的压力、温度和速度变化急剧,采用PIV测量超声速流场,其示踪粒子在经过激波面时,示踪粒子的跟随性可能存在问题[7-8]。MTV技术一般使用分子作为示踪粒子,所以MTV技术可以有效地避免示踪粒子的跟随性问题,提高测速的准确性,因此被广泛用于超声速及高超声速流场测量当中。Hsu[9]使用波长355 nm的激光光解NO2产生示踪分子NO,实现了对超声速欠膨胀射流速度的研究。目前,大多数MTV技术都需要两束激光,一束激光用来标记示踪粒子,称为测量过程的“写”过程,在流场中标记示踪粒子得到一条信号线;在一定的时间延迟之后,利用另一束激光将标记的示踪粒子显示出来,称为测量过程的“读”过程。目前,MTV技术常用的示踪分子有酮类[10]和金属分子[11]等,也可以直接利用流场中的分子,例如标记OH分子的HTV技术[12]、标记NO的VENOM技术[13]、标记O2的RELIEF技术[14]等。
飞秒激光电子激发标记(Femtosecond Laser Electronic Excitation Tagging, FLEET)[15]测速技术属于MTV技术。该技术将飞秒激光脉冲聚焦,聚焦的激光会光解和电离氮气分子产生氮原子,氮原子重新结合并产生处于激发态的氮分子,激发态的氮分子向低能态跃迁并辐射出长寿命的荧光,通过测量氮分子的荧光信号来获得速度信息。飞秒激光在空气中传播时,当激光能量密度超过阈值,由于非线性克尔效应,激光会出现自聚焦现象。当自聚焦的激光能量密度达到临界值时,空气发生多光子电离,形成具有散焦作用的等离子体,当克尔效应引起的自聚焦与等离子体导致的散焦达到动态平衡时,会形成直径在百微米量级的光丝[16],因此FLEET技术具有一维速度分布测量能力,且具有扩展到二维速度测量的潜力。
普林斯顿大学Richard B. Miles团队[17]开发了FLEET技术,并探究了该技术在空气流场进行速度测量的原理和可行性。之后,DeLuca[18]研究了激光能量对于荧光信号以及光丝直径的影响,同时研究了环境压力对信号光谱的影响。Danehy[19]使用FLEET技术测量了纯氮气流场速度的三个分量和加速度。Edwards[20-21]使用FLEET技术实现了流场速度和温度的同时测量。Zhang[22]通过向纯氮气流场中添加氩气来增强FLEET信号的强度,并研究了其增强机理。
国内对于FLEET技术以及其在超声速流场中的应用研究较少,因此本文针对该项技术展开研究,拟在一定程度上填补国内这方面研究的空白。研究同时使用波长266 nm的飞秒激光和激光瑞利散射技术对超声速拉瓦尔喷管速度场及其结构进行了测量,通过对超声速射流不同位置的速度测量结果的分析,验证FLEET测速方法在超声速流场速度测量方面的能力和应用于航空航天领域相关的超声速流场速度测量的潜力。
1 实验装置
1.1 超声速喷管
超声速喷管(拉瓦尔喷管)由收缩段和扩散段两部分组成,亚声速气流流经收缩段在喉部加速至声速,并在扩散段继续加速至所需要的马赫数[23],得到持续稳定的超声速自由射流。实验中使用的拉瓦尔喷管设计马赫数为1.8,喷管入口直径14 mm,喉道直径3.9 mm,出口直径4.68 mm,喷管出口压强0.1 MPa,气源温度300 K,气源压强0.7 MPa,实验气体为空气。
1.2 光路
FLEET测速实验使用的是钛蓝宝石飞秒激光器(Spitfire Ace, Spectra-Physics),激光器输出波长800 nm激光,经过三倍频THG(Third Harmonic Generation)产生波长266 nm的激光作为光源,波长266 nm激光经过500 mm的球面镜聚焦形成丝状等离子体,将等离子体置于喷管中心上方1 mm处进行实验。激光能量为340 μJ/pulse,激光脉宽为45 fs,激光频率为1000 Hz。实验装置如图1所示,上面光谱仪测量荧光信号的光谱,下面ICCD测量荧光信号的位移。光谱仪(Acton SP-2300i, Princeton Instruments)的光栅为300 grooves/mm,闪耀波长为300 nm,狭缝为300 μm; ICCD 相机(PI-MAX3:1024i, Princeton Instruments) 的分辨率为1024 pixel×1024 pixel,相机的门宽为100 ns,相机的时间延迟为(指从激光脉冲标记流场中的示踪分子到ICCD相机开门拍摄荧光信号的时间差)1 μs。
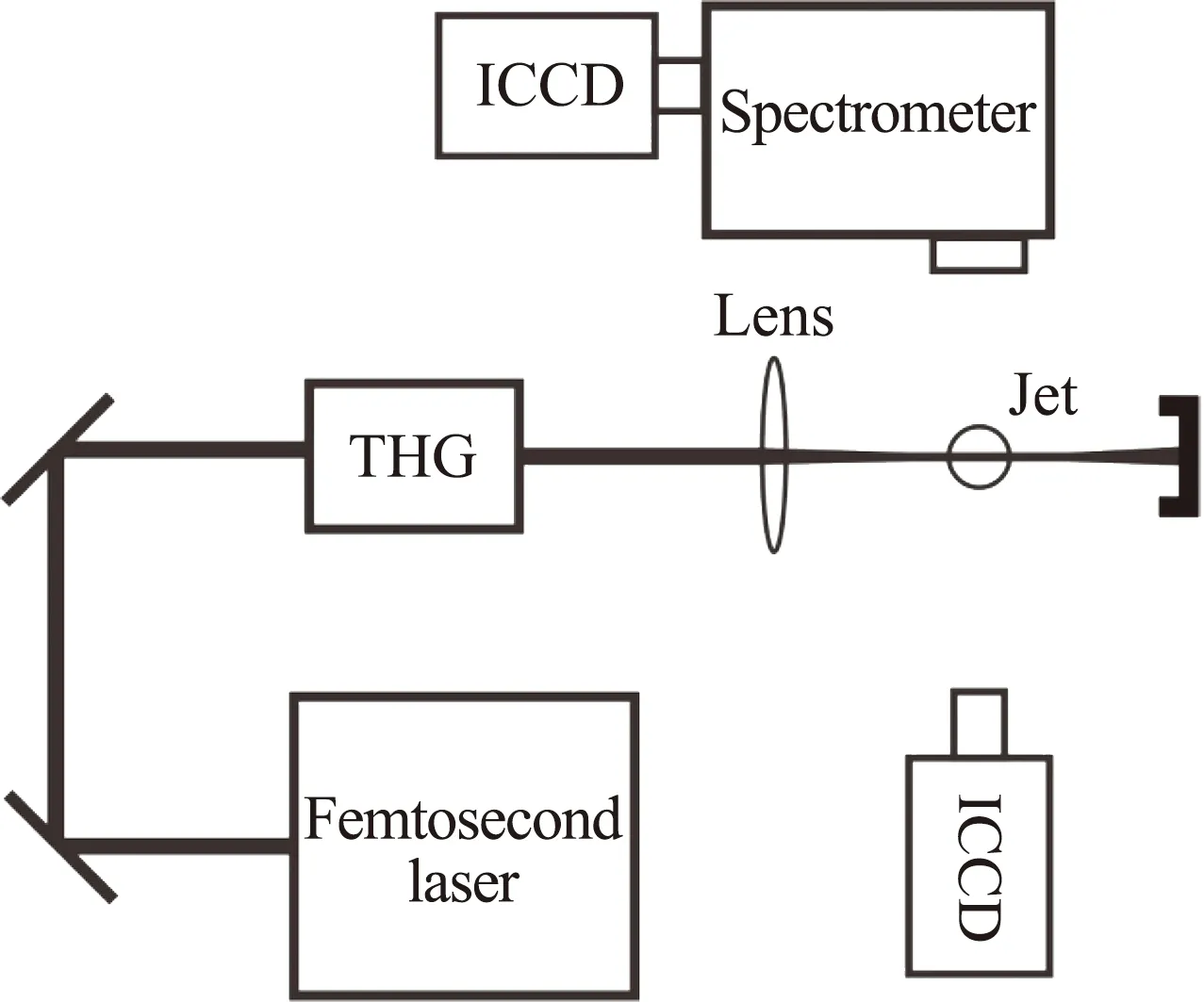
图1 实验装置 Fig.1 Experimental setup
首先,实验利用光谱仪测量了空气中FLEET信号的光谱,之后测量了超声速射流轴向中心线速度变化,测量了流场从距喷管1 mm到21 mm处中心的速度,每隔1 mm拍摄一次标记位置和时间延迟之后的图像。之后分别测量了流场不同位置(距离射流管中心点的径向距离x= 0 mm、0.5 mm、1 mm、1.5 mm)轴向速度变化和不同高度(距离射流管出口的轴向高度y=1.5 mm、4.0 mm、10.0 mm、13.5 mm、17.5 mm)的速度一维分布。最后控制时间延迟为1 μs进行流场二维轴向速度分布测量。由于飞秒激光聚焦形成的是一维丝状等离子体,测量得到的是流场的一维速度分布。因此在实验时,保持激光和相机位置不变,即激光标记示踪粒子的位置不变,用相机记录标记位置。利用步进电机控制喷管匀速向下移动,同时ICCD相机开始连续拍摄,一维等离子体将在流场轴向进行连续扫描拍摄,相机将得到连续的不同高度被标记示踪粒子1 μs延迟之后的荧光图像。喷管在步进电机的带动下向下走2 cm,ICCD相机正好拍200幅,得到超声速流场的轴向高度从1 mm到21 mm之间的时间延迟之后的图像,计算200幅图片的速度,按顺序排列得到超声速的二维轴向速度分布。
本文同时使用激光瑞利散射技术对超声速流场结构进行了测量。实验使用Nd: YAG(Brilliant b, Quantel)纳秒激光器作为实验光源。激光器输出的是波长532 nm的激光,激光能量为320 mJ/pulse,频率为10 Hz,激光脉宽为5 ns。实验装置和图1类似,只是将波长532 nm激光扩束后聚焦成宽3 cm的激光片,激光片在垂直喷管出口上方,距出口中心3 mm。
1.3 信号光谱
图2是在空气中测量的FLEET信号的光谱图。横坐标是波长,纵坐标是信号强度,从图中可以看到氮分子跃迁产生的荧光的谱线,其中N2(C3Пu)→N2(B3Пg)产生的荧光寿命较短,这一部分光谱可以用来研究温度或者其它流场特性[20-21]。而N2(B3Пg)→N2(A3Σu+)产生的荧光寿命很长[24],可以用于速度测量。
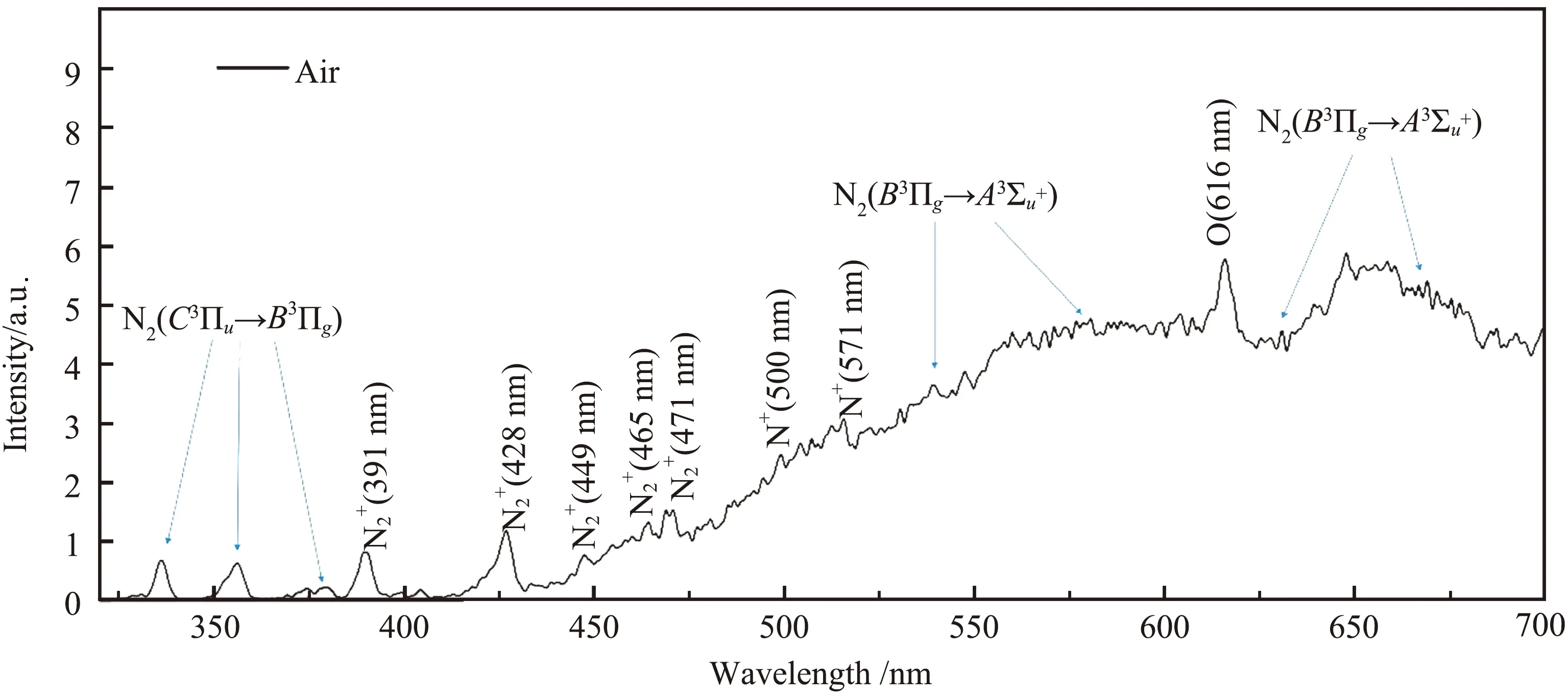
图2 空气中FLEET信号的光谱Fig.2 FLEET spectra in air flow
2 实验结果
2.1 中心线速度
FLEET技术所测速度代表的是固定时间内位移的平均速度,本质上是利用极短时间的平均速度来代替瞬时速度,因此时间延迟越短,测量结果越接近瞬时速度。但延迟时间要根据流场的速度确定,需保证在设定的的延迟时间内,信号走过的位移在ICCD上可以区分。图3是超声速流场不同高度在不同时间延迟后的荧光图像,图3(a)时间延迟是1 μs,图3(b)时间延迟是2 μs。两者都可以在空间上分辨出荧光信号的位移,并计算出流场的速度。但时间延迟为1 μs的信号强度要比时间延迟2 μs要强,信噪比更好。为了更精确的测量瞬时速度,以下实验的延迟时间均采用1 μs。
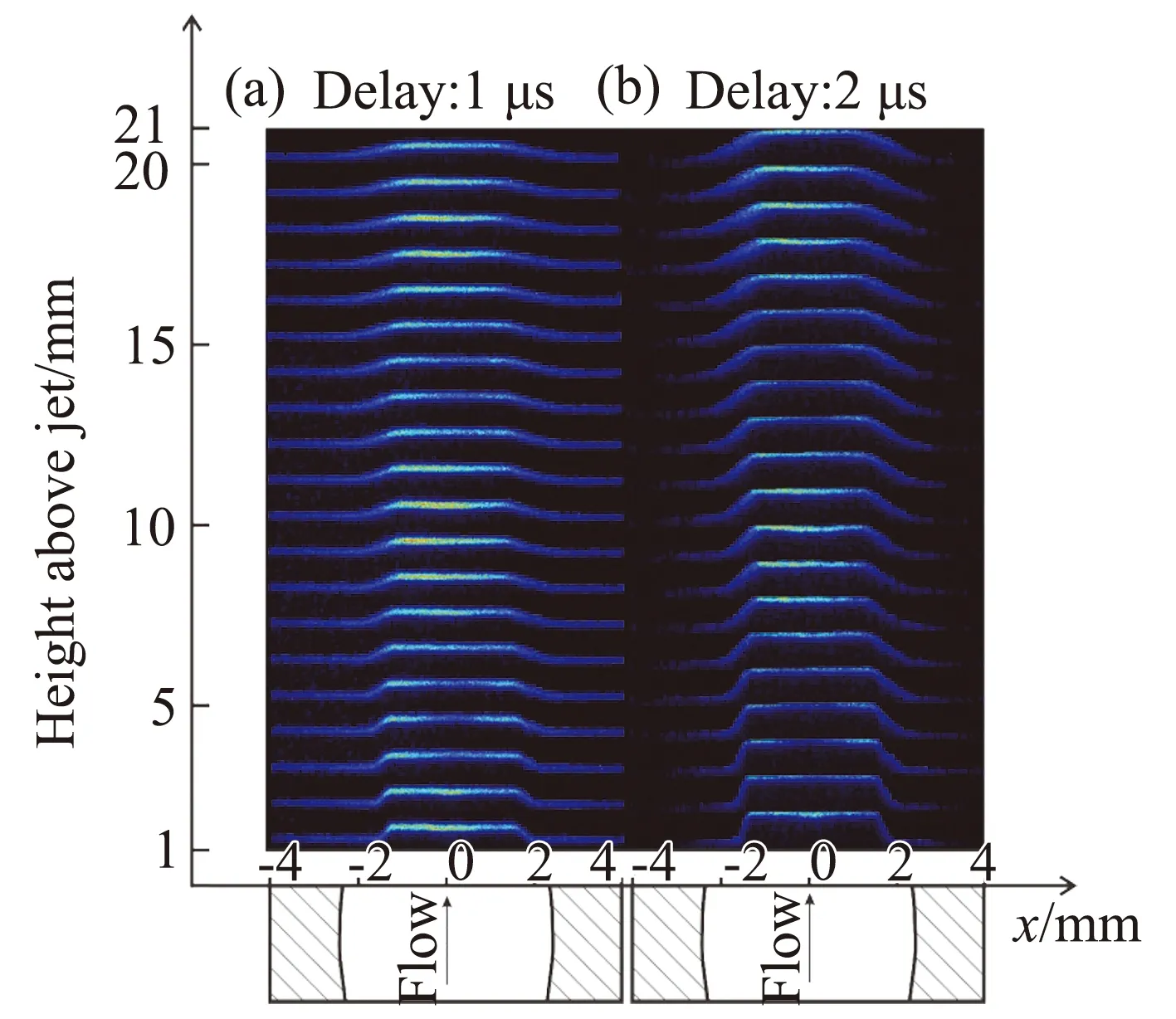
图3 不同时间延迟的测量信号Fig.3 Signals in different time delays
对于超声速自由射流,轴向方向中心线的速度变化能够在一定程度反映流场的性质。图4是超声速流场结构以及中心线速度的测量结果。图4(a)使用纹影法测量得到的流场的全局结构图,图4(b)是使用干涉瑞利散射技术(IRS)测量得到的流场中心线的速度,使用的拉瓦尔喷管和实验条件和本文相同,更加详细的内容可以从文献[25]中得到。在此基础之上,本文使用瑞利散射技术和FLEET技术对超声速流场出口局部区域进行了研究。在进行瑞利散射实验时,激光越靠近喷管,产生的杂散光干扰越强。为了减小干扰,将激光片下边沿置于喷管上方3 mm处测量,得到流场高度3 mm到33 mm的结构。图4(c)是瑞利散射技术单次测量得到的流场的结构图,图4(d)是瑞利散射技术100次测量叠加得到的流场的结构图,从图中可以看到流场的结构。流场上部产生了很强的信号,这是因为超声速流场温度的降低造成环境中水的液化,产生很强的瑞利信号,该信号会对流场结构的测量产生干扰;该流场中间还产生了两个相互重叠的钻石型激波,造成这种不同于传统的超声速激波结构主要有两个原因:1)在喷管出口边缘,气流的膨胀扩张会因环境背压迫使气流向内运动,而气流在离开喷管时会有一个径向向外的速度分量,这个速度分量会因压力作用转变向内;2)喷管尖锐的喉部会在喷管内部形成一个独立的斜激波,这两种因素的共同作用形成了两个相互重叠的钻石型激波[26]。图4(e)是使用FLEET技术测量的流场中心线的速度,高度从1 mm到21 mm。随着高度的增加,速度先变小之后逐渐变大,当高度到达4 mm左右,速度达到第一个极大值处,之后速度迅速下降,然后速度达到极小值处后迅速上升,这样振荡传播下去,在传播过程中速度振荡幅度是减小的。
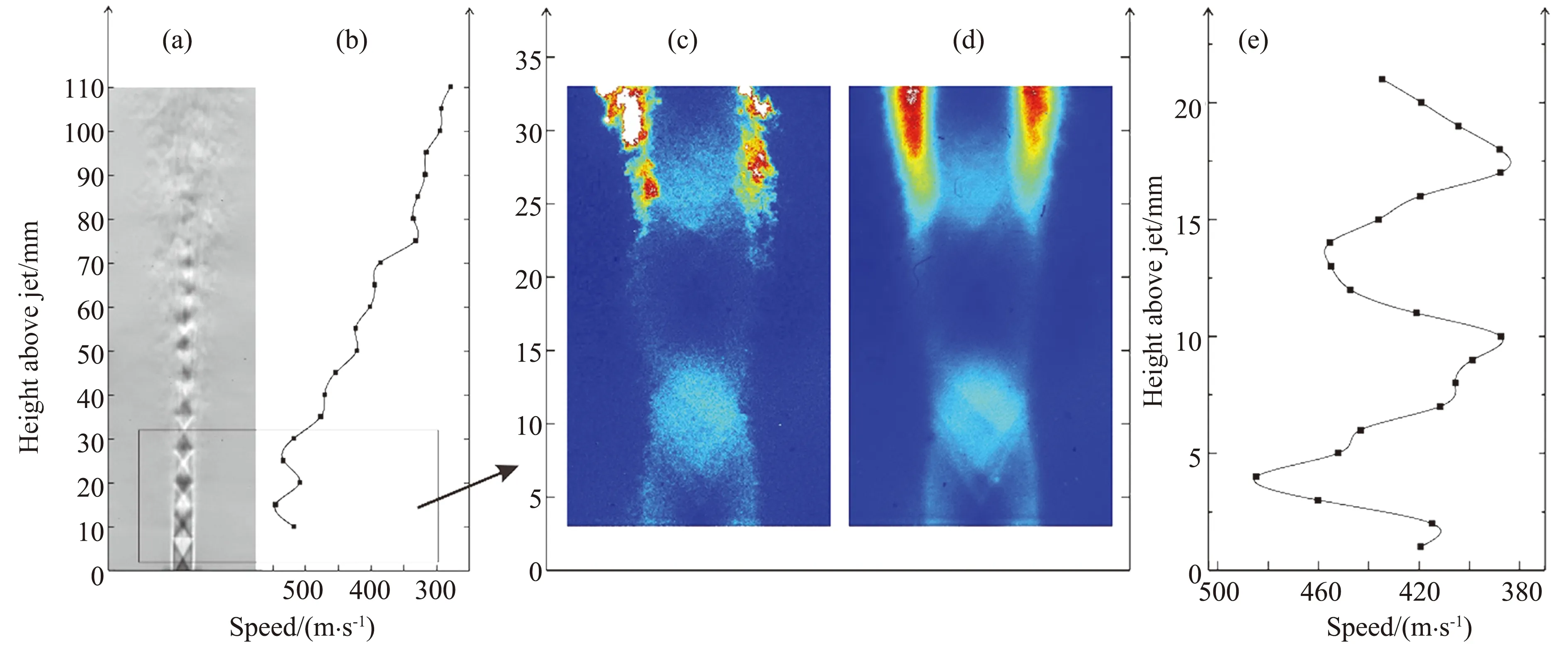
(a) 纹影法测量的流场结构;(b) 干涉瑞利散射测量的中心线速度;(c) 瑞利散射技术测量的流场结构(单次测量);(d) 瑞利散射技术测量的流场结构(100次叠加);(e) FLEET技术测量的中心线速度图4 超声速流场结构和中心线速度Fig.4 Structure and centerline velocity of supersonic flow field
2.2 轴向速度变化和不同轴向高度y的一维速度分布
图5(a)为超声速射流在不同径向位置的轴向方向的速度变化,横坐标为距射流管出口的轴向高度,纵坐标为流场速度,x为距离射流管中心点的径向距离,x=0处是喷管中心,流场在轴向方向是轴对称的,所以只展示了流场一侧的速度信息。图5(b)为瑞利散射测量的流场结构,黑线对应图5(a)中不同径向位置x在流场中的位置。从图中可以看出:在这几个位置的速度曲线波动趋势是相同的,速度都是上下振荡的。同时从图中还可以发现不同位置速度振荡的幅度不同,中心线的速度变化幅度最大。速度的振荡主要是因为流场中激波的振荡,速度振荡的幅度主要是由激波的强度所决定的[27]。
为了了解流场在不同高度一维速度分布,测量了中心线到达极值处高度流场的一维速度分布。图6(a)是流场在不同轴向高度的一维速度分布。横坐标为射流管出口径向位置,0处为喷管出口正中心,纵坐标是速度,y为距离射流管出口的轴向高度。图6(b)为瑞利散射测量的流场结构,黑线对应图6(a)中不同轴向高度y在流场中的位置。从图中可以看出:在径向位置-2 mm和2 mm附近均出现了剧烈的速度变化,该地方为流场的剪切层,内部为流场的高速区域,高速区域的宽度在不同高度出现变化,这是因为流场在不断重复地进行压缩和膨胀过程。在高度为4.0 mm和13.5 mm处的高速区域,速度沿径向位置增大方向先变大后变小,在高度为1.5 mm、10.0 mm、17.5 mm处的高速区域,速度先变小后变大,均在中心附近达到极值。
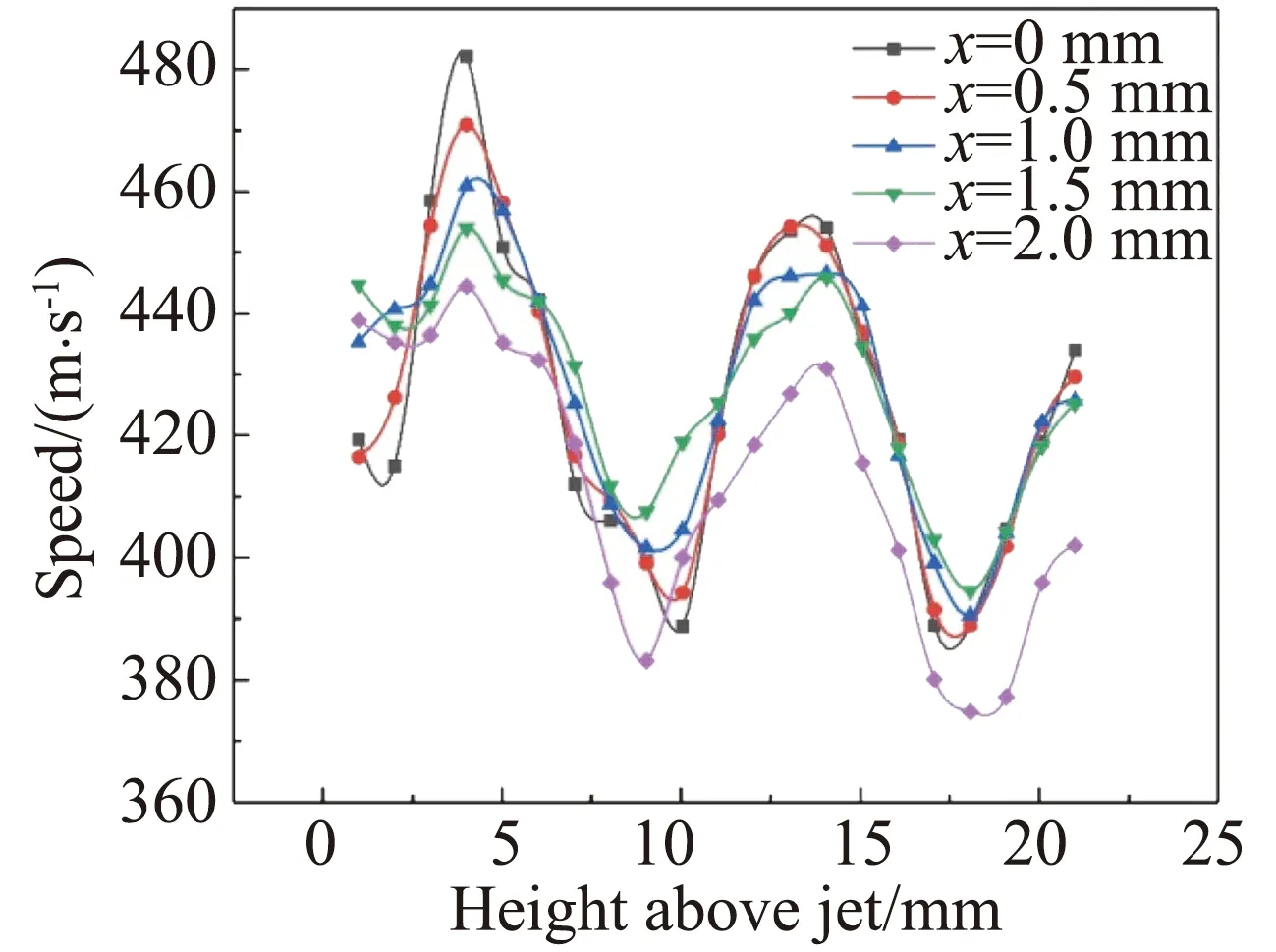
(a) 轴向速度变化
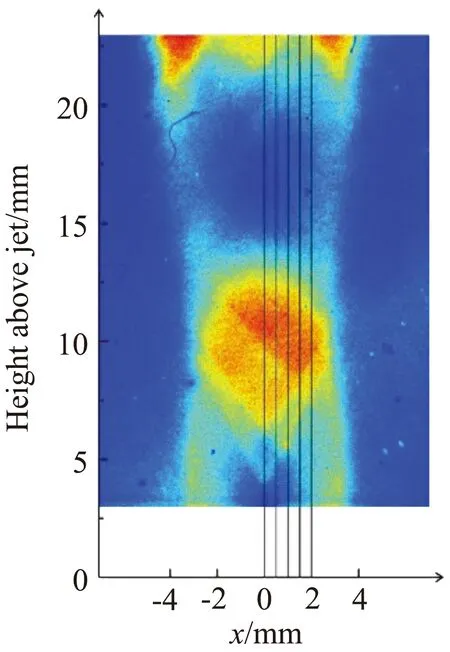
(b) 径向位置x
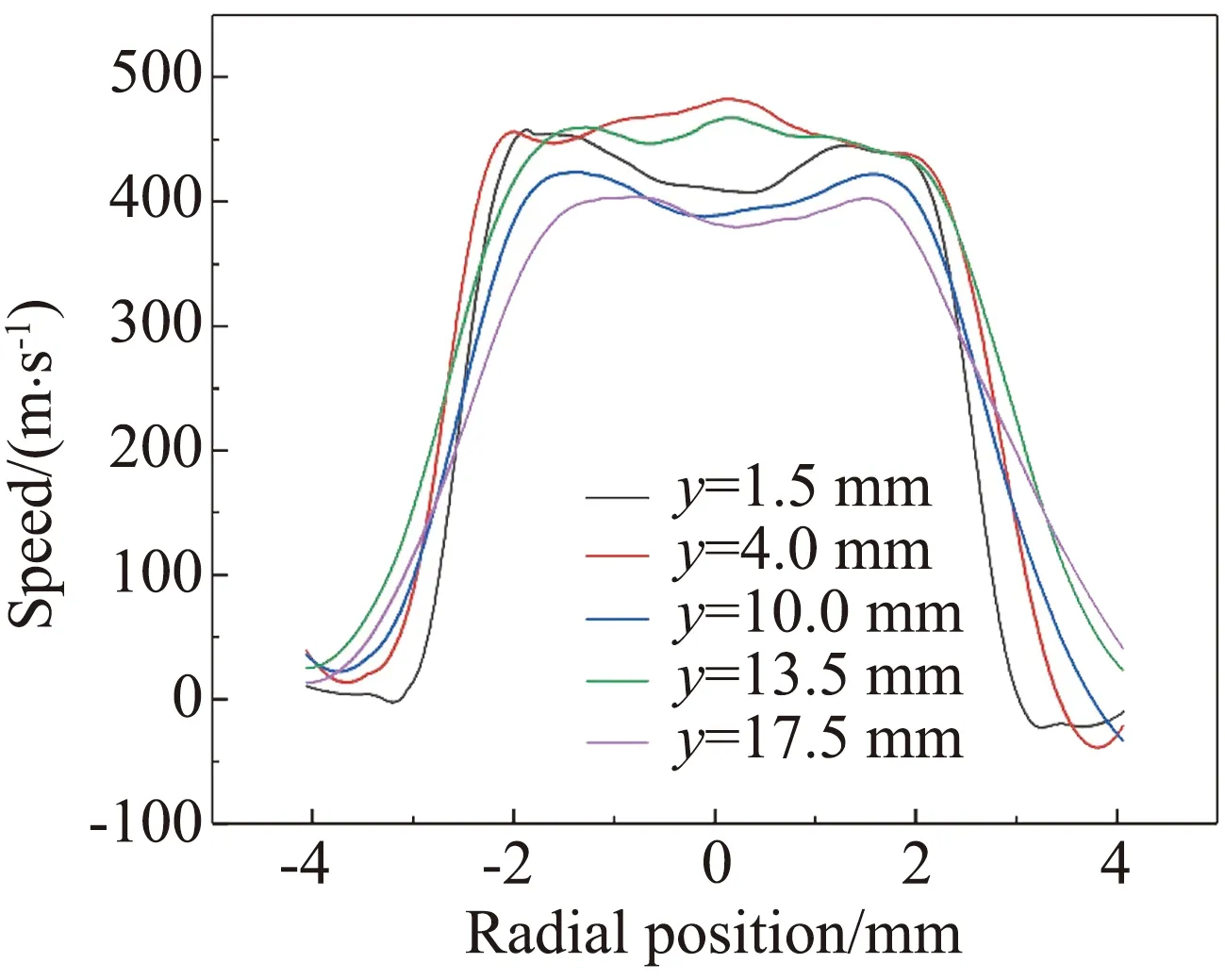
(a) 一维速度分布
(b) 轴向高度y
2.3 二维轴向速度分布及测量误差
在上述实验的基础上,对流场的二维轴向速度分布进行了测量。图7是超声速流场的二维轴向速度场,整体上速度沿轴向方向呈现上下振荡。图8为超声速流场轴向速度的二维分布轮廓图,该图像的分辨率为12.5 μm×100 μm,横坐标为射流管出口的径向位置,纵坐标为距离射流管出口的轴向高度。从图中可以清晰地看到流场的剪切层,随着高度的增加出现宽度的变大变小振荡。同时流场与外部空气相互作用使整个流场逐渐变宽,而流场的高速区域逐渐减小。
图7 超声速流场二维轴向速度场Fig.7 Two-dimensional axial velocity profile of supersonic flow field
图8 超声速流场轴向速度的二维分布Fig.8 Axial velocity contour of supersonic flow field
速度测量的测量精度是十分重要的。FLEET技术的测量精度主要被三种因素影响:信号线轮廓的物理尺寸、信号探测系统的光学分辨率,以及信噪比[28]。对于飞秒激光聚焦产生的丝状等离子体,测量得到的FLEET线包含二维强度分布,精确的位移测量需要找到该线各个位置的中心。信号探测系统的光学分辨率及信噪比都会影响到对信号线轮廓的提取,影响到测量位移的精度,这也就是应用FLEET技术进行测量时,需要用适当的时间延迟得到良好的信噪比从而会提高测量精度的原因。
本次实验的测量误差主要来源于位移S和时间t,对于误差估计时可以用下面公式(1)进行计算:

(1)
在实验中,位移的误差主要由标记位置和荧光信号位置的误差组成,造成两者误差的来源相似,主要来源于测量的随机误差和之后利用计算机程序提取信号位置的误差。在进行二维轴向速度场重建的过程之中,先确定激光的标记位置,之后连续单次拍摄不同位置荧光信号,因此,在位移误差估计时,本实验用标记过程的误差来评价拍摄荧光信号过程的误差。
标记过程的随机误差通过测量50次标记位置计算得到。图9展示的是标记线在各个位置的单次测量误差,横坐标为标记线对应射流管出口的径向位置,纵坐标为误差,误差平均值为2.3 pixel,所以认为成像信号位置的误差为2.3 pixel;标记过程的误差可以通过多次测量用算术平均值表示来减小,50次测量之后的误差是0.3 pixel,所以位移的最大误差为2.6 pixel。由于实验过程中稳定的激光以及相机系统精确的时间控制,可以认为实验过程之中没有时间误差。结合公式(1)可以得到速度的最大误差为32.5 m/s。
图9 标记线的单次测量误差Fig.9 Single measurement error of the tagging line
3 结 论
本文对飞秒激光电子激发标记测速方法进行了研究,并成功应用于超声速流场中,测量得到了流场的中心线速度变化,以及流场不同位置的一维和二维轴向速度变化,表明了飞秒激光电子激发标记测速方法在超声速流场速度测量方面的能力,同时相较于其它的MTV技术,该技术在使用时只需要一束激光,可以简化实验装置,有潜力应用于航空航天领域相关的超声速流场速度测量之中。
该项研究在国内开展较少,在丰富国内这方面研究的同时,还存在以下问题:1)本文重建流场的二维轴向速度分布的最大误差是32.5 m/s,主要是在图像处理提取信号位置过程中造成的,因此实验过程中的信号的信噪比、信号探测系统的光学分辨率以及提取信号轮廓的过程均会对测量结果的精确性造成影响,进一步提高测量的精度需要在这些方面改进。2)该技术测量的信号中包含径向速度信息,由于很难将移动前后的信号精确关联起来,因此径向速度的获取是该技术急需解决的一个难题。分析图3中不同时间延迟信号长度变化的趋势,有希望将移动前后的信号的某些特殊点关联起来,这是该技术获取流场径向速度的一种思路,也是在未来工作中需要认真讨论和研究的。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
航空兵器(2022年4期)2022-10-11
农业工程学报(2022年12期)2022-09-09
舰船科学技术(2022年11期)2022-07-15
军民两用技术与产品(2022年2期)2022-06-01
煤气与热力(2022年4期)2022-05-23
凤凰动漫(军事大王)(2022年1期)2022-04-19
中国新通信(2022年3期)2022-04-11
汽车工程师(2021年11期)2021-12-21
北京航空航天大学学报(2021年6期)2021-07-20