
基于ADAMS的双横臂式独立悬架仿真与优化
2020-11-12 02:14李江范禅金赵化刚
汽车实用技术 2020年19期
李江 范禅金 赵化刚


摘 要:悬架采用双横臂式独立悬架结构,主要设计要点是四连杆硬点布置,只有最优的双横臂布置,才能得到最优的悬架系统,使整车在行驶过程中产生最小的轮胎磨损,提高整车的横向稳定性。文章在ADAMS View建立了独立悬架参数化模型,通过设定设计变量,设定目标函数,对目标值求最优解,最终仿真优化出最优的悬架硬点布置。通过仿真结果表明:优化后的结果较初定的四连杆机构有很大的改善。
關键词:独立悬架;四连杆;ADAMS;参数化;仿真分析
中图分类号:U463.4 文献标示码:A 文章编号:1671-7988(2020)19-62-03
Simulation and Optimization of Double Wishbone Suspension Based on ADAMS
Li Jiang, Fan Shanjin, Zhao Huagang
( Shaanxi Heavy Duty Automobile Co, Ltd, Shaanxi Xi'an 710200 )
Abstract: The suspension adopts a double-wishbone independent suspension structure. The main design point is the layout of the four-link mechanism. Only the optimal double-wishbone layout can obtain the optimal suspension system, which minimizes the entire vehicle during driving. Tire wear improves the lateral stability of the vehicle. In this paper, a parametric model of independent suspension is established in ADAMS View. By setting design variables, setting objective function, and finding the optimal solution to the target value, the simulation optimizes the optimal suspension hard point arrangement. The simulation results show that the optimized results are greatly improved.
Keywords: Independent suspension; Four-bar linkage; ADAMS; Parametric model; Simulation analysis
CLC NO.: U463.4 Document Code: A Article ID: 1671-7988(2020)19-62-03
引言
商用车车型的整车布置尺寸受国家法规的限制,基于现有刚性桥的结构,不更改车轮结构的前提下,先确定双横臂悬架四连杆机构的外点,再根据车架特点,初步设定内点坐标。通过ADAMS建立四连杆机构的长度作为设计变量,将轮胎上下跳动过程中的接地点距初始接地点的X向变量设置为目标函数,对四连杆机构的坐标进行参数化并对其进行优化仿真,最终得出目标函数最小值得最优解。获得最优的四连杆机构布置。
1 双横臂独立悬架特点及关键几何参数
1.1 双横臂独立悬架特点
独立悬架和非独立悬架的特点如表1所示。
1.2 双横臂独立悬架关键几何参数及影响
目前应用的双横臂独立悬架都是非等长双横臂式独立悬架。如图1所示,只要适当地选择上、下横臂的长度、α、β、σ等角度以及c、d等尺寸,就可以获得需要的侧倾中心位置和轮距、车轮定位参数等的有利变化规律,保证有良好的性能。
确定适当的上、下横臂的相对长度和角度应最先保证以下四个要求得到满足。
(1)当车轮随悬架上、下跳动时,使车轮外倾角的变化应较小,以减小轮胎的磨损和获得良好的稳定直线行驶能力;
(2)当汽车转向、车身发生侧倾时,尽可能避免使外侧车轮出现正的外倾角,使内侧车轮尽可能保持与地面垂直,这有利于操纵稳定性。
应当指出:(1)和(2)的要求相互矛盾,一般需要在上述两个要求之间做适当的折中。
(3)使两侧车轮同步上、下跳动时轮距的变化尽可能小。但悬架压缩、伸长时,轮距变化小就意味着悬架的侧倾中心低,不利于减小转向时的侧倾角。因此,过小的轮距变化不一定总有利,有时需要有适当的轮距变化。
(4)有利于整车布置。上、下横臂长度及各夹角的参数确定必须满足整车布置的需求。
2 基于ADAMS建模与仿真优化
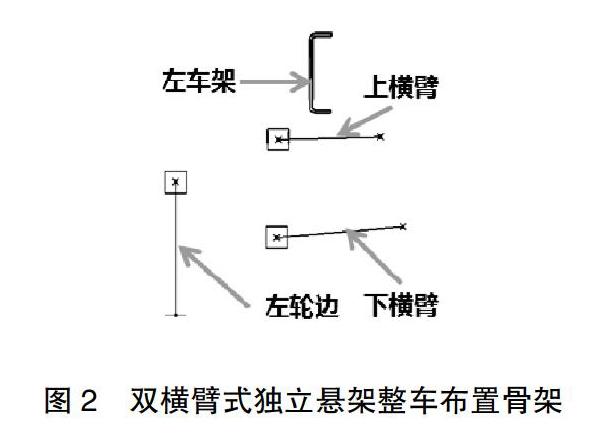
2.1 双横臂独立悬架应用的整车布置
商用车车型的整车布置和乘用车不同,主要受车轮结构、整车宽度、车架等因素的影响。本次应用的整车采用双横臂
式独立悬架。整车布置的结构骨架如图2所示。
2.2 双横臂独立悬硬点参数初值确定
根据该车型的承载选用成熟产品车轮结构作为独立悬架的车轮,设置左轮胎的中心接地点为坐标原点O(0,0,0),根据车轮的结构、独立悬架结构特点,整车质心高度及悬架动挠度要求,建立从车辆后方看向车辆行驶方向坐标系,X正向为向右,Y向正向为向上。由以上影响因素确定四连杆的初始坐标值。
2.3 ADAMS View建模
根据2.2确定的参数,在ADAMS View中建立坐标,并创建机构,添加约束,建立仿真分析,给轮胎接地点施加力,力的变化STEP变化函数如公式(1)所示,建立的仿真分析模型如图3所示。
STEP(time,0,0,8,travel)+STEP(time,8,0,24,-3travel) (1)
2.4 创建设计变量
根据四连杆机构原理,设上臂长度AB、下臂长度DC、桥上下臂铰接距离BC和上下臂铰接点连线的夹角σ为设计变量。在ADAMS中创建设计变量,DV_AB、DV_CD、DV_BC、 DV_b,并对设计变量赋予优化范围,可以是±偏差,也可以是最大值到最小值。
2.5 创建目标函数
满足1.2的(1)和(2)需要设置一个初始的车轮外倾角σ,设置了σ的变化范围在0.5~0.8的前提下,在优化过程中,轮距变化越小,则轮胎磨损越小,悬架操稳性越好,所以将轮胎接地点0在运动过程中距离坐标原点X方向的变化量设置为目标函数,目标函数如式(2)所示。
2.6 创建约束方程
根据1.2中描述,需要满足以下几个方程:
DV_AB- DV_CD<0 (3)
0.5<σ<0.8 (4)
將以上方程在ADAMS中依次创建测量函数和约束方程。
2.7 机构参数化
根据四连杆机构的模型及各硬点受整车布置的限制,将四连杆机构的坐标参数化方程按照表2输入到ADAMS中。
2.8 ADAMS机构运动仿真
四连杆机构参数化设计完成后,就可以进行仿真设置了。
以上、下横臂长度(DV_AB/DV_CD)、车轮上、下横臂铰接点连线长度(DV_BC)、车轮外倾角(DV_b)为设计变量,以2.6条件(OPT_CONSTRATINT_1/2)为约束条件,以轮胎接地点X向位移量(MEA_PT2PT_)的测量值的最大值作为目标函数求解,运动仿真设置如图4所示,设置完成后按<开始>键即可进行四连杆机构优化。
2.9 ADAMS优化计算
机构运动仿真结果如图5所示,四连杆长度和外倾角优化后的结果如图6~图7所示。由以下可以看出,优化后的轮距变化由15.5减小到了8mm,车轮外倾角初始值设定为0.77°。
3 结论
本文基于独立悬架设计理论,运用ADAMS软件进行仿真优化四连杆,最终得到合理的四连杆独立悬架,提高了车辆的稳定性,减少了轮胎磨损。
文中ADAMS的优化方法是在ADAMS View中进行,运用参数化机构,限定约束条件,建立运动仿真,通过ADAMS强大的仿真优化计算,获得目标函数最小值,最终得到最优的四连杆机构,该方法大大缩短了设计周期,并对后续类似的四连杆机构优化设计具有一定的借鉴作用。
参考文献
[1] 王霄锋.汽车悬架和转向系统设计[M].北京:清华大学出版社,2015: 14-18.
[2] 赵武云,史曾录.ADAMS 2013基础与应用实例教程[M].北京:清华大学出版社,2015:234-250.
[3] 陈家瑞.汽车构造[M].北京:机械工业出版社,2016:199-224.
[4] 梁荣朝,史松源.双横臂独立悬架轮距变化量的计算与分析[J].北京汽车,2016.
猜你喜欢
科技创新导报(2016年25期)2017-03-13
中国科技纵横(2017年1期)2017-03-10
科学与财富(2016年18期)2016-12-22
汽车科技(2016年6期)2016-12-19
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年15期)2016-06-30
哈尔滨理工大学学报(2016年1期)2016-05-31
