
四驱电动汽车线性约束下的驱动力分配方法
2020-11-12 02:14刘月娟
汽车实用技术 2020年19期
刘月娟

摘 要:基于电动汽车四轮独立可控的特性,以车辆的横摆角速度、质心侧偏角、前进速度等关键指标作为被控对象,提出了一种附加线性约束的驱动力分配方法,配合模糊PID控制器实现了车辆的稳定控制。通过simulink仿真实验验证了该策略的有效性。
关键词:电动汽车;驱动力分配;线性约束;控制
中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2020)19-133-04
The Distribution Method of Driving Force for Four-wheel Drive Electric
Vehicle with Linear Constraints
Liu Yuejuan
( Qingdao Vocational and Technical College, Shandong Qingdao 266000 )
Abstract: Based on the four-wheel independent and controllable characteristics of electric vehicle, a driving force distribut -ion method with additional linear constraints is proposed with the key indexes such as yaw rate, sideslip angle of mass center and forward speed of vehicle as the controlled object. The vehicle stability control is realized with the help of fuzzy PID controller. The effectiveness of the strategy is verified by Simulink simulation experiment.
Keywords: Electric vehicle; Driving force distribution; Linear constraint; Control
CLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2020)19-133-04
前言
自19世紀首次出现电动车以来,经过200多年的发展,四轮驱动的电动汽车技术有了长足的发展。随着电控技术、电池技术、轮毂电机等技术的不断发展,四轮电动汽车行业前景越来越明朗。由于其四轮驱动力独立可控的特性,使得面向电动汽车的控制系统成为了研究热点,这其中直接横摆力矩控制占据了主流,多数控制研究均是基于该方法开展的,如针对转向稳定性的控制研究[1],针对横摆角速度稳定性的控制研究[2]等,在稳定性控制器设计方面,基于PID的控制被广泛采用[3],也有滑模变结构控制[4]等方法引入控制系统;在驱动力分配研究方面,文献[5]使用了BP神经网络和PID混合的方式,验证了以操纵稳定性为目标的动力分配方法,文献[6]把汽车在加减速等各种不同工况下电机失效的情况考虑其中,以稳定性控制作为优化指标,实现了一种各轮独立驱动转矩分配策略。以上这些控制策略编程实现起来较为复杂,运算量大对控制器性能要求较高,本文在综合考虑控制稳定性和降低控制器运算量的前提下,设计了基于线性约束的动力分配方法,并采用了模糊PID控制进行了仿真。
1 四轮驱动系统总体设计
1.1 系统整体设计
车辆动力学模型各个参量的定义如图1所示。
四驱电动汽车驱动控制系统整体设计框图,如下图2所示。
由以上整体框图可见,系统的控制部分主要是围绕前进速度v,质心侧偏角β、横摆角速度γ这三者进行的。
这些控制器均为偏差控制器,在实际的物理信号与期望的值产生偏差之后,才能产生控制量。因此构造控制器的第一步就是要明确偏差信号的值,对于速度控制器来说,获取偏差较为容易,期望速度正比于驾驶员给出的油门控制量,实际速度可由轮胎转速测量单元得到;对于横摆角速度β和质心侧偏角β,其期望值的产生一般需要借助动力学模型[7]进行计算,而车辆实际的横摆角速度可以由单轴陀螺仪经滤波后获得,车辆的实际质心侧偏角需要由多传感器数据融合算法得出[8]。一旦获取了偏差信号,控制器即可给出附加纵向力Fvx,附加侧向力Fvy,附加横摆力矩Mγ。
附加线性约束的驱动力分配计算方法
对于横摆力矩Mγ,与4个轮胎纵向力的关系如下式所示:
(1)
上式中,Fxi(i=1~4)为四个轮胎的纵向力,δ为前轮转角,lf为前后轮半间距。
对于车辆的侧向速度vy,与之相关联的轮胎纵向力主要集中在2个前轮:(2)
式中,各个物理量的意义同前所述。
在驾驶员油门指令保持不变的情况下,欲使维持车辆的前进速度不变,(也即纵向加速度ax=0),仅依赖以上两式(1)(2)的约束是无法达成的,为了保证 =0,还需再施加一个车辆纵向(前进方向)的合力平衡约束条件,可用下式来描述:
(3)
式中,令纵向加速度 =0,Fyi为轮胎侧偏力,其计算方法可参考文献[9]。
在式子(1)~(3)的共同约束下,所求解出的四轮驱动力Fx1、Fx2、Fx3、Fx4就能满足对横摆角γ、侧向速度Vy的控制需求,同时还可使得车辆前进速度保持稳定;为了使求解过程中构建的方程组系数矩阵满秩(求解出四轮驱动力的唯一性),还需至少附加一个条件,简单起见,以左转弯(δ >0)线性约束为例:(4)
式(4)中,kh为转弯比例系数,一般该值的取值时要满足,其意义是车辆左转弯时,左轮的驱动力Fx3要小于右轮的驱动力Fx4。至此,构造的四轮驱动力分配算法可整理为以下矩阵方程,以便于编程解算:
(5)
2 模糊PID控制器设计
2.1 模糊PID控制器的整体设计
以侧向速度Vy的控制为例,使用位置式PID的方法。位置式PID控制的计算公式如下:(6)
式(6)中,kp、ki、kd为PID系数;evy—Vy的偏差信号;Fvy—调整Vy的控制量。
至于横摆角速度的控制、前进速度的控制,具有与侧向速度控制完全类似的结构,不再赘述。
欲使用模糊PID,一般来说需要先在单纯使用PID,通过调参将被控对象控制稳定以后,把这组参数进行记录,作为基础参数kp0、ki0、kd0;然后通过增加一个串行/并行的模糊控制器,由模糊控制器实时产生参数变化量△kp、△ki、△kd,将其分别叠加到原PID控制器的三个系数kp0、ki0、kd0中,如此便实现了PID控制器的系数的自适应变化。可见,设计模糊控制器的设计目标在于如何生成合理的参数变化量。
图3为Vy的模糊PID控制器的simulink模型。
2.2 模糊PID控制器设计步骤
模糊PID控制器主要包含以下三个流程:
(1)模糊化
下面以侧向速度控制为例,来简述一下模糊化的步骤与原理,这种控制器一般使用2个输入量,分别是侧向速度偏差evy及其变化率 ,依惯例将其命名为e和ec。仅通过纯PID实施控制仿真,可以得到侧向速度偏差evy和偏差变化率 随时间波动的图形。在本仿真例中,由波形图即可大致确定侧向速度偏差eVy的基本论域取为[-1,1]rad/s,同理可确定出论域区间。将输入量各自的论域区间划分为递增的几个离散的量化等级,这一过程称为论域变换。之后经由隶属度函数将输入量变换为语言变量。
(2)知识库与模糊推理
通过分析kp、ki、kd对系统的影响情况可知:当E为正大并且EC为负值时,应增大△kp的值,减小△ki的值;当E为正大且EC为正值时,应当减小△kp的值,增大△ki的值。结合文献[11]中制定的控制规则,本文制定的规则表如表1所示。
上述规则表所对应的surface图形如下图所示:
(3)反模糊化
反模糊化的过程作用是求出可直接作用于执行机构的数值,其操作原理与模糊化过程相对立,不再赘述。
3 仿真结果与分析
本节将通过matlab/simulink搭建的数学模型进行仿真实验,以便观察前文所提出的线性约束方法和模糊PID控制是否稳定有效。
假设车辆的前进速度为50km/h,在仿真的初始时刻给前轮施加幅值为0.2 rad的阶跃转角信号,输入信号如下图所示(假设轮胎与地面的附着系数为0.7)。
在阶跃信号作用下,首先观察一下前文提出的“线性约束下的驱动力分配方法”所运行出结果,如下图7所示,车辆在前进过程中,因为此刻前轮的转角不为0,那么在驱动力分配方法的作用下,两个前轮的纵向速度应当比两个后轮的纵向速度要大;又因为前轮的转向向左,那么左侧轮心的速度应当比右侧的轮心速度要小,图示的情况与这两点相符,而且动力分配模块在第2.1秒左右分配的动力值就趋于稳定,这就验证了分配算法的稳定性。
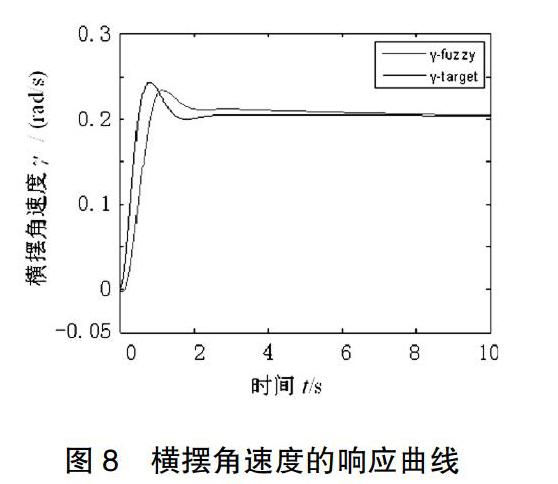
然后进一步观察模糊PID控制器的控制效果,与之相应的,在所设定的模拟工况条件下,侧向速度和横摆角速度的实际曲线均能较快的跟踪到目标曲线,
保证了车辆的平稳运行,跟踪响应如图7、图8所示,这就验证了所设计的控制器的有效性。
参考文献
[1] 汪杰.四轮毂电机驱动车辆转向稳定性控制[D].北京理工大学, 2015.
[2] 孙勇.分布式驱动电动汽车横摆稳定性控制研究[D].吉林大学, 2013.
[3] 刘少波,陈庆樟.基于PID控制的电动汽车电机制动ABS研究[J]. 现代制造工程, 2017(10).
[4] 林程,彭春雷,曹万科.独立驱动电动汽车稳定性的滑模变结构控制[J].汽车工程,2015(2):132-138.
[5] 靳彪.轮毂电机驱动电动汽车状态参数观测及转矩分配策略研究[D].2016.
[6] 李文.基于目标优化的四轮驱动电动汽车转矩分配策略研究[D]. 2013.
[7] 盛勇鑫.轿车侧向稳定性控制算法研究[D].吉林大学,2008.
[8] 林棻,黄超.汽车质心侧偏角估计的研究现状及发展[J].中国机械工程,2013(01):139-145.
[9] 李刚,韩海兰等.四轮轮毂电机电动汽车横摆力矩模糊PI控制[J].機械设计与制造,2015,7(104).
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
科技视界(2016年21期)2016-10-17
商(2016年27期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
投资北京(2016年6期)2016-05-14
世界汽车(2015年3期)2015-09-10
计算机应用文摘·触控(2014年4期)2014-02-22
