
电动小汽车纵向主动避撞系统的建模与仿真
2020-11-12 02:14左思张甫城张新锋
汽车实用技术 2020年19期
左思 张甫城 张新锋
摘 要:随着我国汽车行业的快速发展,小轿车已经成为了普通家庭的标配,私家车的普及为我们的出行带来了极大的方便。在享受汽车带来的生活便利的同时,交通事故带来的人民生命、财产损失却不容忽视,因此,汽车主动安全性受到越来越广泛的关注。文章利用Carsim软件进行整车建模,利用Matlab/Simulink软件搭建电动小汽车的主动避撞控制策略以及仿真模型包括加速/制动切换模型、电机逆模型、制动系逆模型。最后将各个模块连接在一起,形成了Matlab/Simulink与Carsim的闭环联合仿真系统。
关键词:电动小汽车;纵向主动避撞;Carsim;联合仿真
中图分类号:U467 文献标识码:A 文章编号:1671-7988(2020)19-183-04
Modeling and simulation of the longitudinal active collision avoidance
system of an electric car
Zuo Si, Zhang Fucheng, Zhang Xinfeng
( Changan University Automotive College, Shaanxi Xi'an 710006 )
Abstract: With the rapid development of Chinas automobile industry, car has become the standard for ordinary families, and the popularization of private cars has brought great convenience for our travel. While enjoying the conveniences brought by the automobile, the peoples life and property loss caused brought by the automobile cant be ignored. Therefore, the active safety of the automobile is paid more and more attention. In this paper. Carsim software was used for vehicle modeling, and Matlab/Simulink software was used to build the active collision avoidance control strategy of the electric car as well as the simulation model, including the acceleration/braking switching model, the motor inverse model and the braking system inverse model. Finally, the modules are connected together to form the closed loop joint simulation system of Matlab/ Simulink and Carsim.
Keywords: Electric car; Longitudinal active collision avoidance; Carsim; Joint simulation
CLC NO.: U467 Document Code: A Article ID: 1671-7988(2020)19-183-04
引言
隨着科学技术的不断发展,现代汽车主动避撞系统功能愈加强大,现代汽车主动避撞系统已经能够做到自适应巡航ACC,车辆主动报警CWS,路径规划,路径跟踪(MPC),复合型车辆智能控制系统等。随着V2X技术的不断发展,V2X技术将在汽车主动避撞系统中起着举足轻重的作用,V2X技术可以实现车与车之间的通信,例如V2X可以获取他车的经度、他车行驶航向角度、他车纬度,他车的方向盘转角状态,他车车速大小,他车油门大小状态、他车制动踏板状态及车高、车长、车宽等信息。这样获得的信息便不受传感器的灵敏度、天气等因素影响,更加准确、可靠。
本文设计的电动小汽车主动避撞系统利用车载雷达采集到的信息,比如前后车的相对速度,相对距离等信息传给电动小汽车主动避撞系统的ECU,ECU根据传感器采集到的信息按照预先设置的控制策略主动减速或者加速,使自车能够与前车保持安全距离并以合适的车速跟车行驶,实现电动小汽车纵向的主动避撞。
1 电动小汽车纵向主动避撞系统得建模
1.1 Carsim整车模型的建立
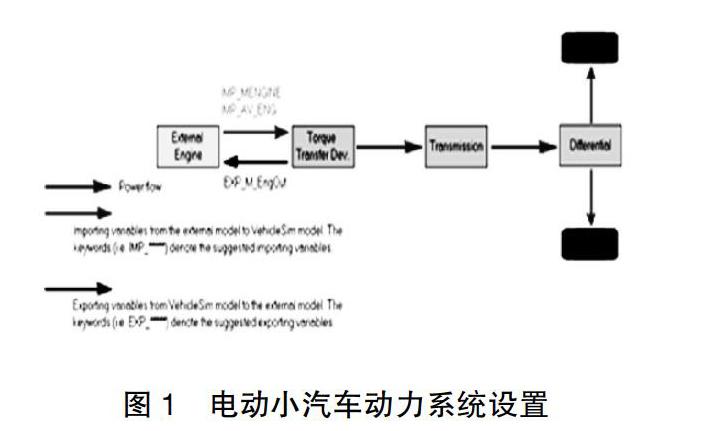
因CarSim中只有针对常规燃油汽车的整车模型,即其动力是由发动机经传动系统传至车轮,而本文的电动小汽车动力是通过电机直接驱动产生的。所以,针对电动小汽车在CarSim环境下的整车建模跟传统汽车不同,需要借助外部的接口接入给其提供驱动力[4],如图2所示。
本文建立的整车模型参数如下表所示:
Carsim与 Simulink的联合仿真输入变量为IMP_MYUS -M_L1,IMP_MYUSM_L2,IMP_MYUSM_R1, IMP_MYUS -M_R2,IMP_PCON_BK;输出变量为:SpdS1_1,Vx,DisS1_1,Ax。
1.2 电动小汽车逆纵向动力学建模
本文采用分层式控制思想来设计电动小汽车纵向主动避撞系统。分层式控制即为上层控制和下层控制,上层控制器根据汽车的当前行驶状态,按照预先设定的控制策略输出电动汽车期望的加速度,下层控制器根据上层控制器输出的期望加速度计算得到期望的电机转矩和期望的制动压力,再将转矩和制动压力输入到整车模型中对汽车的纵向运动进行控制,避免前后两车发生碰撞。
电动小汽车主动避撞系统分层式控制思想如下图:
若汽车当前应进行加速,则需要根据期望的加速度ades,通过电机逆模型,求得期望的电机输出转矩[1]。设:
(1)
根据文献[1]得到纯电动小汽车行驶方程式为:
(2)
则根据公式(2),期望的电机输出转矩可简化为:
(3)
根据汽车的行驶阻力平衡方程,可得到汽车制动时动力学平衡方程:
(4)
因Fxb与p成正比关系,即:
(5)
由公式(4)、(5)可得到期望制动压力为:
(6)
2 模糊控制
驾驶员在驾驶过程中,通过前后车的相对距离和相对速度来判断汽车当前是否处于危险工况,如果处于危险工况则踩刹车制动,否则踩油门进行加速。驾驶经验丰富的老司机能够通过肉眼大致判断自车速度与目标车速得到一个安全距离,然后将前后车的相对距离与安全距离进行比较,若相对距离小于安全距离,则制动刹车,避免前后车发生碰撞引发交通事故。若相对距离大于安全距离则加速行驶。因此,本文将前后车的相对距离与安全距离之差作为模糊控制器的第一个输入量。
(7)
因为前后车的相对速度(自车速度与前车速度之差)也是判断汽车是否处于安全行驶状态的一个重要指标。所以,本文将前后车的相对速度作为模糊控制器的第二个输入量,即:
(8)
本文在搭建电动小汽车纵向主动避撞系统的控制器时采用Sugeno型模糊算法,输出变量为期望加速度ades 其规则形式如下:
(9)
式中:x和y为模糊控制器输入变量,A和B为输入变量的模糊集合,z为输出变量,k为常数。
本文的模糊推理规则共25条,模糊控制规则见表2。
3 仿真结果分析
3.1 前车静止工况
前车速度为零,自车与前车的初始距离为30m。仿真得到自车与前车的速度变化如图3所示,前后车相对距离变化如图4所示。
由图3可知,在开始时刻,自车速度逐渐增加,在6s之后车速逐渐减小,最后在22s左右速度降为零,而前车速度一直为零。由图4可知,在开始时刻,前后车的相对距离为30m,随着时间的增加,前后车的相对距离逐渐减小,在22s左右保持不变。经过分析可以得出:在该工况下,前后两车并没有发生碰撞,达到了主动避撞的要求。
3.2 前车匀速工况
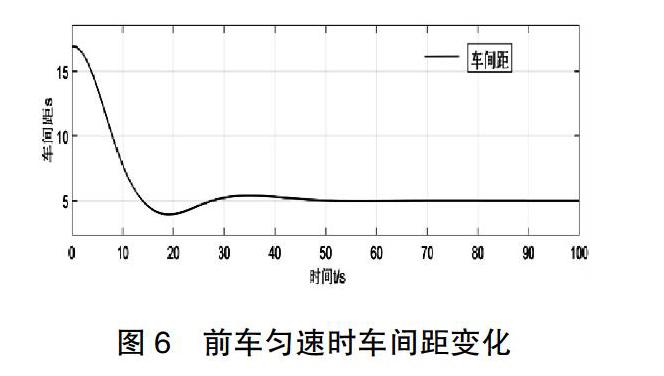
前车以30km/h匀速运动,自车的初速度也为30km/h,自车与前车的初始距离为20m。仿真得到自车与前车的速度变化如图5所示,前后车相对距离变化如图6所示。
由图5可知,在开始时刻,自车速度逐渐增加,在7s之后车速逐渐减小,最后在50s左右速度降为30Km/h,自车与前车保持相同的速度行驶。由图6可知,在开始时刻,前后车的相对距离为20m,随着时间的增加,前后车的相对距离逐渐减小,在50s左右保持不变。经过分析可以得出:在该工况下,前后两车并没有發生碰撞,达到了主动避撞的要求。
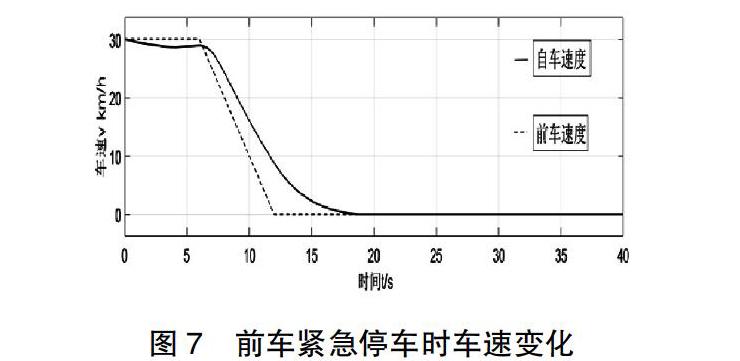
3.3 前车紧急停车工况
前车以30km/h匀速运动,前车在12s时速度变为零,自车的初始速度也为30km/h,自车与前车的初始距离为20m。仿真得到自车与前车的速度变化如图7所示,前后车相对距离变化如图8所示。
由图7可知,在开始时刻,自车和前车均以30km/h的速度行驶,6s之后前车速度开始从30km/h减速,在12s时停止;自车速度也逐渐减小,在18s时速度降为零。由图8可知,在开始时刻,前后车的相对距离为20m,由于开始几秒钟,两车速度相等,相对距离并未发生变化,随着时间的增加,前后车的相对距离逐渐减小,在17s左右保持不变。经过分析可以得出:在该工况下,前后两车并没有发生碰撞,达到了主动避撞的要求。
3.4 复杂工况仿真分析
初始时刻前车以40km/h的速度运动,自车的初速度也为40km/h,自车与前车的初始距离为20m。前车做无规律的运动(突然减速,匀速加速,减速),仿真得到自车与前车的速度变化如图9所示,前后车相对距离变化如图10所示。
由图5.7可知,自车速度随着前车速度的变化而变化。当前车减速时,自车速度也减小;当前车加速时,自车速度也逐渐增加。由图5.8可知,前后车的相对距离不断变化,但自车与前车都在安全距离之外不会发生碰撞。经过分析可以得出:在复杂工况下,前后两车并没有发生碰撞,达到了主动避撞的要求。
参考文献
[1] 闫丹彤.电动汽车主动避撞控制系统建模与仿真研究[D].湖南大学,2015.
[2] 郑磊.汽车纵向主动避撞系统的仿真研究[A].四川省汽车工程学会、成都市汽车工程学会.四川省第十一届汽车学术年会论文集[C].四川省汽车工程学会、成都市汽车工程学会:2013:7.
[3] 侯德藻,刘刚,高锋,李克强,连小珉.新型汽车主动避撞安全距离模型[J].汽车工程,2005(02):186-190+199.
[4] 刘秋生.轮毂电机电动汽车实车平台及其驱动控制策略研究[D].西华大学,2016.
