整地播种一体机的设计与应用
2020-11-13 06:01王黎阳杨发展李维华姜芙林荐世春
山东农业科学 2020年10期
王黎阳,杨发展,李维华,姜芙林,荐世春
(1.青岛理工大学机械与汽车工程学院,山东青岛 265200;2.山东省农业机械科学研究院,山东济南 250100)
近年我国农业生产机械化水平逐步提高,已基本满足传统的农艺要求,然而与国外规模化生产相比,还存在着技术起步较晚,整体水平较低,且大部分为单一化作业[1-3]。以鲁东部分地区为例,地势平坦,作业面积广阔,耕整地与播种工作基本摆脱了人工作业,且能够参与农业生产的机型种类较多,但存在着机具的作业功能比较单一,在整地作业后,动力机具还需要离开耕作区更换播种机再进行播种作业和后续的镇压等工序,不仅费时费力,也容易耽误农时[4-5]。
集成化作业农机具可以实现一次进地作业同时完成耕地、整地、灭茬、起垄等多项作业,是一项保护性作业方式。但由于起步较晚,许多机型开发后还未能进行充分的田间试验,极易导致机具难以满足农艺要求,对农业生产造成不利影响。基于上述分析,为加速推动农机集成化与联合化作业,越来越多的专家学者投身其中,如喻启忠等[6]研发了一种22BZL-8型联合整地播种机,可以实现多种作业同时进行,并通过更换部件实现不同穴播模式的转换;王超柱等[7]研发了一种旋耕施肥播种机,并通过试验获得了不同播种模式下的作业效果。
本研究通过对不同耕整地作业模式及市场现有机型的深入对比筛选[8,9],总结现有联合化作业机具的不足,选取碎土整平效果较优的立式旋耕机与小麦条播机进行集成,研制出一种施肥、整地、播种一体化作业机,提出将肥箱搭载于立式旋耕机上,采用沟播施肥方式,通过立式旋耕搅匀肥料,提高肥料利用率及小麦吸收效率,并采用液压悬挂架连接不同农机具,既能满足作业要求,还可有效调节农机高度,提高作业灵活性与农机间的匹配程度。通过施肥、整地、播种等多种工作集成作业,可以有效保护耕层结构,为小麦生长提供良好的种床环境,对提高作业质量、减少劳动成本、提高肥料利用率、实现小麦增产具有重要意义[10,11]。
1 整地播种一体机结构形式与工作原理
1.1 设计思路
通过对比现有几种主要耕作模式及对应农艺要求,提出以下设计思路:
(1)在传统整地机械中进行筛选比照,选择立式旋耕机与能够实现精量播种的条播机整合为可以集成作业的一体机,并通过优化改良关键工作部件,提高整机作业性能。
(2)为提高不同农机具间的匹配程度,使用液压悬挂架进行连接,可以在作业过程中调节农机工作高度(进而实现对播种深度的调整),且有利于作业前的机具运输。
1.2 整机基本结构
本研究对整地播种一体机设计的主要结构形式如图1所示,整机主要包括施肥装置、立式旋耕机(动力驱动耙)与小麦条播机。

图1 整机结构简图
整机采用三点悬挂方式与拖拉机连接,动力传动方式如图2所示,减速箱输入轴由拖拉机输出的万向节获得动力,通过变速箱调节转速,并通过锥齿轮传动改变传动的转速方向,带动动力耙箱体中的齿轮组传动,进而驱动动力耙的刀组进行立式旋耕作业。刀组两侧与后方设有刮土板,可有效防止作业过程中土壤飞溅,保证整平效果。动力耙与碎土辊之间除使用销轴连接外,使用液压缸连接用以调节碎土辊作业深度。
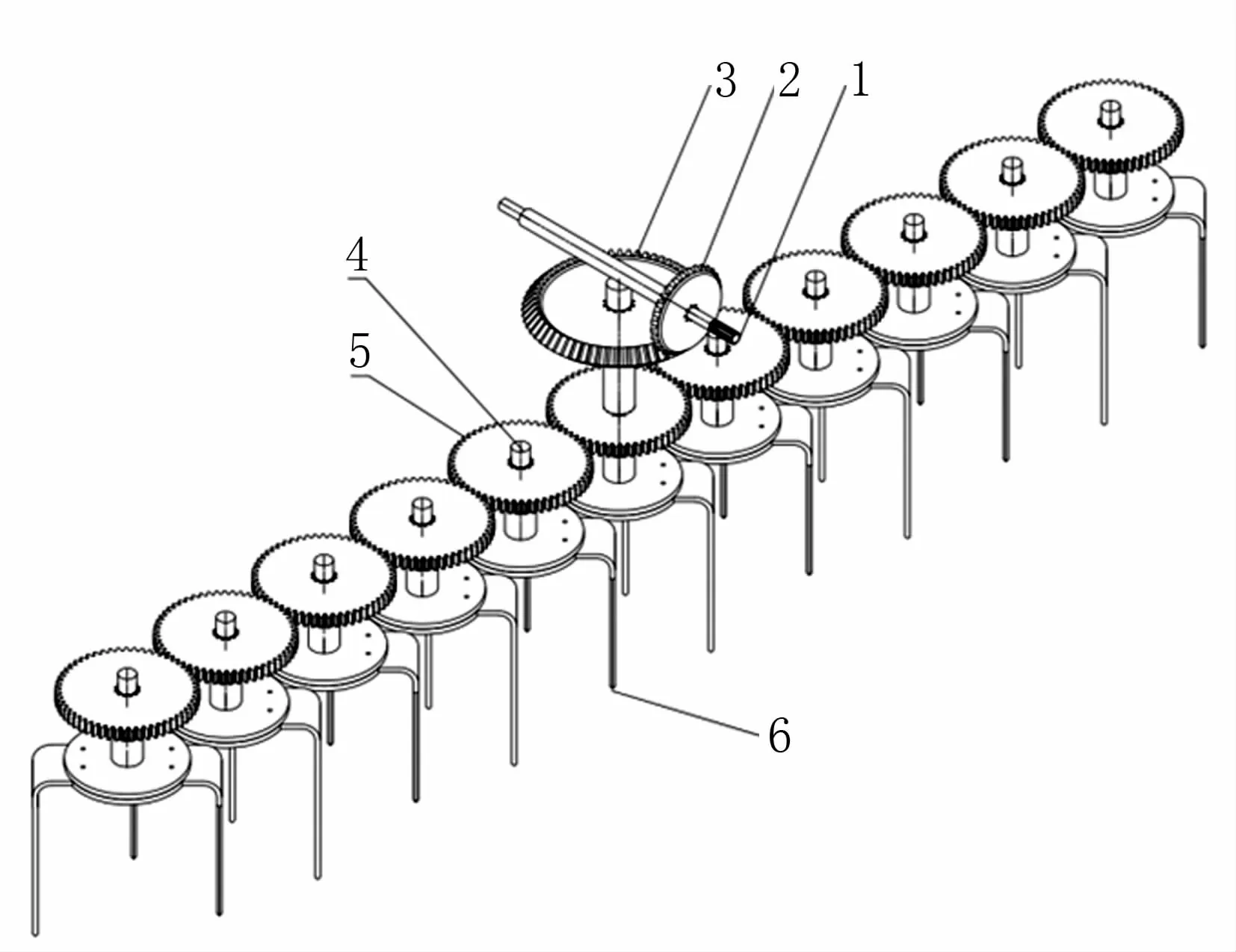
图2 传动方式示意图
动力驱动耙部分采用与施肥箱、施肥器组合设计。施肥箱安装于动力耙主箱体上方,施肥方式采用沟播施肥,施肥器安装于动力耙前侧横梁上。整机中的施肥器拟采用分层施肥原理,通过一次分三层施肥,满足小麦生长过程中的肥料需求。
一体机播种部分采用小麦条播机进行播种作业,主要由悬挂架、种箱、排种轮、种子调整器等结构组成,播种机与动力耙之间采用液压悬挂架连接,不仅连接紧密,还可通过液压调节播种机高度,在运送过程中提升播种机使整机总体长度缩小,减少转弯半径,增大整机运送的灵活性。
1.3 工作原理
一体机工作原理如图3所示。机具在作业过程中首先进行施肥作业,将肥料撒入土壤中,立式旋耕在进行碎土整平作业的同时,将肥料搅匀入土;待旋耕之后迅速进行整平镇压,增加土壤的紧实度,为小麦种子生长提供良好的种床环境,最后进行播种作业。通过整机一次入田,可同时完成施肥、整地、镇压、播种等多项作业。行进过程中,肥箱与种箱通过自配小电机获得动力进行排肥与播种作业,旋耕部分由拖拉机获得工作动力。
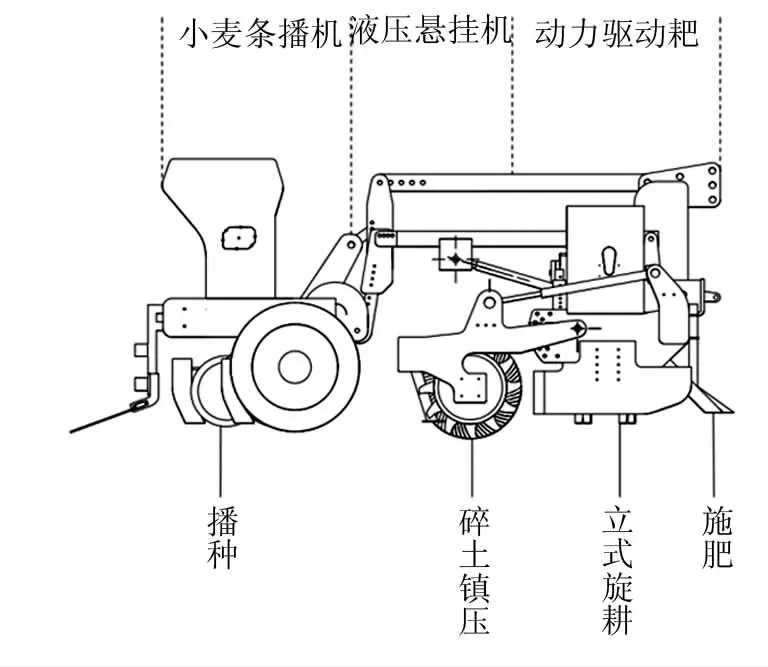
图3 一体机作业原理图
2 一体机关键部件设计
如今农业机械联合化发展的主要障碍为不同农机匹配程度较低、衔接性不足,因此本研究设计的整地播种一体机以减少耕层土壤破坏、提供优良种床环境为目标,对整地播种一体机的关键作业部位立式旋耕部分的几项关键部件进行优化设计。
2.1 旋耕刀组运动参数计算
立式旋耕机工作时,旋耕刀依靠齿轮的啮合传动,因此选择一组相邻的旋耕刀进行分析,其整体运动为绕刀轴中心的圆周运动与机具前进带来的直线运动的合成[12,13]。刀组运动分析示意图如图4所示。
在转向相反的相邻旋耕vt刀上各取一点a1、a2,得出两点的位移分别为:



图4 旋耕刀运动分析图
式中:R为旋耕刀刀尖与中心轴间的最大距离;va为整机前进速度;τ旋耕刀初始安装夹角;ω为旋耕刀圆周运动角速度;t为运动时间;L为相邻旋耕刀盘中心距。
由方程(1)与方程(2)可知,立式旋耕机的旋耕刀运动轨迹为摆线,根据位移公式可以进一步推导出旋耕刀轨迹路线上任一点的曲率半径ρ为:

其中,λ为余摆线运动中的刀具速比,其表达式为:

由公式(4)可见,在整机作业过程中,刀具工作角速度保持不变,速比λ随整机前进速度的增大而减小,由公式(3)可知λ减小会导致轨迹路线曲率圆减小,曲率半径逐渐增大。由速比λ不同可分为两种情况:

以一组相邻旋耕刀为观察对象,用 Solid-Works进行三维实体建模,并通过Motion插件对旋耕刀进行运动仿真,赋予两旋耕刀数值为260 rad/min、转向相反的转速,以及前进速度 v,通过跟踪刀尖行动轨迹来观察旋耕刀作业效果,不同前进速度的轨迹路线如图5所示。可见前进速度v加快会导致耕作区域逐渐稀疏,只有轨迹为余摆线路线时,才能达到良好的碎土作业效果。
图5所示的作业轨迹也适用于卧式旋耕,卧式旋耕刀尖轨迹为竖直面内的摆线形状,随着速度加快卧式旋耕刀向后抛土能力逐渐降低至消失,并严重影响耕作深度,而立式旋耕的作业速度只会影响碎土效果,与耕深及沟底平整度无关,因此,立式旋耕可以使用较大工作速度,但为了保证碎土整平效果,立式旋耕机的速比取λ>1,工作参数正常为:v=0.5~1.5 m/s;ω=190~260 rad/min;h=20~28 cm。

图5 旋耕刀不同前进速度轨迹图
2.2 碎土辊设计
碎土辊设置在动力驱动耙后,在旋耕作业后进行工作,可以将旋耕未能打碎的坚硬土块进行二次破碎,并将经过旋耕整平后呈疏松状态的耕层土壤进行压实,碎土辊上布满辊齿,有助于破碎大块土壤,辊齿前端呈弧线型,可以有效减少入土阻力,提高碎土辊作业稳定性。碎土辊结构形式如图6。
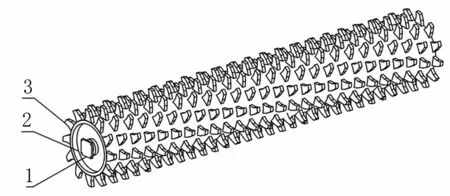
图6 碎土辊结构示意图
碎土辊作业原理与圆盘耙相似,因此按照圆盘耙结构参数公式进行理论计算,碎土辊直径D主要与作业深度有关,表达式为:

式中:K为径深比系数,根据耙种类不同,取值区间不同,总取值区间为3~7;amax为最大工作深度。
研究表明,小麦、玉米的播深为30~50 mm时产量表现较为突出,取经验参数K最大值7,由式(6)可得碎土辊主体直径为350 mm。通过圆盘耙耙片厚度计算公式确定碎土辊辊齿厚度:

根据公式(7)得出辊齿厚度取值范围为:2.8 mm<δ<7.0 mm,综合考虑板材标准厚度、工作可靠性与加工简易性问题,取辊齿厚度为10 mm。
2.1.2 节介绍了哈希函数可以用于检验消息是否被篡改,但是消息的接收方却无法确认消息的发送方是谁。数字签名能很好地克服该缺点,用户首先产生2把不同密钥,其中一把为私钥,需要秘密保管;另一把为公钥,需要公开发布,且他人很难从用户的公钥推算出相应的私钥。一个数字签名方案[16-17]包含3个多项式时间算法:
辊齿间距计算公式为:

式中:a为工作深度。
满足公式(8)即可保证碎土作业不会产生泥土堵塞现象,取间距为90 mm的辊齿12个为一组,呈螺旋型排布于碎土辊上,保证只有少量辊齿同时作业,防止同一时间受力过大造成震颤;按照螺旋排布可有效防止多边形效应,其排布方式展开图见图7。

图7 碎土辊辊齿排列展开示意图
为保证碎土辊能够适应不同土壤环境,不会产生泥土黏附堵塞现象,在相邻碎土辊的辊齿间安装刮土板,以便及时清除碎土辊作业时辊壁黏附的泥土杂草,能够有效保证作业质量。
2.3 液压悬挂架
2.3.1 受力分析 图8为液压悬挂架结构示意图,总体包括主支撑架、支撑梁、液压缸、悬挂机架等部分。
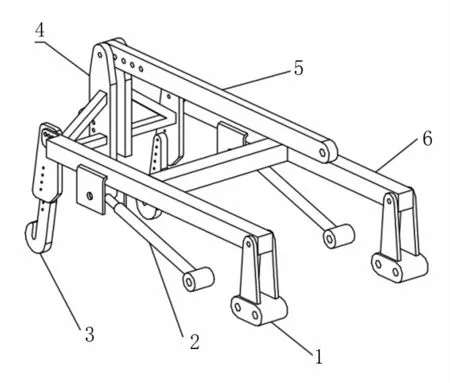
图8 液压悬挂架结构示意图
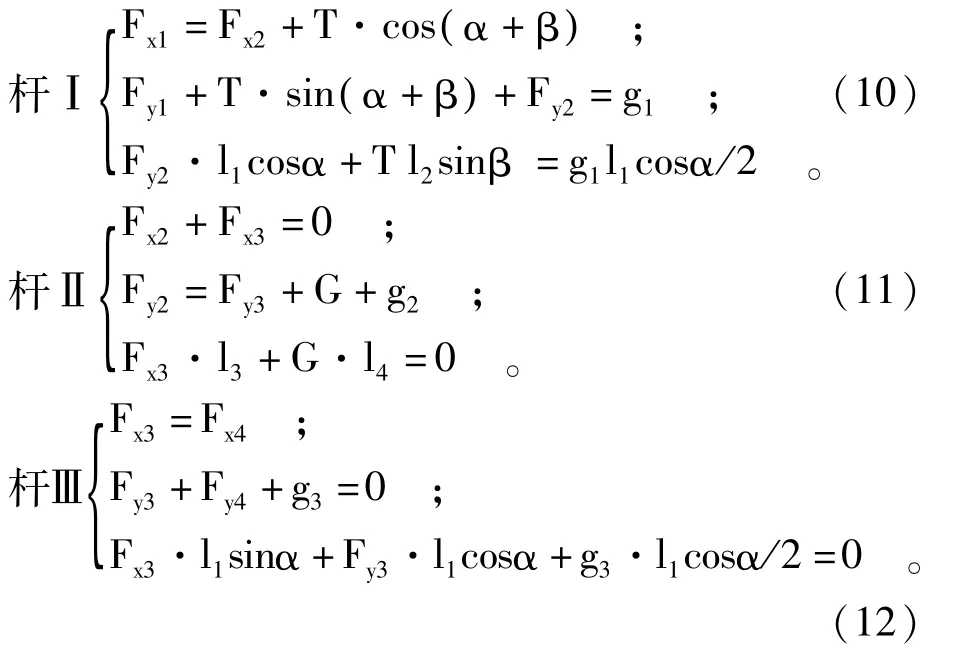
主支撑架主要用于承受液压缸的支撑,与支撑梁一同对悬挂机架进行三点支撑,悬挂机架与播种机连接,连接方式采用销轴与挂钩连接,灵活度高、承载能力强。液压悬挂架整体受到自身重力、条播机重力与液压缸支持力作用,可看作两点固定的四杆机构,整体与局部受力如图9所示[14-16]。

图9 液压悬挂架受力分析图
对其进行受力分析,可得受力平衡表达式:


2.3.2 仿真模型建立 通过UG进行三维实体建模并进行动力学运动仿真,动力耙连接机架作为固定部分设置固定副,液压悬挂架各活动部分间采用旋转副连接,悬挂机架与条播机相对静止因此设为整体连杆,将液压缸两部分设为相对滑动的滑块副,以液压缸自身为矢量方向,设置v=10 mm/s的匀速运动方式作为驱动力。液压悬挂架与播种机金属结构选择钢材为45#,播种机处额外增加100 kg质量以模拟种箱装满时的工作状态,求解时长30 s,步长500。
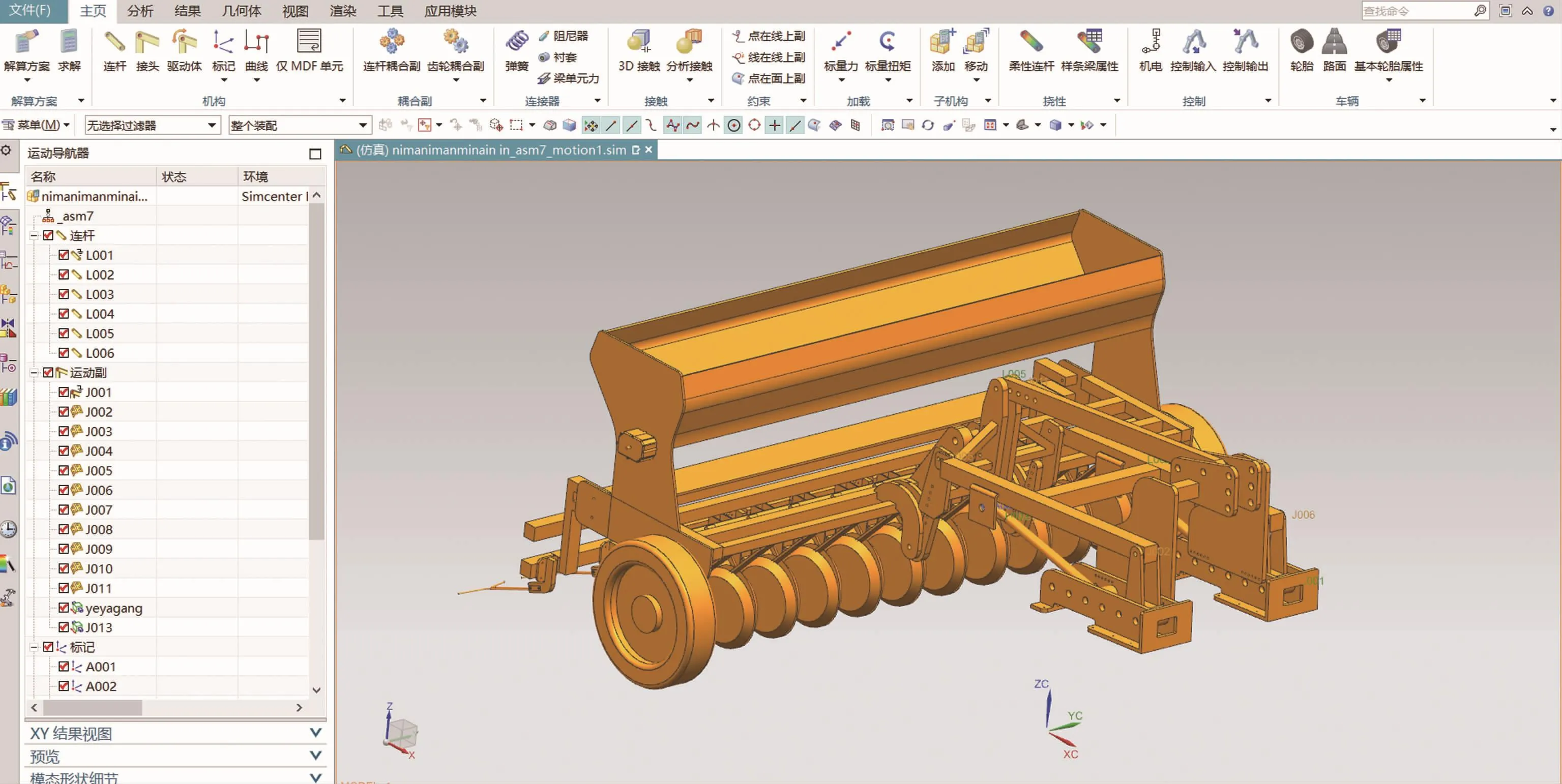
图10 液压悬挂架仿真模型建立
2.3.3 结果讨论 通过仿真计算导出液压缸滑动副处力矩图与扭矩图,如图11、图12所示。
液压缸在匀速推进过程中,所受扭矩微弱,液压悬挂架将条播机逐渐抬起并使其做圆周运动,直到提高至最大高度。由图11可以看出,在0~7 s内液压缸力矩缓慢提高,主要因为在此期间条播机提升较为缓慢,在竖直方向位移变化较小。在7~19 s内力幅迅速增大到35 000 N并保持相对稳定,在此期间条播机竖直位移变化幅度较大,需克服重力与惯性力,因此所需力幅极大。在19~27 s内液压缸力幅减少到26 000 N左右,在27~30 s内力幅迅速减小至5 000 N以下,因为条播机高度升到最大,不需要额外增加推力克服重力提升条播机。
由仿真可得作业过程中液压缸作用力幅值大小,可通过此方法选出能够满足工作的液压缸,提高悬挂架可靠性,达到灵活调整条播机高度的效果。

图11 液压悬挂架运动力矩

图12 液压悬挂架运动扭矩
3 一体机主要技术参数
该整地播种一体机的主要技术参数见表1。

表1 一体机主要技术参数
4 田间试验
4.1 试验地点
于2019年在平度市田庄镇开展田间试验,遵循试验地选择标准,选取面积为333.3 m2的地块进行田间检测(图13),所选田块地势平坦、无障碍物,土壤为砂姜黑土,试验面积满足机具作业要求,玉米收获后秸秆打碎回收,未抛撒入田。
4.2 作业性能测定方法
一体机入田作业使用约翰迪尔6J-2104轮式拖拉机进行悬挂牵引,动力为210马力。课题组遵循JB/T 8401.1—2017《旋耕联合作业机械》中旋耕联合作业机评定标准对一体机进行测试,根据评定要求,耕深、耕深稳定性、植被覆盖率、碎土率根据GB/T 5668旋耕机评定标准进行检验评定,各行排种量一致性变异系数、总排种量稳定性变异系数、种子破损率、播种均匀性变异系数、播深合格率根据GB/T 9478谷物条播机评定标准进行检测评定。耕深与播深测量方法见图14。
4.2.1 耕深及稳定性 根据旋耕机相关作业性能测定要求,测定时,沿机组前进方向,每相隔2 m在左、右两侧各取一点,共取20点进行测定,根据GB/T 5668旋耕机评定标准计算耕深平均值与耕深稳定性。
4.2.2 碎土率与植被覆盖率 在已耕地的每个行程中测定一点,选取0.5 m×0.5 m面积内的耕层土壤进行测定,土块大小按照最长边长度进行划分,分别为<4 cm、4~8 cm和>8 cm三个等级,以<4cm的土块质量在总质量中所占比重作为碎土率,并在测定碎土率所选测点上通过耕前、耕后植被平均值进行覆盖率计算。
4.2.3 排种(肥)量一致性变异系数及稳定性在一体机未工作状态下对条播机部分进行测定,JP2以工作行进理论速度折算电机转速驱动排肥轴,以行进50 m为基准,测定行数为9行,重复5次,按照公式计算各行排量与总排量一致性变异系数,并同时计算总排量稳定性。按照JB/T 8401.1—2017《旋耕联合作业机械》评定标准,排肥量一致性变异系数与稳定性测试方式与排种量测定方式相同。
4.2.4 种子破损率 从多个排种器排出的种子中以100 g为标准取5份样本,选出破损种子进行称量并计算在总质量中的占比,减去试验前测定的种子原始破损率,进行5次重复测定取平均值。
4.2.5 播种均匀性 播种机进行下地试验,在一个往返单程内选取5个测定区域,测定行数为9行,条播机左、中、右各3行,测定区域不覆盖土层,以100 mm为一个区段,每行分别选取30个区段进行测定,计算标准差、平均数等以计算均匀性。
4.2.6 播深合格率 在一体机进行一次往返作业后,在往返路径上各选取5个区域进行测定,每个区域测定随机5个点,挖开土壤用米尺量取覆土深度h,并计算测定区域内覆土深度为(h+1)cm的点占总测定点数的百分比,作为播深合格率。
4.2.7 功率消耗 采用电测法,对拖拉机动力输出轴进行全程测定,分别测定扭矩、转速和平均功率,进而计算出行程与工况平均值。
4.3 一体机作业评定结果
经测定,该一体机测试结果(表2)满足国家标准的要求。

表2 一体机作业评定结果
5 结论
(1)一机多能,集成作业。弥补了单一模式作业中存在的农机衔接性差、延误农时等缺点,整机一次入田作业可同时完成施肥、整地、播种等多项工作,能够避免机具多次入田导致的土壤压实板结问题,可以有效保护耕层结构,提供优质种床环境,有利于种子萌发。
(2)整机工作所需动力要求不高,作业流程简单,操作方便,效率高,成本低,劳动强度小。采用沟播施肥方式,避免土表肥料被雨水冲蚀;肥料入田后通过动力耙搅动,均匀分散,避免肥料堆积造成土壤酸化板结。
(3)采用液压悬挂架进行不同农机间的连接,在保证连接强度的前提下可以有效调节作业高度,在运输过程中减少整体长度。整机不同部件连接均采用螺栓连接或销轴连接等可拆卸式连接方式,既可以一体化作业,也可以分开作业。
(4)该整地作业一体机作业质量满足国家标准的要求,具有良好的作业效果,且与卧旋播种机相比不会出现墒沟及缠草现象,能够适应高速、耕深更深的作业环境。
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
科技创新与应用(2022年14期)2022-06-02
湖北农机化(2021年2期)2021-12-01
新农民(2021年13期)2021-09-16
农民致富之友(2020年17期)2020-06-19
大麦与谷类科学(2020年2期)2020-06-01
农民致富之友(2019年12期)2019-05-22
农民致富之友(2017年21期)2017-11-18
农民致富之友(2017年11期)2017-06-20
科学中国人(2016年27期)2016-10-25