无人机机载激光清障一体化设计
2020-11-18 05:45余鹏田杰
环境技术 2020年5期
余鹏,田杰
(深圳供电局有限公司电力科学研究院,深圳 518000)
引言
输电线路异物飘挂是导致输电线路跳闸的重要因素之一。近年,我国综合国力不断增强、在高科技领域不断实现突破创新,输电线路清障技术发展迅速,其中较为经典的清障技术即为地面激光远程清障技术和无人机喷火技术。2016年,国网江苏电科院首次对激光在60 m外,对35 kV线路飘挂物成功清除进行了报道。该篇报道验证了将激光技术应用到输电线路清障领域的可行性[1]。2017年,国网江苏电科院陈杰等对这种激光清障方法进行了理论分析、有限元仿真和实验验证,结果表明,清除异物所需要最小功率密度为20 W/cm2,该功率密度的激光不会对输电线路造成损伤。目前北京北创芯通科技有限公司、中电集团27所、11所均有激光远程清除异物的相关报道[2]。但目前所研制的设备重量均在20 kg以上,且由于地面与清除物距离较远使得跟瞄过程十分复杂,有些激光光源还需外置制冷设备,难以实现在山、林等复杂环境中进行清除作业。2017年,广东电网公司江门供电局公开报道了一种基于多旋翼无人机输电线路清障装置,原理为无人机上搭载喷火器,在空中对线路上的异物喷射火焰,直至异物烧毁。同年,北京国网富达科技发展有限公司所研制的无人机喷火清障装置形成了产品批量销售[3]。2018年,国网莆田供电公司、南网梧州供电局、玉林供电局相继报道了无人机喷火技术在110 kV输电线路清除异物的应用,整个操作过程为15 min,仅需2~4名操作人员[4]。该项清除技术虽然方便快捷,但极易引发火灾,存在一定的安全隐患。
综上,目前亟需一种方便、安全、快捷的技术解决输电线路的异物挂线问题。南方电网深圳供电局2017年在国内外首次报道了基于无人机平台的激光清障装置研制成功,该装置的激光输出功率为80 W,工作距离为6~7 m,总重量为3.5 kg,搭载平台为多轴云台或光学吊舱,清障时间仅为十几秒,可对农膜、鱼线、风筝线、尼龙等多种材料进行清除。目前,研究一种输出功率更高、工作距离更远、整体重量更轻量的清障装置,是下一步研究工作的重点。
1 基于无人机平台的激光清障系统
本文基于无人机平台的激光清障系统包括以下几部分:多旋翼无人机、特种激光器、定制云台及地面监测与控制单元,其中特种激光器和云台构成了整个系统的载荷系统。
1.1 多旋翼无人机
无人驾驶飞机简称“UAV”,是一种利用无线电遥控设备和自备程序控制装置操纵的不载人飞机[5]。近年来,无人机因为体积小、机动灵活、成本低等优点,被广泛应用在各行业各领域中。多旋翼分为四旋翼、六旋翼、八旋翼等,经过前期调研分析,六旋翼无人机能够满足载荷重量的要求,故此采用六旋翼作为激光清障系统的无人机平台。六旋翼无人机结构示意图如图1所示。
1.2 特种激光设备
针对技术要求,拟对高亮度光纤激光形成技术机理展开研究,研究不同激光输出形式下,材料破坏的物理过程,掌握连续/脉冲激光参数与材料破坏之间的关系,以及激光与电网异物之间的作用机理,为清除实验提供理论指导,最后通过整机的轻量化设计,包括轻量化结构和散热组件,实现机载清障激光器小型化、长工作距离的目的。
根据前期对于激光器的调研,结合项目的特殊需求,共进行3次地面激光试验:
1)5 W、8 W小型激光器,重量500 g左右,尺寸:20*10*10 cm,采用半导体激光器,有效距离为2~3 m,持续工作时间1 min将异物清除;
2)100 W中型激光器,重量在3.7 kg左右,采用分体式设计,光纤激光器与供电部分分离,减轻云台承重的压力,尺寸为:14*12*8 cm,有效作业距离在8 m左右,1 s后温度达到450 ℃,持续工作时间5 s左右能将异物清除;
3)200 W大型激光器,重量13 kg左右,尺寸为60*50*40 cm,采用光纤激光器,有效距离在15~30 m,持续工作时间30 s将异物清除。
结合多旋翼无人机平台及项目的需求,最终决定采用100 W功率的中型激光器作为多旋翼无人机的载荷系统。
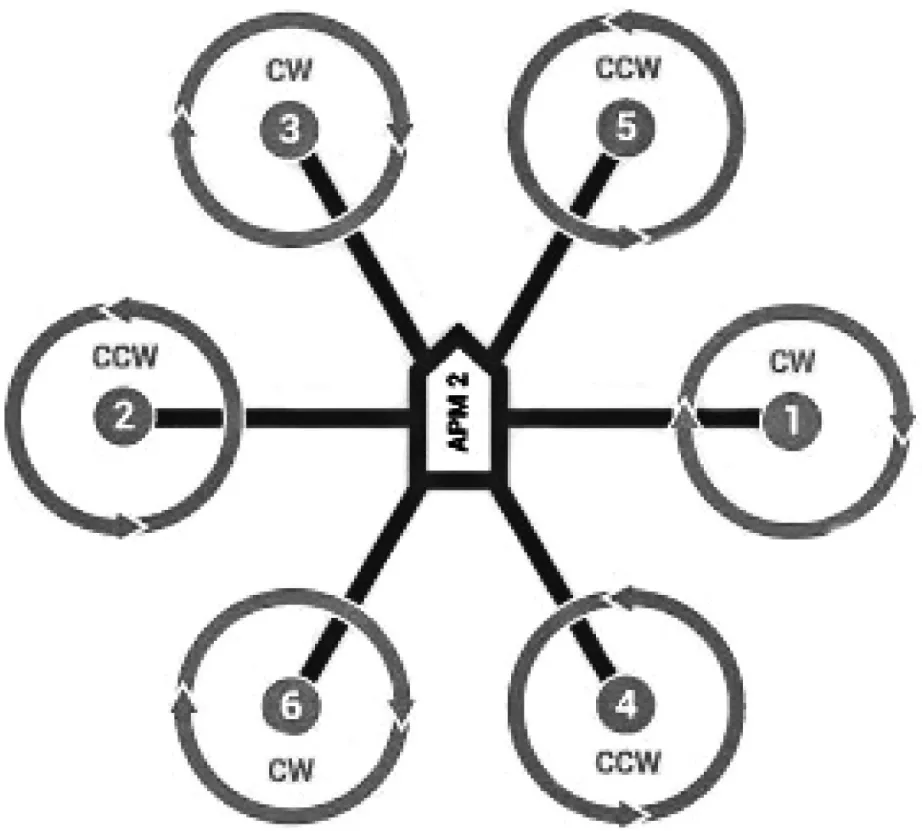
图1 六旋翼无人机结构示意图
1.3 激光光源设计
利用布拉格光纤光栅与增益光纤进行低损耗的熔接,将n个LD耦合输入振荡级的增益光纤,或通过透镜组将泵浦光直接耦合[6]。增益光纤与利用低损耗熔接的布拉格光纤光栅或双色镜共同组成光纤激光器的谐振腔,在光纤受到泵浦能量激发时,即可输出相应波长的激光。从耦合输出镜透射输出的高质量激光光束,在穿过光隔离器后,进入放大级的增益光纤。端面泵浦耦合技术典型示例如图2所示。
放大级仍然采用n个LD对向泵浦结构,以充分利用泵浦能量、降低光纤增益介质内的温度梯度与热致应力,保证输出激光的光束质量。在光路设计时,放大级中与前级输出激光通向相同的泵浦光可以适当减弱,以保护放大级的种子光入射端面。
通过主振荡功率放大(master oscillator power amplifier,MOPA)结构可以有效的分配n个LD泵浦的能量[7],有效降低各个光纤输入端面的热负荷,同时保证的光束质量,最终得到高效率、大功率的激光输出。端面泵浦耦合方案如图3所示。

图2 端面泵浦耦合技术典型示例
1.4 光学系统设计
激光输出光纤为多模光纤,芯径约为100 μm,数值孔径较高,大约0.22[8]。对于该光纤,输出光斑较小,发散角很大,不能直接应用于激光清障中,需要通过透镜准直然后聚焦才能作用到被清除物上,以起到障碍物清除的作用。而准直后的光斑大小,直接影响后续光学系统的口径从而影响光学系统的总重量。针对这一问题,光纤激光输出扩束准直系统将采用无焦扩束系统。玻璃基片采用高硬度、高化学稳定性、低密度的silica。根据光纤耦合输出要求,选取芯径为100 μm,NA值0.22的光纤,初步设计扩束准直系统,在激光准直系统测试设备上进行测试。测试结果如图4所示。

图3 端面泵浦耦合方案
2 激光定制云台
由于激光器搭载在多旋翼无人机上,受空中气流的不稳定以及无人机自身因素的影响,无人机不可能悬停在某一点上并保持绝对静止,而激光系统距离目标物约8 m左右,发射的激光束不可能一直聚焦在同一点上,导致清除异物的时间大幅延长,影响清除效果。
为了解决上述问题,专门定制了激光器云台,通过高频减震系统和高精度陀螺稳定平台隔离外部干扰,保持激光器指向在惯性空间内保持不变,采用视频跟踪实现对线上异物目标的锁定和自动跟踪,用于挂载与多旋翼无人机观测并清除输电线路上异常飘浮物。
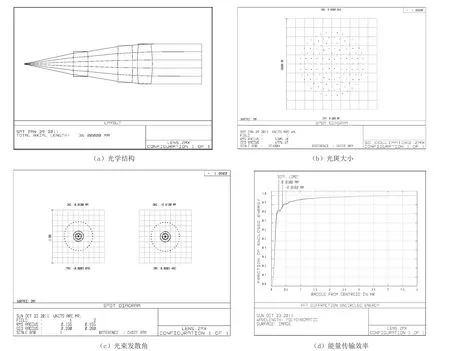
图4 扩束准直设计结果
设计三轴云台,采用方位-俯仰-横滚型结构,通过三轴解耦算法隔离各通道之间的相互影响,增加反馈环路通过控制系统多环路闭环控制,提升系统的稳定控制精度。在设计方案基础上,通过软件仿真确定系统控制参数,力矩核算选取电机、编码器、驱动器一体化电机,完成结构设计优化、硬件研制,样机组装调试完成后进行三轴摆动台架测试验证三轴稳定云台性能。三轴激光云台采用方位-俯仰-横滚型结构,激光器和摄像机等载荷安装在横滚框架上。安装在横滚框架上的陀螺敏感载机扰动,通过陀螺稳定回路和跟踪控制回路,使云台在飞机摇摆、振动条件下保持瞄准线的稳定,使其横滚框架内的图像传感器输出稳定的图像并实时跟踪锁定目标,同时激光器发射的激光束对目标进行切割。
三轴激光云台主要分为结构部分和控制部分,由机械结构组件(结构部分)、硬件单板及软件(控制部分)和载荷单元组成,载荷单元是系统控制和稳定的对象,系统组成框图如图5所示。三轴增稳云台结构组成框图如图6所示。
3 地面监控系统
地面监测与控制单元为无人机飞行与管理系统,对无人机的稳定性、数据传输的可靠性、精确度、实时性等都有重要影响,对其飞行性能起决定性的作用地面操控人员通过地面监测与控制单元对无人机飞行状态进行监控,并进行相应的调整和干预。在执行任务时,发现架空线路上有异物(如:风筝线、朔料薄膜等),通过地面监控系统发送指令,搭载激光清障系统的无人机对线上异物进行清除。地面人员通过地面监测及控制单元对架空线路线上异物的清除过程、清除结果等一目了然。基于无人机平台的激光清障控制系统结构如图7所示。
4 实验测试
工程测试主要分为功能测试和性能测试,三轴自稳云台的基本功能主要包括手控旋转、增稳固定指向、自动跟踪,测试主要在静电实验室完成。增稳云台的性能测试主要包括空间稳定精度测试。
将该三轴云台安装于三轴摇摆台上,分别按照2 °、2 Hz和5 °、1 Hz正弦激励用摇摆台模拟载体扰动,对设备进行实际性能测试,验证上述控制算法的实际应用效果。图8为上位机显示的摇摆台在2 °、2 Hz时扰动曲线和三轴增稳云台稳定效果测试曲线;图9为上位机显示的摇摆台在5 °、1 Hz时扰动曲线和三轴云台效果测试曲线。
由摇摆台实际测试曲线可以看出,当系统给定2 °、2 Hz正弦激励时,方位轴稳定精度为0.02 °、横滚轴稳定精度为0.04 °、俯仰轴稳定精度为0.01 °;当系统给定5 °、1 Hz正弦激励时,方位轴稳定精度为0.02 °、横滚轴稳定精度为0.02 °、俯仰轴稳定精度为0.01 °。该稳定精度与仿真结果基本一致,说明该陀螺稳定控制算法设计有效,超过了任务书中测角精度≤0.05°和稳定精度≤2 mrad(RMS)的技术要求。

图5 三轴激光云台组成框图
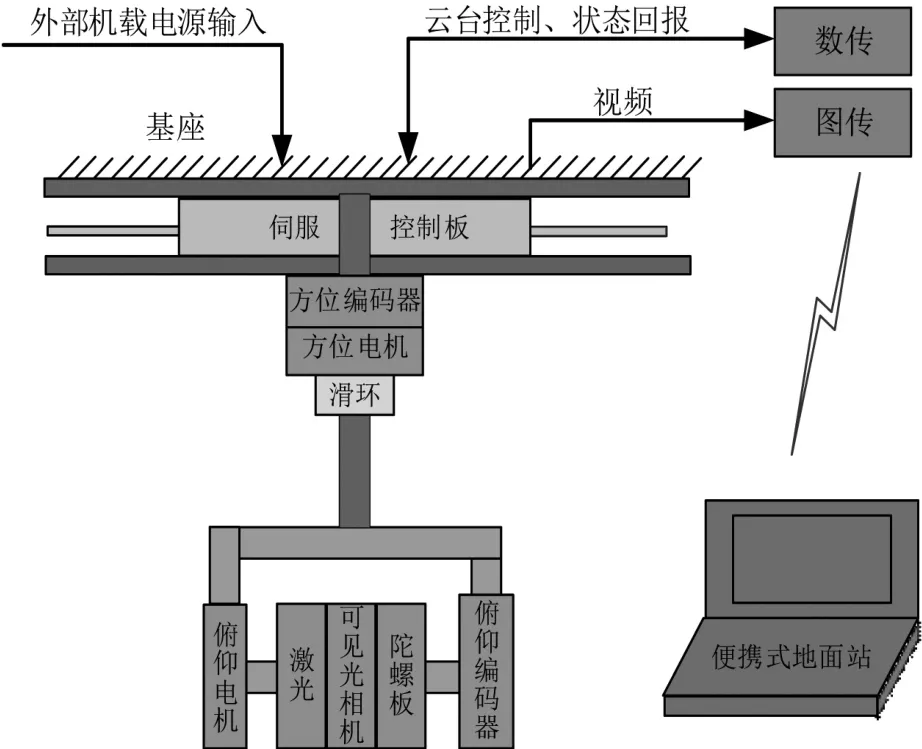
图6 三轴增稳云台结构组成框图
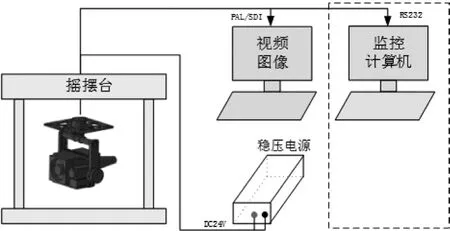
图7 基于无人机平台的激光清障控制系统

图8 系统给定2 °、2 Hz稳定精度测试曲线图
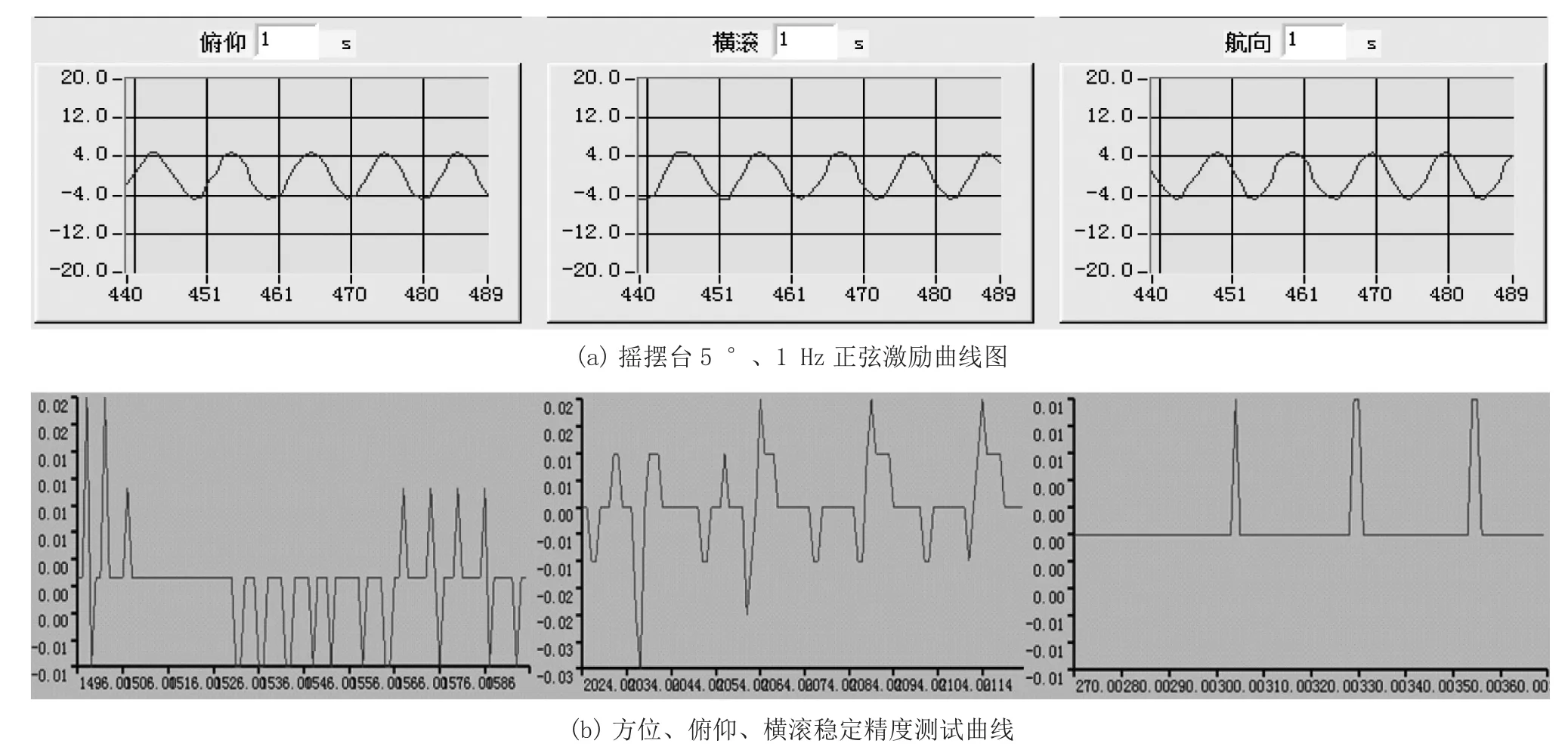
图9 摇摆台5 °、1 Hz稳定精度测试曲线图
5 结论
为了确保输电线路的安全、稳定运行,提出一种基于多旋翼无人机的机载激光清障一体化平台,利用多旋翼无人机搭载配有定制云台的激光清障系统执行架空线路清除异物的任务,通过大量的试验数据来看,在锁定目标后5 s左右的时间,实现了在不断电的情况下将异物清除,保障了线路及人身的安全隐患。
猜你喜欢
建筑施工(2022年3期)2022-07-18
科学与生活(2021年9期)2021-09-01
山西交通科技(2020年6期)2021-01-16
摄影之友(影像视觉)(2020年2期)2021-01-14
影像视觉(2020年2期)2020-03-19
科学(2020年6期)2020-02-06
电子制作(2019年23期)2019-02-23
电子制作(2018年9期)2018-08-04
摄影之友(影像视觉)(2017年11期)2017-11-27
电子制作(2016年1期)2016-11-07