
基于神经网络PID的下肢外骨骼轨迹跟踪控制系统
2020-11-23 01:48王璐陈柏滔张咏渤
理论与创新 2020年18期
关键词:模糊控制
王璐 陈柏滔 张咏渤

【摘 要】我国残疾人口众多,并且有大量的脑血管疾病或神经系统疾病患者,而这类患者多数伴有偏瘫症状。同时因交通事故而造成神经损伤或者肢体损伤的人数也越来越多。下肢外骨骼作为一种穿戴式智能化设备,可以精确记录训练过程中患者的训练数据,有效提高治疗的效率与效果。本文在精心设计下肢外骨骼机械结构的基础上,使用神经网络PID控制算法,建立了基于神经网络PID的下肢外骨骼轨迹跟踪控制系统。同时设计了模糊控制算法作为对比,实验结果表明,与模糊控制等其他算法相比,使用神经网络PID控制的下肢外骨骼对于给定轨迹具有优秀的跟踪和抗扰能力,具有良好的性能和鲁棒性。
【关键词】下肢外骨骼;神经网络PID;模糊控制;轨迹跟踪
引言
我国不仅残疾人口众多(约8500万),而且老龄化时代正在来临。在老龄人群中,有大量的脑血管疾病或神经系统疾病患者,而这类患者多数伴有偏瘫症状。近年来中老年患者因此而出现偏瘫的人数不断增多,并且在年龄上呈现年轻化趋势。同时,由于交通运输工具增多,因交通事故而造成神经损伤或者肢体损伤的人数也越来越多。膝关节作为下肢活动的重要关节,是人体最大,结构最为复杂的一个关节,极易受损,从而给患者的下肢活动带来非常大的困难。我国这类人口众多,存在着巨大的康复需求,而国内在康复领域的医护缺口巨大,智能化康复设备对于提升康复效果和缓解医护压力有着重要意义和价值。下肢外骨骼作为一种穿戴式智能化设备,不仅可以减轻康复医师的负担,还可以精确记录训练过程中患者的训练数据,有效提高治疗的效率与效果。
PID控制是目前使用最多、应用场合最广泛的控制方法,对于可以获得精确模型的被控对象来说往往可以获得较为理想的控制效果。而下肢外骨骼属于强耦合、非线性的时变系统,难以建立精确的数学模型,通过系统辨识等方法获得的近似模型也无法良好的代替真实系统。
为了解决此类系统的控制问题,很多控制算法被提出,典型的有:自适应滑模控制法、神经网络控制法、模糊控制等等。其中,反演法易于与自适应控制技术结合,但对所在环境的适应能力差。滑模控制是具有快速瞬态响应的鲁棒控制方法,但由于其自身的输入抖振问题会增加控制器的设计难度及降低系统的控制精度。
针对传统PID控制无法用于下肢外骨骼这种强耦合、非线性的时变系统的问题,本文提出了神经网络PID控制算法,利用神经网络实时计算PID控制器参数,从而达到良好的控制效果。
本文将首先建立下肢外骨骼机械模型,并使用神经网络PID控制法和模糊控制法的来设计下肢外骨骼控制系统。以模糊控制作为对比算法,考察神经网络PID控制方法的控制效果。
1.下肢外骨骼模型
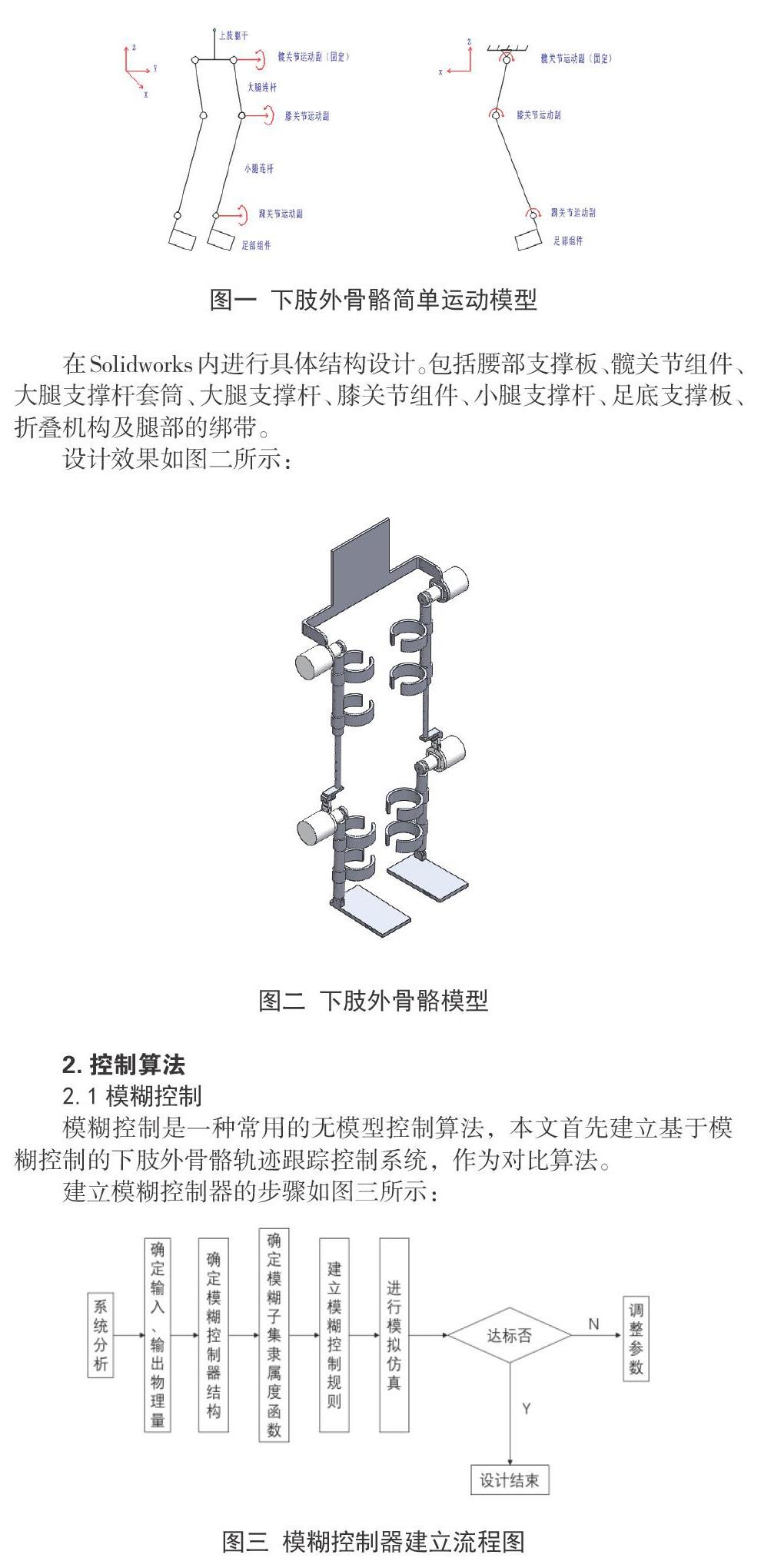
结合仿生学原理,行走过程通过附着在骨骼上的骨骼肌的收缩舒张运动,带动相关骨骼和关节运动,过程类似于四连杆运动。因此,采用杆件结构进行大腿、小腿部件结构的建模,考虑到受众人群人体尺寸的差异性,在设计过程中应实现大腿部件的可调节尺寸功能。结合人体髋关节、膝关节及踝关节的自由度设置,系统应设置成与人体关节相同的3个自由度的球副,但由于两个空间上不能够重合的球副,会很容易造成外骨骼与人体运动的偏差,从而给穿戴者造成身体上的损害,且本系统主要用于下肢康复,三个自由度略显冗余。因此结合结构的合理性,采用高副低代、减少康复以外无用自由度的方法将三个自由度的球副用一个转动副来代替。其中髋关节组件主体在康复过程中起到固定使用者的作用,因此髋关节运动副应固定在盆骨高度处。其次,踝关节运动在康复过程中起支撑使用者、矫正使用者站姿及维持使用者康复直立平衡的作用,因此踝关节运动副并非在康复过程中起到主要作用。在康复过程中为最大程度辅助使用者进行复健,特设置腰部支撑板、足底支撑板进行支撑定位。腰部支撑板、足底支撑板由于贴合人体,应在设计时考虑人机贴合情况,以便提升使用舒适度。
综上述,在髋关节和膝关节处设计四杆机构实现运动功能.利用安装在髋关节和膝关节处的驱动装置产生的运动,通过转动副带动关节的旋转运动,踝关节转动副通过被动运动进行人体直立状态的保持。下肢外骨骼康复系统的康复行为由髋关节、膝关节及踝关节的协同运动实现既定复健目标。整体系统的康复行为由三关节的运动来完成,因此整体系统的机械结构应结合上述人体尺寸参量进行设计。
康复过程中,人体在本下肢外骨骼康复系统的带动复健下,三个关节由驱动装置进行驱动旋转,同时三个关节在XOZ平面内可进行屈伸运动。
综上述,进行下肢外骨骼康复系统简单运动模型的建立,如图一所示:
在Solidworks内进行具体结构设计。包括腰部支撑板、髋关节组件、大腿支撑杆套筒、大腿支撑杆、膝关节组件、小腿支撑杆、足底支撑板、折叠机构及腿部的绑带。
设计效果如图二所示:
2.控制算法
2.1模糊控制
模糊控制是一种常用的无模型控制算法,本文首先建立基于模糊控制的下肢外骨骼轨迹跟踪控制系统,作为对比算法。
建立模糊控制器的步骤如图三所示:
本文按此步骤,选定角度误差为输入变量,力矩为输出变量建立一维Mamdani型模糊控制器。
根据人体关节角度运动变化确定角度误差论域[-1 1],输出论域[-536 536],选定Trim型隶属函数及范围,选择中心面积解模糊方法。
使用17个Trim函数覆盖输入变量的论域,使用15个Trim函数覆盖输出便论域,并根据控制目的设计17条模糊规则。
使用Matlab导入建立的下肢外骨骼模型,搭建模糊控制系统,如图四所示:
2.2神经网络PID控制
为了摆脱经典PID在下肢外骨骼上遇到的困境,引入BP神经网络实现PID控制参数的自适应学习。
单个神经元的拓扑结构如下圖五所示:
其中,是单个神经元的输入信号,为权值,调节各输入量对输出结果的影响权重,为单个神经元的阈值,只有当神经元接收信号到达阈值时,神经元变为激活状态。
单个神经元的线性加权净输入为:
单个神经元接收信号为:
神经元在变为激活状态后,通过“激活函数”的处理得到最后的输出结果,即单个神经元的输出为:
为评估神经元输出对期望输出的逼近程度,引入代价函数:
当代价函数值为0时,说明神经元输出值跟踪上了期望输出。每输入一个样本,便将实际网络输出与期望输出相比较,调整网络参数以使均方误差最小化,以使代价函数趋于0,达到训练目的。
使用梯度下降发调整函学习参数使得代价函数C得到最小值。
基于梯度下降法得到权重的改变量为:
其中,η为学习速率,用于调节学习步长。学习速率不可过大,否则学习参数的更新过程振荡严重,不易收敛,并且可能导致越过最优解;学习速率也不可过小,否则会使收敛时间过长,且会降低算法效率。
应用微分链式法则求代价函数C对权重w的偏導:
若激活函数采取常用的sigmoid函数,即,则代价函数C对权重wi的偏导为:
其中,是人为定义,称之为错误量。由此我们得到权值的更新公式为:
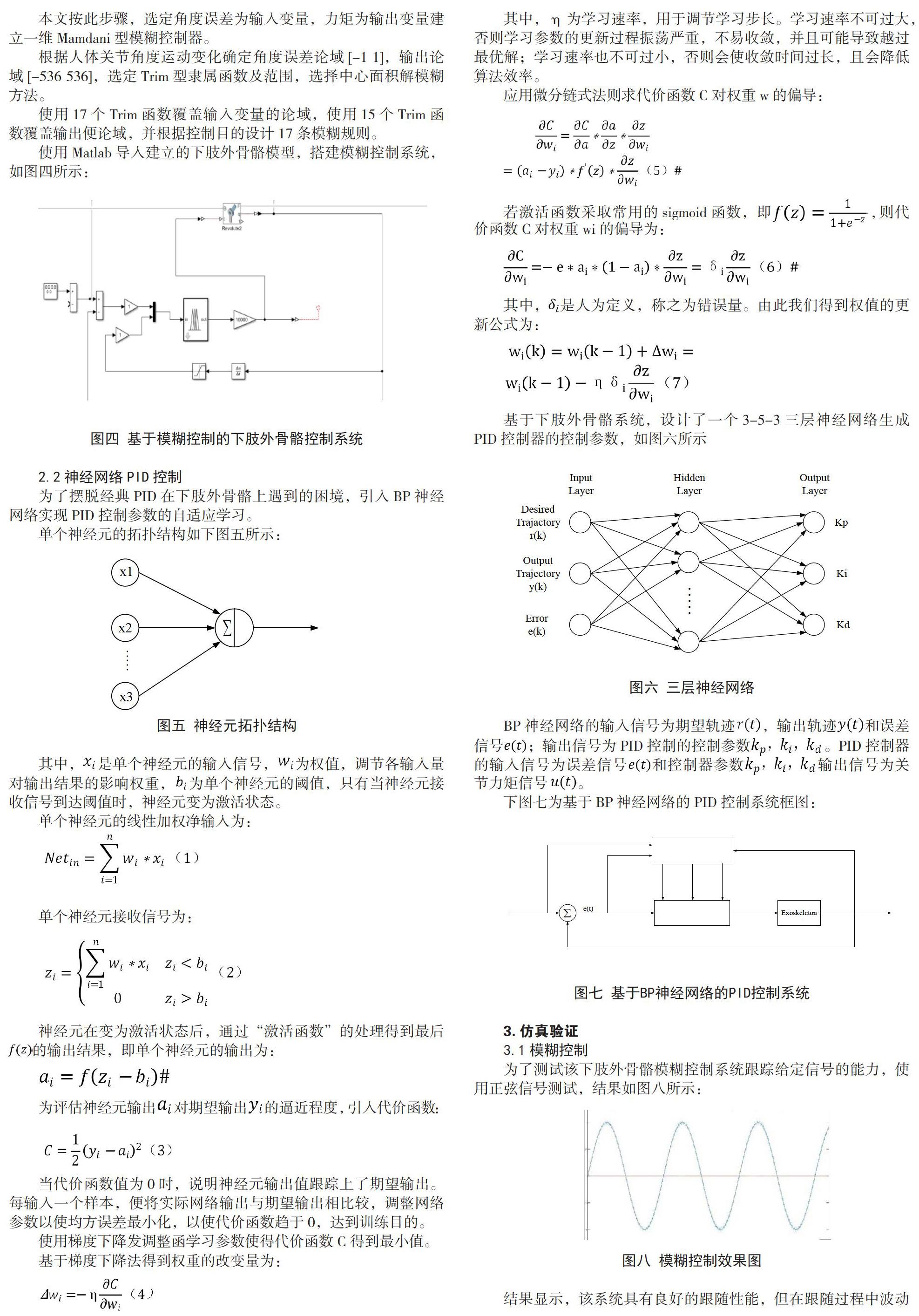
基于下肢外骨骼系统,设计了一个3-5-3三层神经网络生成PID控制器的控制参数,如图六所示
BP神经网络的输入信号为期望轨迹,输出轨迹和误差信号;输出信号为PID控制的控制参数。PID控制器的输入信号为误差信号和控制器参数输出信号为关节力矩信号。
下图七为基于BP神经网络的PID控制系统框图:
3.仿真验证
3.1模糊控制
为了测试该下肢外骨骼模糊控制系统跟踪给定信号的能力,使用正弦信号测试,结果如图八所示:
结果显示,该系统具有良好的跟随性能,但在跟随过程中波动较为频繁,为了改善系统的性能,可以考虑的解决方案是细化覆盖输出变量论域0邻域的隶属函数以及引入一个角速度输入变量细化控制,这样做的结果在提高控制效果的同时也会增加模糊规则个数,进而增大系统的运行时间。
3.2神经网络PID控制
(1) PID和BP-PID控制器在理想情况下的对比仿真:
基于S函数搭建BP串行神经网络的PID控制。S函数的输入信号有e(k),e(k-1),e(k-2),y(k),y(k-1),r(k),u(k-1),w(k-1),w(k),输出为控制力矩u(k),控制器参数kp,ki,kd,以及用于反馈的信号w(k)。在s函数里编写代码进行控制作用。
BP-PID的控制参数如图九所示:
根据控制器所得的参数,我们选取PID的参数为Kp=340,Ki=330,Kd=15,进行仿真实验。得到膝关节响应曲线和误差和误差曲线如图十所示:
在人机交互的过程中,各种不确定因素都会导致系统外部参数发生一定变化,要求控制器能保持较好的跟踪效果和鲁棒性。
从仿真图的对比可以看出,PID和BP-PID均可在短时间内迅速完成对关节的运动的跟踪过程,控制量相对平滑,几乎没有抖振,误差幅度在0.02以内,实现基本的无差跟踪。
BP-PID控制器在开始的两秒内抖动较PID控制器剧烈,这是由于神经网络需经历一个自适应生成控制器参数的过程,但完成自适应的过程后,其相较于期望轨迹的误差更小,其跟踪性能更为优越,实现了精确的轨迹跟踪。
结果显示,经神经网络PID控制后的膝关节外骨骼对于输入信号具有优越的跟踪能力,对于输入信号产生变化的反应速度迅速,抗扰能力优秀。从而证明了神经网络PID控制算法的准确性、精确性和鲁棒性优秀。
(2)考虑动态及环境干扰等情况下的对比仿真:
在实际应用中,系统可能包含一些环境干扰和建模过程忽略掉的动态特性,本文采用白噪声模拟未建模动态和环境干扰,以验证控制器的适应性和稳定性。选择干扰信号达到输入信号的10%,设置白噪声功率为0.01,如图十一所示:
加入噪声后,膝关节响应曲线和误差曲线如图十二所示:
在白噪声下,BP-PID仍具有更优秀的性能,且抑制噪声作用强。
在添加干扰后,对于系统输出特性来说,基本和没有加噪声之前吻合,误差幅度仍在0.01以下。在面对噪声干扰,BP-PID控制器仍有着更明显的优势,在不断克服干扰中实现系统的稳定输出。
4.结论
本文在精心设计的下肢外骨骼机械结构的基础上,针对强耦合、非线性时变的下肢外骨骼系统,建立了下肢外骨骼机械模型,使用神经网络方法和模糊控制方法进行了控制系统设计。
实验结果表明,模糊控制具有良好的跟踪能力,但是稳定性有所欠缺,而神经网络控制无论在稳定性、精确性、鲁棒性等方面都具有良好的性能。
参考文献
[1]陈成.基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真[D].南京理工大学,2017.1-7
[2]王强.可穿戴下肢外骨骼康复机器人机械设计与研究[D].电子科技大学,2014.1-9
[3]姜充. 康复下肢外骨骼协调控制系统的研究[D].东南大学,2017.
[4]牛彬.可穿戴式的下肢步行外骨骼控制机理研究与实现.浙江大学硕士论文.2006
[5]罗育浩. 外骨骼机器人膝关节设计与控制[D].中国科学院大学(中国科学院深圳先进技术研究院),2018.
[6]葛媛媛,张宏基.基于自适应模糊滑模控制的机器人轨迹跟踪算法[J].电子测量与仪器学报,2017,31(05):746-755.
[7]刘来运,樊军.农用下肢外骨骼机构设计及仿真分析[J].机床与液压,2017,45(17):15-19.
[8]D. Wang, K. Lee, J. Guo and C. Yang, "Adaptive Knee Joint Exoskeleton Based on Biological Geometries, in IEEE/ ASME Transactions on Mechatronics, vol.19, no.4, pp.1268-1278,Aug.2014.
[9]Kristel Knaepen, Pieter Beyl, Saartje Duerinck, Friso Hagman, Dirk Lefeber, Romain Meeusen, "Human–Robot Interaction: Kinematics and Muscle Activity Inside a Powered Compliant Knee Exoskeleton" , Neural Systems and Rehabilitation Engineering IEEE Transactions on, vol.22, no.6, pp.1128 - 1137, Nov.2014.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学家(2016年3期)2016-12-30
科学与财富(2016年26期)2016-12-01
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年7期)2016-05-19
计算技术与自动化(2015年4期)2016-03-25
物联网技术(2015年4期)2015-04-27
