
车联网环境下信息交互形式对驾驶行为的影响
2020-11-24 07:46张晋崇
科学技术与工程 2020年29期
张 捷, 张晋崇
(1.内蒙古农业大学能源与交通工程学院, 呼和浩特 010018; 2.武汉理工大学智能交通系统研究中心, 武汉 430000;3.中汽研汽车检验中心(天津)有限公司, 天津 300300)
车联网是由无线通信系统、车载电脑系统、显示系统、声音系统以及其他子系统共同构成的汽车综合网络系统,利用无线通信系统实现汽车联网。传统车联网是以人为主体,应用于车辆监控和获取服务信息,其中包括紧急救援、防盗追踪、车辆调度等服务,通过车与车、车与路、车与网、车与人等的互联互通,整合行车记录仪、车载导航等设备功能,交互车辆位置、速度和路线等信息,解决安全驾驶问题。由于驾驶是一项复杂任务,占用了驾驶员的大量视觉与认知资源,而人存在认知极限,因此,一些研究者对车联网信息的使用有争议[1-5]。有研究者指出,这些信息会使驾驶员注意力分散,带来安全隐患[1]。这种基于车辆通信的联网信息如何设计能帮助驾驶员提高驾驶安全,成为了一个亟待探讨的问题。
Frederik等[1]发现自动驾驶的系统限制了部分驾驶员性能。驾驶模拟器实验中,驾驶员遇到了不同的情况,部分自动驾驶的汽车不再能够安全地保持横向引导。Ericson等[2]提出语音识别(V-R)系统可能会降低各种车载系统和智能手机交互的视觉-手动(V-M)需求。但是,还不完全了解集成在使用的V-R系统影响驾驶员注意力的程度。Arie[3]为了探索驾驶员-车辆接口如何车联网这种角色更改后支持驾驶员,测试了3种场景,一种仅提供声音警告。一种在方向盘后方显示状态信息和警告,一种在座板中使用照明和触觉反馈来将注意力引向车辆外部并刺激反应。Oscar等[4]研究结果表明,为了减少对驾驶员影响,应阻止诸如文本和浏览之类的视觉-手动交互,但允许诸如GPS和蓝牙之类的支持驾驶的应用程序。张辉等[5]为了探寻驾驶人分心判别方法,构建了驾驶人分心状态判别模型。
驾驶人的操作行为因素(如方向盘转动、油门踏板、刹车踏板、车道控制、横向操作稳定性、转向特征等参数)和车辆状态指标(主要包括车辆速度、加速度、车间距、车辆侧向偏移情况、方向盘调整状况等)反映了驾驶人的应急决策能力、车辆控制能力、动态感知能力、危险感知能力[6]。通过设计不同形式的车联网驾驶场景进行模拟驾驶实验,通过方向盘转角标准差和车辆侧向偏移的极值两个指标,阐述驾驶人在不同类别的车联网信息形式下的应急决策能力和车辆控制能力,并构建分心驾驶模型。
1 研究方法
1.1 被试
实验共组织12个被试驾驶人进行模拟驾驶实验(图1),其中女性2名,男性10名,被试驾驶人年龄为25~37岁,平均年龄31,驾龄在2~10 a,平均驾龄5 a。被试基本信息如表1所示。

图1 驾驶人进行模拟驾驶实验Fig.1 Drivers conduct simulated driving experiments

表1 被试基本信息Table 1 Basic information of the participants
1.2 实验设备
实验的仪器和设备主要包括Forum8汽车驾驶模拟器、数据采集系统、Face LAB眼动仪和摄像机。
眼动数据主要用来分析驾驶人在车联网信息时的眼睛注视特征及行为变化,基于以上需求选取的重要数据指标包含世界坐标中视线矢量在屏幕上的交点[GSI_SCREEN_X(Y)]和视线扫视数据(SACCADE)。采用Forum8汽车驾驶模拟器和Face LAB眼动仪采集的客观参数指标如表2所示。
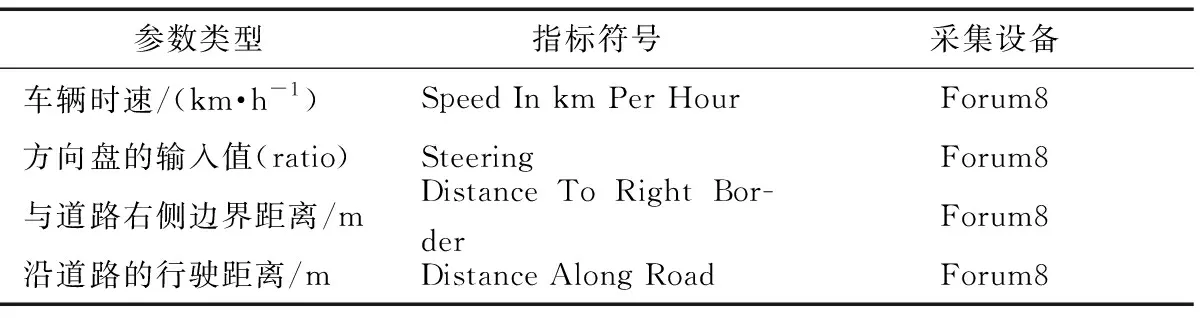
表2 驾驶分心间接客观指标及说明Table 2 Indirect objective indicators and explanations of driving distraction
1.3 问卷设计
对被试的相关基本信息和驾驶习惯进行问卷调查,便于与模拟驾驶实验数据结合,进行相关分析。问卷分为两个部分:实验前填写的驾驶人基本信息问卷和实验后填写的开车时车联网信息导致的分心驾驶的体验问卷。驾驶人基本信息问卷涵盖了驾驶人的姓名、性别、年龄和驾龄等基本信息;分心驾驶相关的体验问卷用来统计和分析被试驾驶人平常开车的驾驶习惯。
1.4 分心驾驶道路场景组合式设计
共设计3条路段分别为自由行驶路段、跟车路段和换道超车路段,在这些路段中包含了自由驾驶任务、跟车任务、换道任务和超车任务。其中,在自由行驶路段,实验驾驶人自由行驶,主要收集正常驾驶的驾驶行为数据,作为分心驾驶的实验的对照组;跟车路段和换道超车路段则是设定了特定的驾驶分心任务。
实验场景是由研究人员为该实验设定的道路特性、交通流特性及环境特性组成。实验所用道路为城郊快速公路,道路两旁加入绿化树木和必要的交通指示牌,实验路段加入极少量的交通流,营造真实驾驶场景的同时防止对实验车辆造成影响。所有路段最高限速为80 km/h,与车联网信息的分心驾驶相关的道路均为双向六车道,单车道宽3.75 m。道路场景设计方案如表3所示。

表3 道路场景设计方案Table 3 Road scene design scheme
2 不同消息方式的驾驶行为分析
2.1 横向驾驶行为特征分析
对被试的方向盘转角进行描述性分析得到表4。由表4中的方向盘的标准偏差可知,驾驶人在查阅文字消息的标准偏差为4.681,查阅语音消息的标准偏差为2.151,两者均比正常驾驶的标准差1.194要大得多,这表明驾驶人在查阅消息时的方向盘转动幅度较大,方向控制能力下降,且阅读文字消息时的方向控制能力比收听语音驾驶车辆时更弱。
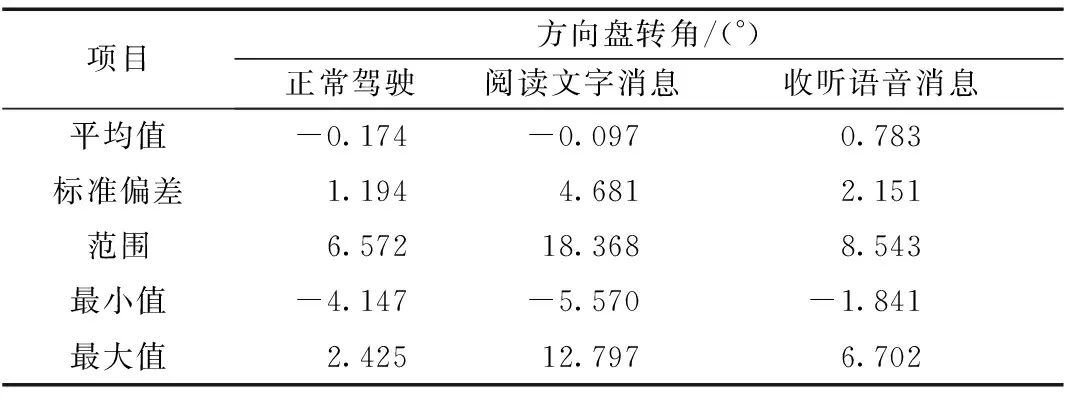
表4 查阅消息时的方向盘转角Table 4 Steering wheel angle
对被试驾驶人的两种查阅消息的车辆侧向位置偏离值进行描述性分析得到表5。由表5中的范围可知,驾驶人在正常驾驶时的车辆侧向偏移范围在0.407 m以内,查阅语音消息时的车辆侧向偏移范围为0.453 m,而查阅文字消息时的车辆侧向偏移高达1.008 m,这表明驾驶人在查阅消息时的车辆侧向偏移范围较大,车道保持能力下降,且阅读文字消息时的车道保持能力比收听语音驾驶车辆时更低,更容易发生擦碰事故。
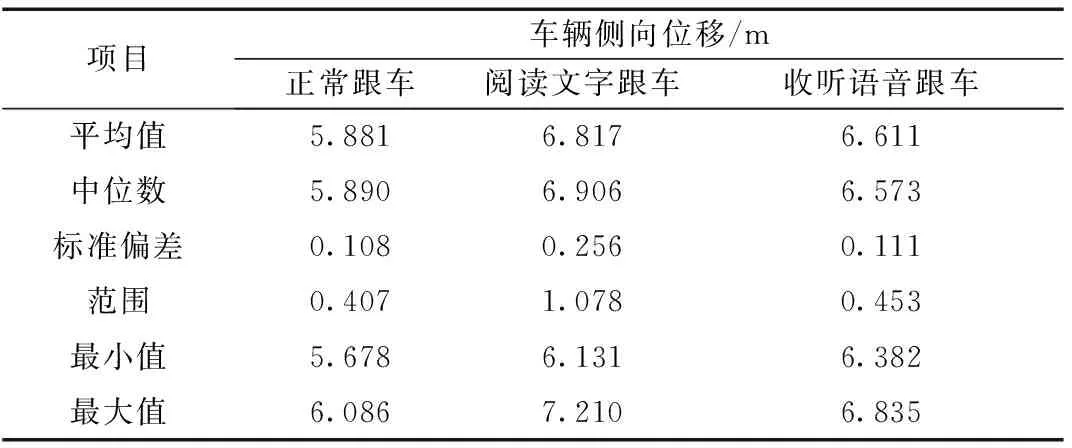
表5 查阅消息的车辆侧向位移Table 5 Lateral displacement of vehicles
为了更直观地对比两种查阅消息的分心驾驶与正常驾驶的车辆纵向位置偏移情况,用MATLAB绘图功能把驾驶人的车辆纵向位置曲线绘制在道路上,如图2所示。图2中两条虚线为中间车道的两条内侧边界线,正常驾驶的车道轨迹,较为平缓且基本处于道路中央;查阅文字消息时的车辆侧向偏移,在车道上有较大的偏离幅度,很不稳定;查阅语音消息的车道偏移轨迹,有小幅度的偏离。
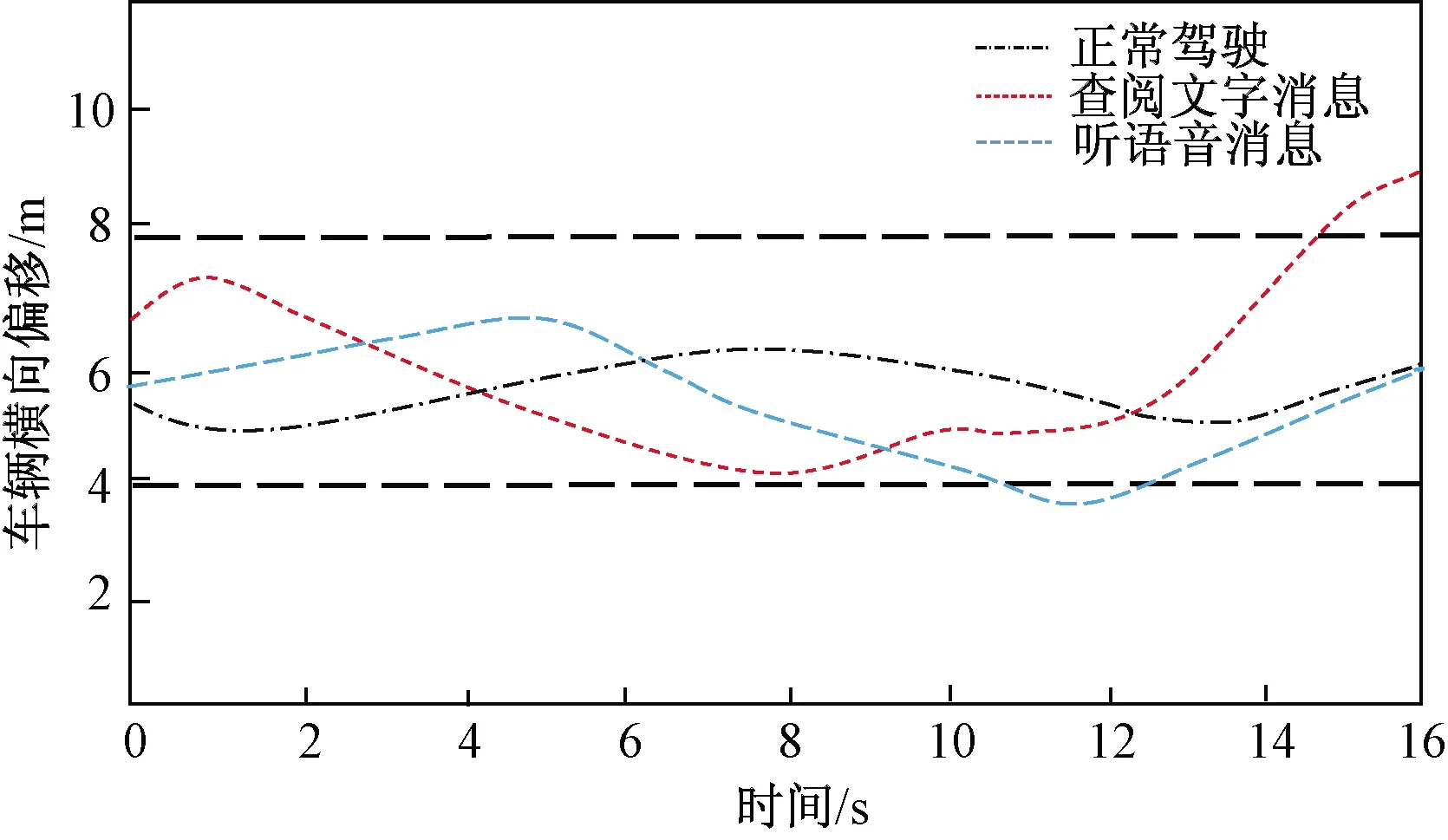
图2 两种查阅信息分心的车辆纵向位置Fig.2 Longitudinal positions of two vehicles with distracting information
2.2 纵向驾驶行为特征分析
对被试开车时查阅信息的时速进行统计分析得到表6。由表6的正常驾驶时的平均时速68.081 km/h要高于收听语音信息驾驶的时速平均值61.357 km/h和阅读文字消息驾驶的时速平均值53.948 km/h,驾驶人会通过降低车速,减少驾驶任务需求,来增加驾驶的安全感,预防可能出现的交通安全事件。
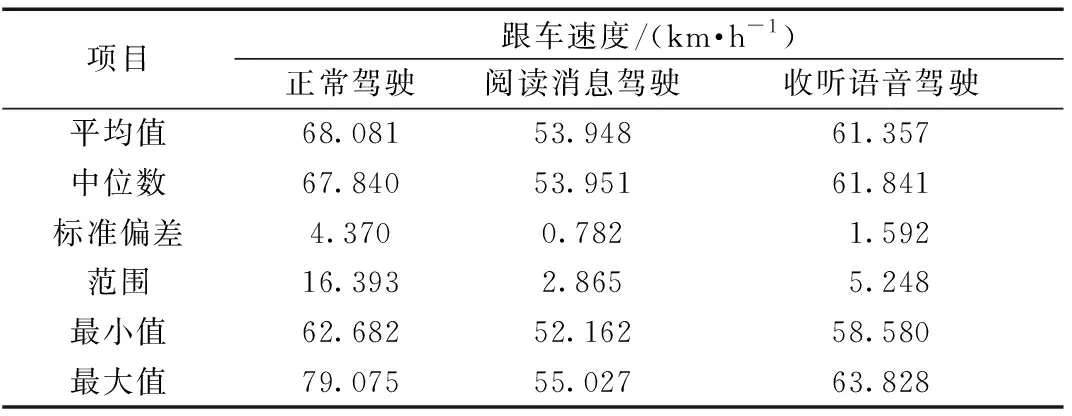
表6 查阅消息时的跟车速度Table 6 Check the following speed of the message
对被试者跟车时查阅消息的跟车距离进行统计分析得到表7。由表7可见,正常跟车时的跟车平均距离要小于两种阅读信息跟车的平均跟车距离。该参数表现出来的特征和分心驾驶车速表现出来的特征相吻合,表明驾驶人在查阅消息时会通过降低车速,增加跟车距离来满足驾驶时心理的安全感。
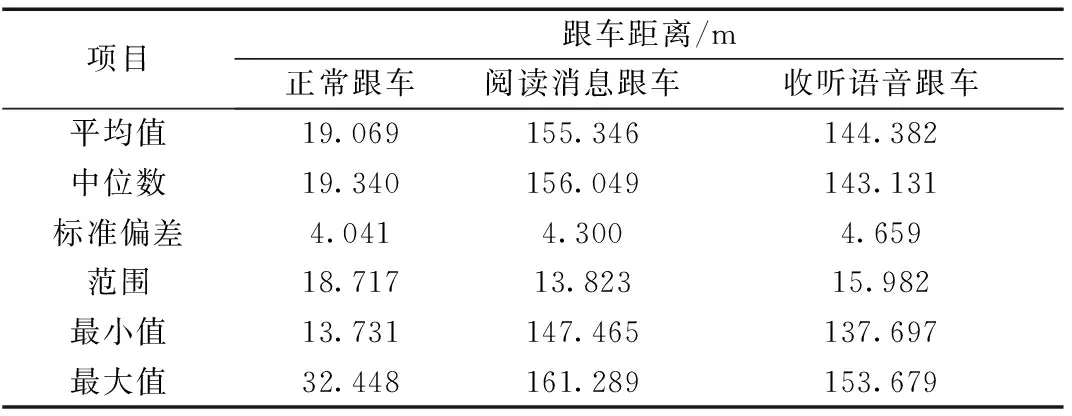
表7 查阅消息时的跟车距离 Table 7 Vehicle following distance when checking messages
3 基于模糊综合评价模型的分心驾驶影响研究
分心驾驶行为和道路交通安全的关联性研究为模糊、不精确的判定问题[7], 驾驶人开车时使用车联网信息所潜在的风险因素很大一部分是模糊的,分心状态等级也难以精确界定。模糊综合评价方法借用模糊数学的原理,建立隶属度函数和模糊隶属度矩阵来综合评价驾驶人开车的分心程度,是处理不确定性问题的有效方法。因此,运用模糊综合评价法评价驾驶人的驾驶分心程度是可行的。利用模糊综合评价方法的隶属特性和模糊特征,对驾驶行为特征参数的隶属分心等级进行建模,构建不同车联网信息形式下行为特征参数值的分心模型,用于评判不同分心任务下的驾驶分心等级,从而对驾驶过程中的不同形式的车联网信息对行车安全的影响做对比分析。
3.1 评价因素集和决策评语集的确定
驾驶分心的程度采用车辆侧向偏移极值和方向盘转角标准差这两个参数指标来衡量。因此,建立因素集如式U={u1,u2},式中:u1为车辆侧向偏移的极值,即最大值与最小值的差值,u2为转向盘转角的标准偏差。
把被试驾驶人的驾驶分心程度分为正常、临界、分心和严重分心,建立决策评语集:V={v1,v2,v3,v4}={正常,临界,分心,严重分心}。
3.2 隶属度函数的确定
由于选取的两个评价指标车辆侧向偏移的极值和方向盘转角标准差的量纲不同,会导致实验数据的值有较大的差别,这会影响模型建立和评价结论的准确性。故在建立评价模型前要先对指标进行量纲的标准化[8]。

(1)
式(1)中:maxxk为数据集合{xk}中的最大的数值;minxk为集合中的最小值。
然后,求出由2个评判因素的评判集构造的一个因素论域U到决策评语论域V上的一个模糊关系,即评判决策矩阵为
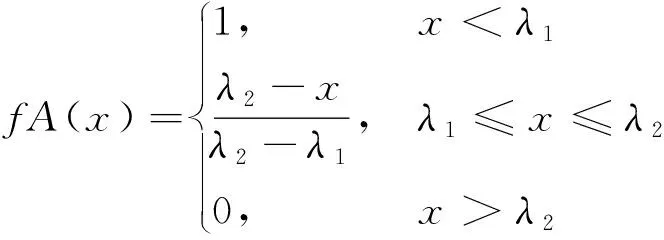
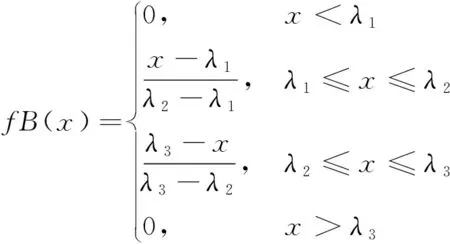
由式(3)可知,评判决策矩阵R的因素rij可以用隶属度函数求出。由决策评语集可知把驾驶人的分心等级划分为正常(A)、临界(B)、分心(C)和严重分心(D),每个分心等级对应的隶属度函数如下。
(2)
(3)

(4)
(5)
式中:λ1、λ2、λ3、λ4是每一个判定等级的相对应的阈值,采用的阈值标定方法是累计百分数的统计方法。需要注意的是模糊综合评价模型确定隶属度阈值采用的方法为累计频率百分位法,其特点就是隶属度函数阈值会随着原始数据改变,这就使得利用该评判模型得到的评价结果具有内部对比的相对性,即用该评价模型对2种不同的车联网信息形式评判所得结果具有相对性。
把通过无量纲标准化的评判指标数据依次代入隶属函数,即可解出评判决策矩阵R。
再根据前期的调研和理论研究,把选取的2个评价指标相对重要程度的权重[9]。
确定A=(0.5,0.5)。
根据评判结果的式子,可以通过得到综合评判结果B=A·B=(b1,…,b4),表示各种评语的隶属度。对评判结果进行归一化处理,得到向量f=(f1,f2,…,f4),其中:

(6)
3.3 模糊综合评价模型
为了对各个分心任务的分心程度做出定量的评判,对评语集的分心等级进行赋值[10],引入标度定义。根据标度定义,把f1对应的正常状态赋值为0.2,把f2对应的临界状态定义为0.5,把f3对应的分心状态定义为0.7,把f4对应的严重分心定义为0.8。为了得到百分制的评判值,对赋值系数进行去百分号化,即系数分别为20、50、70、80。因此,可确定各个分心驾驶的分心程度综合评判值为
h=20f1+50f2+70f3+80f4
(7)
4 验证实验
对不同形式的车联网信息进行分心程度的横向对比,分析编号D1、D2、D3、D4这4个被试驾驶人的方向盘转角和车辆侧向偏移数据,对方向盘转角标准差和车辆侧向偏移极值取算术平均值,作为原始数据,并进行无量纲化处理,得到两种形式的分心评价指标数据,如表8所示。

表8 评价指标数据Table 8 Evaluation index data
利用所建立的模糊综合分心评判模型对2种不同的车联网信息形式进行评价。首先采用累计百分位数的方法对正常、临界、分心、严重分心4个层次的隶属度函数的阈值λ进行标定。标定过程如下,先计算方向盘转角标准差和车辆侧向偏移极值2个评判指标所对应的两种车联网信息形式的无量纲化数值,根据无量纲化数值计算出该分心任务的频率,把2种评判指标各自对应的信息形式频率按照从小到大的顺序进行重新排序,然后计算各个指标的累计频率,如表9所示。

表9 评价指标无量纲化数据积累频率分布Table 9 Frequency distribution of dimensionless data accumulation of evaluation indexes
根据表9,利用插值法得出累计频率位于20%、40%、60%、80%所对应的评判指标的无量纲值,把这4个无量纲值作为4个隶属度函数的阈值。所得阈值如表10所示。
将表10中的方向盘转角标准差和车辆侧向偏移极值的隶属度函数阈值λa={λ1,λ2,λ3,λ4}={0.31,0.51,0.85,0.97}和λb={λ1,λ2,λ3,λ4}={0.35,0.72,0.93,0.96}分别代入式子(2)到(5),即得出方向盘转角标准差和车辆侧向偏移极值的隶属度函数。

表10 两个指标对应的隶属度函数阈值Table 10 The membership function thresholds corresponding to the two indicators
得到上述隶属函数阈值,可以把方向盘转角标准差对分心评语集V={正常,临界,分心,严重分心}的隶属度函数画在同一坐标系中,如图3所示。

图3 方向盘转角标准差的指标隶属度函数Fig.3 Index of the steering wheel angle standard deviation membership function
同理,有了车辆侧向偏移极值,也可以把车辆侧向偏移极值对分心评语集V={正常,临界,分心,严重分心}的隶属度函数画在坐标系中,如图4所示。
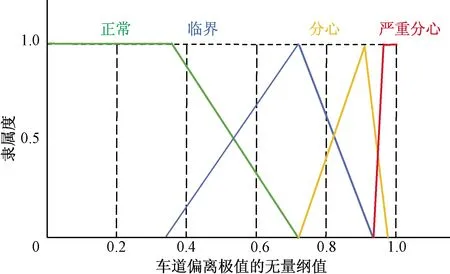
图4 车辆侧向偏移极值的隶属度函数Fig.4 Diagram of membership function of vehicle lateral offset extremes
将隶属度函数阈值λ和2种信息形式对应的无量纲化值代入隶属度函数式(2)~式(5),即可得出各个分心驾驶任务的关系矩阵:

(8)
式(8)中:关系矩阵的下标1和2分别代表两种通信形式:查阅读文字和语音消息。
根据式子B=A·R=(b1,…,bn) 得到综合评判结果模糊集为
B1=(0,0,0,1),B2=(0.448,0.565,0.030,0)。
对以上2个模糊集进行归一化处理后,将得到的向量代入式(7)得到2种通信形式的最终分心程度得分为
h1=80×1=80;
h2=20×0.43+50×0.54+70×0.03=37.7。
由上述分心程度得分可知,查阅文字消息的分心得分为80分,听语音消息的得分为37.7分。由此可得文字形式的车联网信息比语音形式的车联网信息更能导致驾驶人的分心。根据美国哈佛商学院的一份分析资料表明[11],人的大脑每天通过5种感官接受外部信息的比例分别为味觉1%、触觉1.5%、嗅觉3.5%、听觉11%、视觉83%。因此,当驾驶员查看文字消息时,视觉接受信息的比例由驾驶任务往车联网文字消息转移,因此对行车安全造车的不良影响更大。
5 结论
由上述结果分析可见:通过构建模糊综合分心评价模型对不同车联网信息形式对驾驶行为的分心影响进行评判,并横向对比不同车联网信息形式对行车安全的影响。得到的结果为文字类分心任务对驾驶行为的影响比语音类分心任务的分心影响更大,这与文字分心时需要更多地分配注意力到屏幕上,对接收前方道路信息产生干扰,不能及时调整车辆方向和速度有关,以致对行车安全造成更大威胁。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
今日农业(2020年16期)2020-12-14
模具制造(2019年10期)2020-01-06
红土地(2019年10期)2019-10-30
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
汽车文摘(2015年11期)2015-12-02
汽车零部件(2014年5期)2014-11-11
