利用最小二乘支持向量机求解潜艇内外磁场映射模型*
2020-12-07 09:25刘胜道何保委赵文春周国华
国防科技大学学报 2020年6期
刘胜道,何保委,赵文春,周国华
(海军工程大学 电气工程学院, 湖北 武汉 430033)
磁隐身技术是保障潜艇生命力的重要手段,主要方法是潜艇定期前往消磁站进行消磁处理,以降低大部分固定磁场;其次,消磁系统能够有效地补偿感应磁场和部分剩余固定磁场。由于地球磁场、海浪冲击、铁磁设备运行等因素影响,潜艇的固定磁场会逐渐积累,最终超出控制指标,而目前的消磁系统不能实时监测和补偿固定磁场的变化[1-2]。为实现对潜艇生命力的最佳保护,提高消磁保障效率,应对潜艇的固定磁场进行实时跟踪和补偿。
由内部磁场来推算外部磁场是其中一种有效的监测手段,即在潜艇内部特征位置安装多个磁传感器,通过测量潜艇内部磁场来实时推算其在某一深度或高度的磁场值。文献[3-5]推导了基于虚拟磁源法的磁场推算模型,文献[6]在此基础上进行了空心圆筒实验;文献[7-8]采用了径向基神经网络算法,并提高了推算精度。上述实验中,内部磁传感器悬吊在船模内部的方式并不符合实际。从安全性出发,内部磁传感器一般布置在两层壳体之间,此时传感器距离壳体和铁磁设备非常接近,其测量值所受影响也相当大,而且固定磁场的变化具有不确定性,因此其外推方法一直制约着闭环消磁技术的发展。
在舰艇消磁勤务中,通常十数次通电即可完成消磁任务,而神经网络算法一般需要大量数据用于训练模型,传统的深度换算更不可能进行外部磁场推算。本文提出了基于最小二乘支持向量机(Least Squares Support Vector Machine, LS-SVM)的潜艇内外磁场映射方法,采用双壳体潜艇模型作为实验平台,将内部磁传感器布置在夹层之间,以潜艇外部垂向固定磁场为研究对象,进行了仿真分析和艇模实验。
1 基于LS-SVM的磁场映射原理
1.1 内外映射法原理
磁场的变化来源于磁矩的变化[5]。对于同一个磁源来说,测量点的磁场变化量与磁矩变化量的关系式为:
ΔH=C·ΔM
(1)
式中:ΔH是磁场变化量,C是测量点磁场和磁源的关系矩阵,ΔM是磁矩变化量。
对于同一艘潜艇,可以分别得到其内外磁场与磁源的关系。
(2)
其中:ΔHn和ΔHw分别是潜艇内外磁场变化量,Cn和Cw分别是内外磁场和磁源的关系矩阵,[ΔM1ΔM2…ΔMk]是每一个磁矩的变化量。
式(2)最终可化为:
ΔHw=K·ΔHn
(3)
式中,K是由内到外的磁场映射矩阵。测量点一旦固定,K即为常数。这表明只需得到多组潜艇内外磁场值用于求解K,即可通过内部磁场直接推算出外部磁场。
1.2 LS-SVM原理
潜艇内部结构复杂,铁磁设备繁多,固定磁场在航行过程中不断积累和变化,具有不确定性,直接求解K十分困难。
最小二乘支持向量机是基于支持向量机的改进算法,它区别于神经网络中依赖样本数量的经验风险最小化原理,采用了结构风险最小化准则[9],不单纯追求损失函数最小化,有效避免了在小样本条件下的过拟合现象。
LS-SVM用于回归预测的基本思想是将样本映射至高维空间,通过构建决策函数,把非线性问题转化为线性问题。LS-SVM能够解决具有小样本、特征点多、局部变化等特点的分类与回归问题,非常适用于解决固定磁场推算这类应用。其基本原理如下:
给定样本D={(xi,yi),i=1,2,…,k,xi∈Rm,yi∈Rn},xi和yi分别为输入和输出矩阵,通过映射函数φ(x)将样本映射至高维空间。
y=ωΤφ(x)+b
(4)
式中:ω为权值矩阵,b为偏置量。
基于结构风险最小化原理,该模型需要解决以下规划问题:
(5)
yi=ωΤφ(xi)+b+ei,i=1,2,…,k
(6)
其中:J为惩罚函数,e为输出误差,γ为惩罚参数。
此时对式(5)和式(6)引入拉格朗日函数,则有:
(7)
式中,∂i为拉格朗日系数。
分别对参数ω、b、e、∂求偏导,根据KKT条件[10]消除变量ω和e,式(4)的最终回归函数为:
(8)

1.3 交叉验证法优化LS-SVM参数
LS-SVM模型参数的选取对训练效果影响巨大,其中最主要的是样本惩罚参数γ和核函数参数σ,常用的寻优方法有交叉验证法、粒子群算法、网格搜索法和遗传算法[11]等。采用网格搜索法结合10折交叉验证法来寻找最佳参数,优化映射模型,既能保证训练精度也能满足训练效率。交叉验证法基本流程如下:
步骤1:不重复抽样将原始数据随机分成10份。
步骤2:每一次挑选其中1份作为测试集,剩余9份作为训练集。
步骤3:多次重复步骤2,使得每个子集都有一次机会作为测试集。
步骤4:每次训练得到一个模型,用这个模型在测试集上测试,保存模型的参数指标。
步骤5:计算10组测试结果的误差平均值作为该模型的最终性能指标。
2 仿真分析
2.1 建模准备
仿真分析采用双壳体潜艇简易模型,其参数见表1。
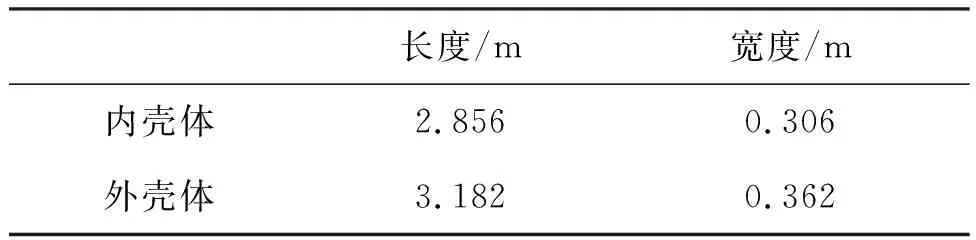
表1 潜艇模型参数
表1中,艇模的磁导率为200,内部含有若干小立方体壳模拟铁磁设备。27个内部磁传感器环绕内壳沿艇模纵向分布,15个外部磁传感器沿龙骨正下方放置于标准测量平面,如图1所示。

图1 艇模内部示意图Fig.1 Sketch map of submarine model
将艇模剖分成若干单元,每个单元的磁化强度可认为是常数。由积分方程法[12]反演得到磁矩,通过改变固定磁矩大小,同时得到若干组内外固定磁场用于后续的数值计算。值得注意的是,任何物体的磁矩都不是独立的,相邻的磁矩间存在连续性,即单个磁矩不能发生过强的突变。因此,在给定磁矩变化量时,相邻磁矩的变化量必定是连续变化的。积分方程法流程如图2所示。

图2 积分方程法流程图Fig.2 Diagram of integral equation method
2.2 仿真结果
仿真共获取100组内外磁场值,将第一组作为测试样本,其余组作为训练样本,研究在样本数目不同的情况下,对外部磁场推算结果的影响。定义误差计算公式为:
(9)
式中:ΔH′w为推算值,ΔHw为仿真值,n为外部测量点数。
将外部垂向磁场仿真值作为标准值,分别计算LS-SVM算法和径向基神经网络(Radius Basis Function Neural Network, RBFNN)算法推算值的误差,结果见表2。
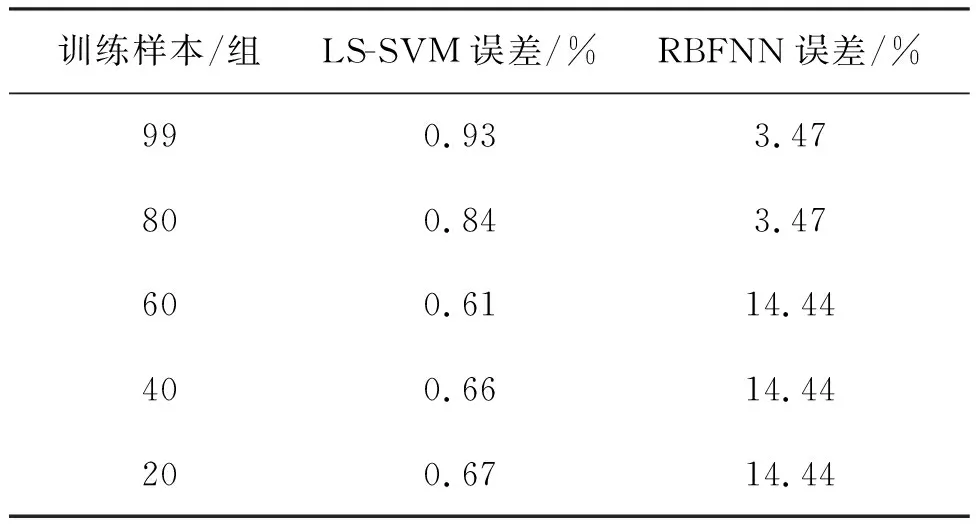
表2 训练样本不同时LS-SVM和RBFNN推算误差比较
由表2可知,随着训练样本的减少,LS-SVM算法的误差相差不大,而RBFNN算法因为失去了部分有效数据,误差有所增大。
因此,将每一组数据作为测试样本,其余99组作为训练样本,得到每一组测试样本所对应的外部磁场推算值,推算误差如图3所示。

图3 仿真分析下LS-SVM和RBFNN推算误差比较Fig.3 Extrapolation error comparison of LS-SVM and RBFNN of simulated analysis
最小二乘支持向量机的推算精度明显优于径向基神经网络算法,其误差一般在4%以下,最大误差为10.02%。由于固定磁场变化复杂,训练样本过少,造成RBFNN推算结果误差很大甚至失真。相比之下,LS-SVM能够降低因上述问题所带来的误差。
3 艇模实验
3.1 实验设计
在潜艇的两层壳体之间布置27个三分量磁传感器作为内部测量点,潜艇模型外壳封装完毕后,将其放在测量平台上,在龙骨正下方标准测量深度平面放置15个磁传感器作为外部测量点。实验过程如下:
步骤1:测量艇模原始磁场。
步骤2:随机改变纵向、横向或垂向补偿线圈电流,同时给工作线圈施加交变衰减的电流,从而改变艇模的固定磁场。
步骤3:每次通电完毕后,断开所有电流,记录此时的内外磁场值,再进行下一次通电。
步骤4:将所有磁场值汇总处理。
3.2 实验结果
实验共获取100组磁场值,取其中1组作为测试样本,其余99组作为训练样本,得到每一组测试样本所对应的外部磁场推算值。将外部垂向磁场测量值作为标准值,分别计算LS-SVM算法和RBFNN算法推算值的误差,结果如图4所示。
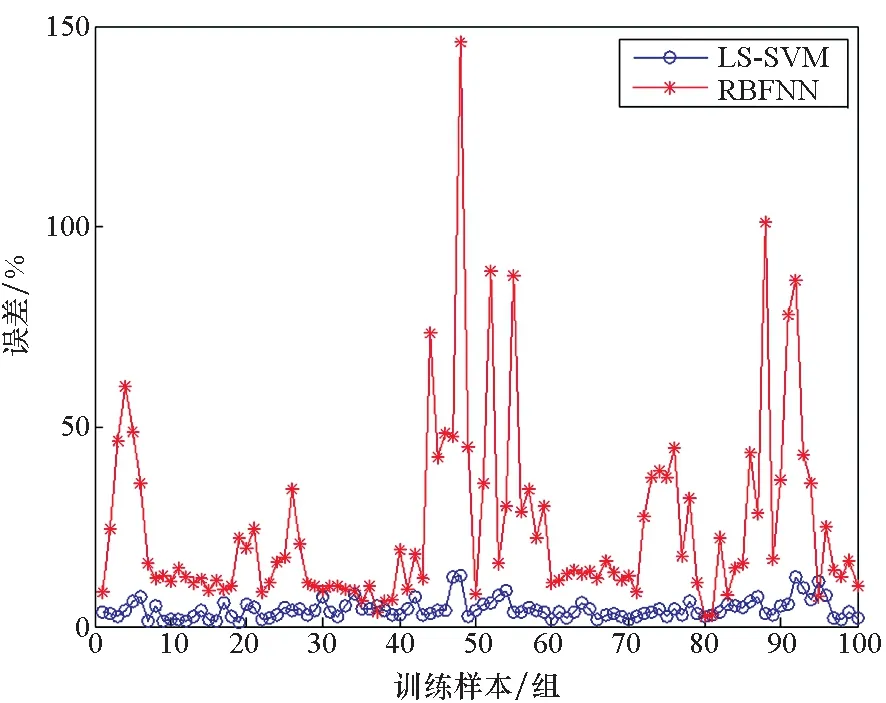
图4 实验分析下LS-SVM与RBFNN推算误差比较Fig.4 Extrapolation error comparison of LS-SVM and RBFNN of experimental analysis
在艇模实验中,最小二乘支持向量机的推算精度同样明显优于径向基神经网络算法,其误差一般在 6%以下,最大误差为12.76%。
3.3 误差分析
仿真和实验结果都证明了基于LS-SVM的内外映射法能够准确得到潜艇外部固定磁场的变化量。其中实验结果产生误差的原因主要有以下两个方面:
1)实验过程中,磁传感器受外界环境干扰而发生变化;
2)传感器存在测量误差以及算法本身的计算误差。
4 结论
本文采用基于LS-SVM的内外磁场映射方法来推算潜艇外部垂向固定磁场,仿真和实验结果吻合较好,在误差范围内能够满足技术要求。与RBFNN算法相比,LS-SVM有着更好的泛化能力和推算精度,且不需要大量的样本用于训练模型,符合舰艇消磁勤务工作实际,具有较强的实用性。下一步研究考虑在该方法的基础上,对内部磁传感器的安装位置及数目进行优化,不断提高推算精度。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
航天器工程(2019年3期)2019-07-31
军事文摘(2019年13期)2019-07-12
造船技术(2016年6期)2017-01-13
中国测试(2016年3期)2016-10-17
上海航天(2014年1期)2014-12-31
遵义师范学院学报(2010年3期)2010-09-01