
接触轨全自动巡检装置设计及应用
2020-12-07 08:47谈灏许可谢鹏程米继光
现代城市轨道交通 2020年11期
谈灏 许可 谢鹏程 米继光


摘 要:针对目前国内接触轨巡检工作的现状,文章介绍一种接触轨全自动巡检装置。其利用三维激光对接触轨受流面进行扫描并测量出接触轨的几何参数,同时该装置应用激光雷达技术实现自动行进功能,可高效准确地完成接触轨线路的巡检工作。
关键词:地铁;接触轨;全自动巡检;激光;设计;应用
中图分类号:U231
接触轨作为地铁列车受流方式之一,为列车提供了持续、稳定、可靠的电能。随着高密度地铁列车的运营,接触轨状态参数也会发生一定的变化,为检查接触轨的状态,目前通常采用的巡检方式有人工测量、推行式接触轨检测小车、接触网轨道车、地铁综合检测车等。但这些传统接触轨巡检方式具有一定的局限性,如劳动强度大、需要專门的天窗时间、检测灵活性差、效率不高等。为此,本文基于工业相机三维测量、高速高清成像和激光雷达扫描等技术设计了一种接触轨全自动巡检装置。
1 接触轨全自动巡检装置概述
1.1 工作原理
接触轨全自动巡检装置的工作原理是:装置在自主行进过程中拍摄受流面、膨胀接头、防护罩搭接处等位置图片,经专用软件进行图片分析、三维还原、特征识别、数据处理获得所需的接触轨参数值,并对上述区域的部件异常状态实现智能判断,进而快速指导运维人员对接触轨线路进行状态检修。
1.2 结构及功能
接触轨全自动巡检装置系统结构分硬件和软件两部分,硬件部分包括巡视模块、检测模块和自主行进模块,软件部分包括数据处理软件模块。其中,巡视模块用于拍摄接触轨线路的高清图像,供后期分析接触轨的技术状态;检测模块负责测量接触轨的几何参数;自主行进模块负责控制装置自主进行测量,并实现自动避障和自动跟随人员等功能;数据处理软件模块用于存储和分析管理该装置获取的图像和测量数据,并实现数据报表和风险报告的输出;具体如图1所示。
2 方案设计
2.1 巡视模块设计
巡视模块主要由图像采集模块和光线补偿模块构成。其中图像采集模块用于对接触轨受流面、定位点、膨胀接头和防护罩等部件进行高清成像,同时能够适应强烈的光线变化,如夜间在隧道内和白天在车辆段的作业场景。在线路巡视过程中,需要拍摄的视野宽度不应低于整个接触轨防护罩的宽度,本文采用宽度为159mm的防护罩,同时由于青岛地铁采用下部受流的接触轨安装方式,留给相机的安装距离有限,该巡检装置设计的镜头到接触轨面的最小物距D不大于140mm。为保证相机拍摄范围能够对接触轨实现全覆盖,需要通过下列公式对相机视野进行计算。
式(1)~式(3)中,FOV为相机的视野范围;FOVW为横向视野分量;FOVH为纵向视野分量;FL为镜头焦距,mm;w为选用相机的传感器横向尺寸,mm;h 为选用相机的传感器纵向尺寸,mm。
若所选相机的镜头焦距为6 mm,相机传感器的横向尺寸为7.18 mm,纵向尺寸为5.32 mm,则通过上述公式可以计算出横向视野和纵向视野为:
计算得到的横向视野范围为167 mm,大于接触轨防护罩的159mm。选用相机的分辨率为1600像素×1200像素,可以得出每一像素所代表的实际物理尺寸为:167/1 600≈0.1mm,124/1200≈0.1 mm。因此对于接触轨出现的形变和损伤,都能清晰成像。同时该巡检装置设计的巡检速度为3km/h,即每秒前进约为833mm。若按照相机拍摄帧率FPS为15帧/s计算,则相机每秒拍摄的最大接触轨距离之和Smax根据下式计算:
即167×15 = 2505mm,大于设计速度833mm/s 的要求。
根据上述计算,可以得出该装置采用的工业相机满足巡视中视野、清晰度以及速度的要求。该巡检装置选用尺寸为50 mm×20 mm的LED光线补偿模块,可为工业相机在暗光环境下提供稳定的照明光源,从而满足相机拍摄曝光时间短和成像质量要求高的特点。图2分别展示了传统工业相机在接触轨定位点、膨胀接头和防护罩搭接位置拍摄的照片。
2.2 检测模块设计
2.2.1 参数测量原理
如图3建立的坐标系,所检测的点是以数对形式(X,Y)表示坐标系中的点,则该点在坐标系内的X坐标值为拉出值,Y坐标值为导高值。
导高值的测量模型为:
式(5)中,Y为导高值(接触轨轨面中心点至钢轨轨面的垂直距离);Y1为三维扫描相机测得接触轨轨面距离相机基准面的高度;Y2为三维扫描相机基准面距离钢轨轨面的高度。
拉出值的测量模型为:
式(6)中,X为拉出值(接触轨轨面中心点至钢轨轨面的水平距离);X1为三维扫描相机测得接触轨轨面距离相机基准面的水平距离(为保证扫描相机能在接触轨轨面中心点的正下方,故X1设计值取0);X2为三维扫描相机基准面距离钢轨轨面的水平距离。
结合标准的接触轨受流面的外形尺寸,可以精确地计算出磨损面积以及硬点的尺寸大小。受流面磨损和硬点的测量数学模型为:
式(7)中,M为受流面磨损程度;C为三维扫描相机深度测量修正常数(视域深度和像素的比值);M1为三维扫描相机测得接触轨受流面的磨损量。
基于三维扫描相机的测量频率F、移动时间s、移动速度V和测量次数N即可获得膨胀接头间隙值和防护罩搭接量Z的测量数学模型,即
基于三维扫描相机测得的接触轨轨面与其夹角 W1,加上测量基准面(钢轨平面)修正常数C,即可获得接触轨受流面和钢轨平行度W的测量数学模型,即
2.2.2 模块设计
三维检测技术主要利用工业相机、光学镜头和激光发射器组合构建成三维扫描相机。其通过激光束照射被测物体表面形成高亮度图像,经过三角测量法测量出物体的3D形状,可用于生成物体的3D图像、尺寸检测、体积测量或识别外形缺陷。该巡检装置选用了分辨率为2 560像素×832像素的工业相机和12mm 的光学镜头。测量原理如图4所示,在工业相机距离接触轨受流面160 mm位置的情况下,可以计算出宽度视野范围最小为265 mm和测量分辨率为0.103mm,从而可计算出接触轨的拉出值。在对接触轨导高值的测量中,先使用激光束从垂直方向照射受流面,而工业相机从与激光束夹角α为35°的方向拍摄受流面,然后相机分析由传感器获取的图像并定位图像中的激光束。沿着受流面宽度点位的激光束位置越高,受流面该点位的实际位置就越高,通过计算可得到高度视野范围最小为105 mm,并获得高度的最小分辨率为0.11 mm。
在测量过程中,该巡检装置中的里程传感器每间隔0.3 mm会触发一次检测模块中的工业相机进行拍摄和数据分析,从而完成对整条线路接触轨及其周围零部件的精确扫描测量。
2.3 自主行进模块设计
该巡检装置的自主行进模块主要由无刷电机、锂电池组和激光雷达3部分构成,如图5所示。无刷电机的减速比为1:10,与之配套的轮子直径为94 mm,经过计算可以实现最高运行速度5 km/h。模块的锂电池组采用24 V(15 Ah)的动力锂电池,可实现4 h连续工作,续航里程可达到20 km,可保证在一个作业天窗点时间内持续工作。
自主行进模块的核心是通过激光雷达实现巡检装置的自主避障和人员跟随2个功能。自主避障功能是需要实现该巡检装置对前方指定距离范围内的障碍物做出避障处理,能够及时停止行驶,直到障碍物移除后自主恢复行进。人员跟随功能是需要实时判断后方巡检人员的距离,如果跟随的巡检人员距离超过预先设置的距离,巡检装置应自动停止行进,进行等待,当巡检人员进入设备设置的距离内,其自动恢复向前行进。根据这两点要求,该巡检装置采用激光雷达作为关键传感器。激光雷达通过360°发射激光并检测返回光的强度,可以得到一个以巡检装置为中心的点云集合,每个点均包含空间坐标信息(x,y,z)以及光强度信息(i),将轨道两侧外的点集合删除后可以得到轨道前后的所有点集合;通过判断设置区域内是否有点集合的存在,则可以实现对前方障碍物和后方跟随人员的判断功能。
2.4 数据处理软件模块设计
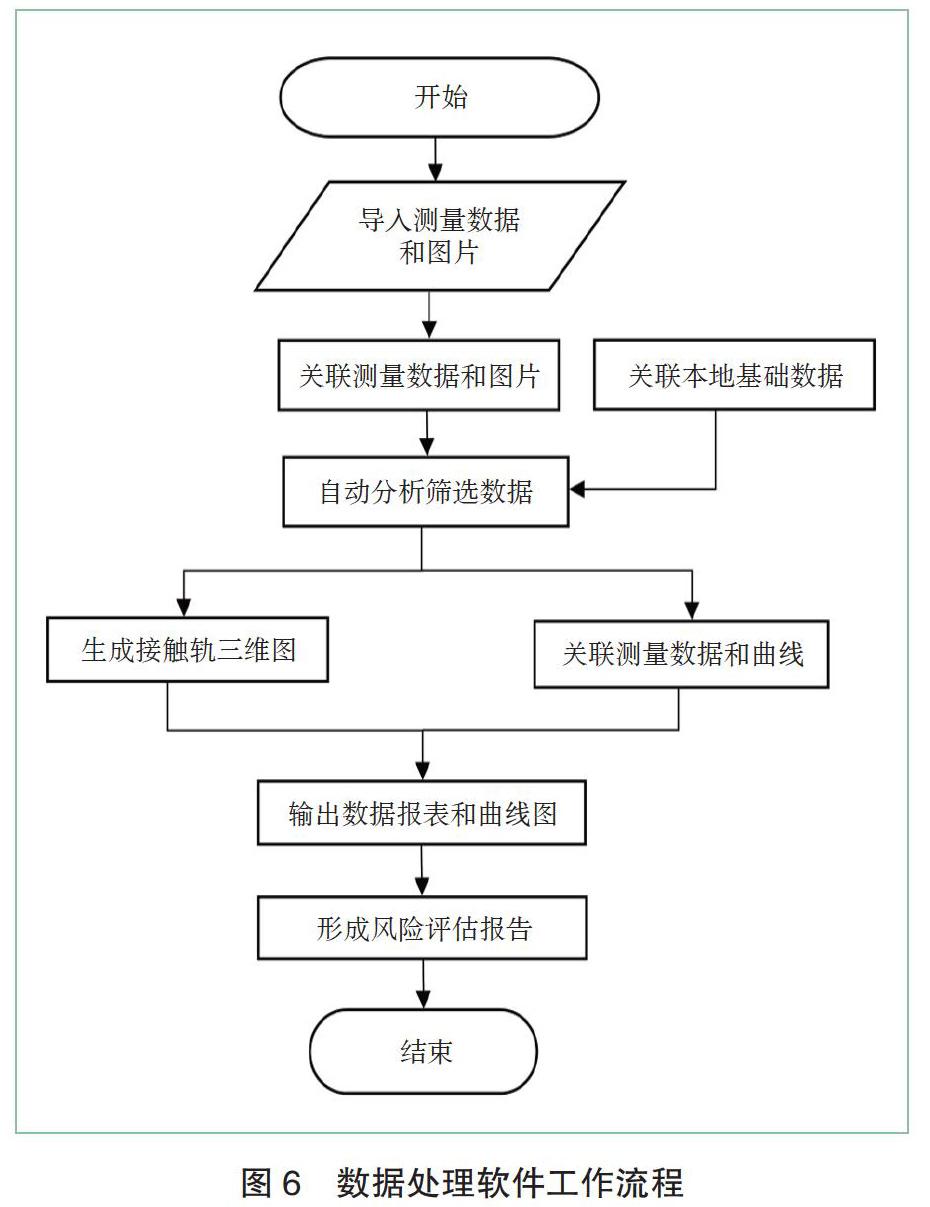
在测量数据通过USB接口导入数据处理软件后,系统将导入的测量数据和巡检现场图片信息与本地已有的基础数据库进行关联,然后自动对导入的测量数据进行分析和筛选,并自动识别定位点、膨胀接头、电连接和端部弯头等重要部件。同时,数据处理软件根据测量算法计算出的数值对整个测量过程中的超限数据进行分析,并形成超限数据库;数据处理软件根据测量的数据生成和显示接触轨的三维信息图像,并将计算出的接触轨每一个测量点的几何参数形成数据列表和数据曲线图进行显示。對于超限的数据,数据处理软件将以Excel报表的形式输出给用户,并生成测量曲线图;同时根据输出的数据报表和实际的线路情况形成本次测量的风险评估报告,指导运维人员对其进行检修作业。数据处理软件工作流程如图6所示。
3 接触轨全自动巡检装置实证
以青岛地铁下部受流接触轨为例,其主要安装参数如表1所示。
根据青岛地铁接触轨的运维要求,设计接触轨全自动巡检装置的主要技术参数如表2所示。
接触轨全自动巡检装置实物如图7所示。该巡检装置自青岛地铁3号线投入使用以来,经过36个天窗点的试用,总共巡检线路382 km,巡检作业时获得的导高值、拉出值、接触轨平行度、接触轨磨耗值和硬点值等参数的测量范围和测量精度均达到设计要求,具体数据输出(以双山路—长沙路段为例)如表3所示。
4 结束语
目前我国已经有北京、天津、青岛、广州、武汉等城市的部分或全部地铁线路采用了接触轨供电方式,而且所用城市和线路数量都在不断增加,而接触轨巡检方式的优化和技术的提高是保障地铁运营的重要一环。本文介绍的接触轨全自动巡检装置的工作效率比传统巡检作业有大幅的提高,可有效提高线路故障检出率,缩短巡检时间,减少巡检人员数量,降低作业强度。该巡检装置将是地铁智慧运维的重要基础装备,为地铁的运营安全提供可靠技术支撑和保障。
参考文献
[1]于万聚.高速电气化铁路接触网[M].四川成都:西南交通大学出版社,2003.
[2]方鸣.城市轨道交通的供电制式及馈电方式[J].中国铁路,2003(4):49-53.
[3]方彦,李厚春.城市轨道交通供电方式的分析和比较[J].铁道机车车辆,2004,24(4):69-70.
[4]尹洪权,薛海峰,张煜超,等. 城市轨道交通第三轨供电系统集电靴的力学性能试验研究[J].城市轨道交通研究,2016,19(2):101-103,124.
[5]赵延峰,孙淑杰,甄宇峰. 城市轨道交通综合检测系统[J].铁路技术创新,2015(4):83-88.
[6]许玉德,周宇. 既有线轨道质量指数的分布与不平顺权重系数统计分析[J].中国铁道科学,2006,27(4):71-75.
[7]周正,赵国堂. 轨道质量指数计算问题的探讨[J].中国铁道科学,2003,24(3):64-68.
[8]邢彤,罗万鹏,孙健翔.城市轨道交通第三轨供电受流系统及磨耗试验台设计[J].铁道技术监督,2017,45(5):21-24.
[9]中华人民共和国铁道部.铁运[2012] 136号 关于发布《高速铁路供电安全检测监测系统(6C系统)总体技术规范》的通知[G]. 2012.
[10] 占栋,陈唐龙. 基于线阵相机的接触轨几何参数动态检测系统[J].现代城市轨道交通,2012(1):41-43.
[11] 李芳芳. 一种新型轨道检测技术的基础理论探讨[D].四川成都:西南交通大学,2010.
[12] 吴积钦. 电气化铁道接触线拉出值检测装置[J].铁道学报,1996,18(2):78-81.
[13] 周威,盛良,孙刚,等. 地铁刚性接触网检测技术[J].现代城市轨道交通,2019(8):70-75.
[14] 许可. 高速铁路便携式接触网巡检系统的实现与应用[D].四川成都:西南交通大学,2014.
[15] 万紫阳. 智能机器人在电力电缆隧道巡检的研究与应用[J].中国新技术新产品,2014(18):14-15.
[16] 郑伟. 全自动无人驾驶模式下系统功能与场景分析[J].城市轨道交通研究,2017,20(11):107-109,136.
[17] 廖书红,武静,张海军,等. 双目数字图像实时预畸变校正技术研究[J].电光与控制,2018(5):109-114.
[18] 王昊.高速轨道检测图像处理技术[J].铁路技术创新,2012(1):35-37.
[19] 周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011(19):85-88,96.
[20] 魏鹏,张志强,张春熹,等.无人值守变电站巡检机器人导航系统研究[J].自动化与仪表,2009,24(12):5-8,25.
[21] 范其明,钱逸秋,张兴会.基于视觉传感器的地铁接触轨状态检测系统设计[C]//第十届全国信号和智能信息处理与应用学术会议论文集.湖北襄阳,2016:414-416.
[22] 周亚敏.地铁接触轨几何参数检测装置研究[J].企业技术开发,2019(3):10-16.
[23] 刘艳丰.第三轨受流系统动态特性测试系统研究[D].北京:北京交通大学,2018.
[24] 唐崇伟,陈唐龙.基于面阵相机的接触轨几何参数检测系统[J].电气化铁道,2012(3):42-44.
[25] 王合新,黄英杰,袁健,等.轨道检查车接触轨检测方法[J].铁道标准设计,2009(2):22-24.
收稿日期 2020-05-22
责任编辑 党选丽
猜你喜欢
锦州医科大学报(2022年2期)2022-05-07
时代英语·高二(2021年4期)2021-07-29
时代英语·高二(2021年4期)2021-07-29
青少年科技博览(中学版)(2021年11期)2021-03-07
故事大王(2019年4期)2019-05-14
Coco薇(2017年10期)2017-10-12
中学生数理化·高一版(2016年6期)2016-05-14
小火炬·阅读作文(2014年6期)2015-04-07
集装箱化(2014年5期)2014-06-23
中国信息化·学术版(2013年5期)2013-10-09
