
船用锅炉汽包水位内模滑模控制
2020-12-09 01:48段蒙蒙甘辉兵
中国航海 2020年3期
段蒙蒙,甘辉兵
(大连海事大学 轮机工程学院, 辽宁 大连 116026)
大型油船的燃油辅锅炉是产生高温高压蒸汽的装置,具有蒸发量大和蒸汽压力高等特点,可为船用设备提供热能和动力。[1]锅炉汽包水位是锅炉装置中的一个重要运行参数,对其进行控制是保证锅炉安全运行的必要条件。对于非线性时滞、强耦合和非自平衡的锅炉汽包水位系统来说,传统的比例-积分-微分(Proportional Integral Differential,PID)控制由于参数固定,对系统的所有工况不能表现出良好的控制性能。Smith预估控制虽然能补偿系统延时的影响,但对建模误差比较敏感,而内模控制作为Smith预估控制的延伸,对系统建模误差具有一定的鲁棒性,但当模型误差较大时,系统有可能不稳定,甚至发散。滑模控制作为一种鲁棒控制,对系统的不确定性和外界干扰具有强鲁棒性,文献[2]和文献[3]采用预测控制原理,将滑模控制与预测控制相结合,得到多模型滑模预测控制策略,取得了良好的控制效果,但计算量较大。文献[4]和文献[5]将内模控制结构与滑模控制律相结合对一阶时滞系统进行控制,内模控制结构补偿了时滞对系统的影响,积分滑模面设计的滑模控制律提高了系统的控制精度和鲁棒性,仿真结果达到了预期的控制效果。但传统的积分滑模控制(Integral Sliding Mode Control, ISMC)不具有全程鲁棒性,且在系统初始误差较大时,尤其是在执行器饱和的情况下,积分作用会恶化系统的暂态性能,对于具有内模控制结构的不稳定系统在阶跃扰动后,也会产生稳态误差,甚至使系统发散。
针对汽包水位的非自平衡和非线性时滞特性,将内模控制结构与滑模控制律相结合,提出基于全程非线性积分滑模面与扰动补偿的内模滑模控制策略,不仅能消除滑动模态的趋近阶段,使系统具有全程鲁棒性,而且能很好地抑制扰动和消除稳态误差。
1 锅炉汽包水位内模控制方案
目前的锅炉汽包水位主要采用三冲量串级PID控制,虽然其结构简单、参数易整定,但其只适用于定工况,而内模控制是基于被控对象模型的新型控制器,具有设计简单、跟踪性能好和鲁棒性强等优点。[6]在锅炉汽包水位内模控制中,将内环PID控制与锅炉水位系统的传递函数组合形成汽包水位的广义被控对象。锅炉汽包水位的内模控制结构见图1。
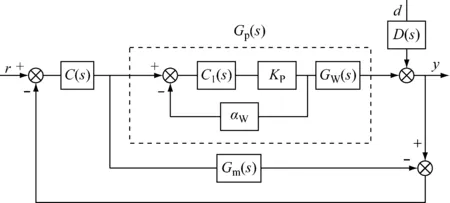
图1 锅炉汽包水位的内模控制结构
图1中:C1为内环PID控制;KP为调节阀;αW为给水流量反馈装置;GW为锅炉水位系统传递函数;Gp为广义被控制对象;Gm为被控对象的过程数学模型;D为扰动通道的传递函数;C为内模控制器。由图1可得系统的输入输出关系为
(1)
当模型匹配,即Gm(s)=Gp(s),可将式(1)简化为
y(s)=C(s)Gp(s)r(s)+
(1-C(s)Gm(s))D(s)ds
(2)


(3)
由式(3)可知:内模控制可克服系统外界扰动,并能很好地跟踪输入信号。内模控制器的设计为
1) 将过程模型分解为最小相位部分和非最小相位部分,即
Gm(s)=Gm+(s)Gm-(s)
(4)
2) 对最小相位系统求逆,并与适当阶次的滤波器联立构造内模控制器,即
(5)
Ⅰ型、Ⅱ型滤波器的典型形式分别为
(6)
(7)
式(6)和式(7)中:λ为滤波时间常数;n0为滤波器的阶次,使控制器物理可实现。
2 基于全程非线性积分滑模面与扰动补偿的锅炉汽包水位内模滑模控制
2.1 锅炉汽包水位内模滑模控制结构设计
汽包水位内模滑模控制器结构见图2。本文采用Smith预估结构补偿时滞对系统造成的影响,控制器采用滑模控制律增强系统在不同工况下的鲁棒性。控制方案包括2个控制器:Q为基于滑模控制律的主控制器;Gd为基于扰动补偿的扰动抑制控制器。em为模型误差,ym-为模型的预测输出。

图2 汽包水位内模滑模控制结构
在锅炉汽包水位的控制系统中,若把内回路近似看作比例环节,则锅炉水位系统的广义传递函数为
(8)
则
(9)
Gm+=e-τs
(10)
假设系统的设定值为r,则跟踪误差为e=r-y=r-ym--em。在滑模控制中,传统的积分滑模面为
(11)
式(11)中:n为系统的阶次。由于积分作用会恶化系统的暂态性能,而滑模控制的优点在于系统状态处于滑动模态时才具有鲁棒性。因此,考虑设计全程非线性积分滑模面改善系统的暂态性能,消除滑模控制系统的到达阶段,使其在初始时刻就处在滑模面上。设计锅炉汽包水位控制系统的全程非线性积分滑模面为
(12)
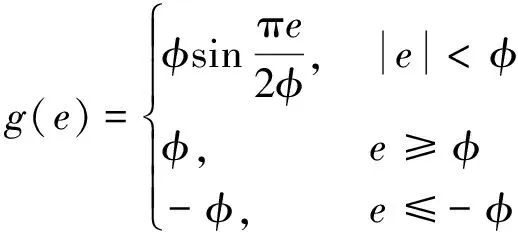
为分析非线性饱和函数g(e)[7]的特性,引入势能函数为
(13)
对式(13)进行求导,可得
(14)
非线性函数G(e)与g(e)的曲线图见图3。

图3 非线性函数G(e)和g(e)的曲线图
由图3可知:设计的非线性函数g(e)具有“小误差放大,大误差饱和”的特点,通过选择不同的参数φ获得期望的误差状态。

(15)
考虑到理想情况下em=0,由式(15)可得
λ2g(e)+f(0)ke-kt
(16)
由式(9)可得
(17)
联立式(16)与式(17),求解得到
(18)
(19)
为减少滑模控制中的抖动,设计自适应积分切换控制律[9]为
ud=Kw(|ρ|+η)sgn(s)
(20)

(21)
符号函数sgn(s)可由饱和函数sat(s)代替,有
(22)
式(20)~式(22)中:Kw>0;Kf<0。在滑动模态时,若s及其积分值趋近于零,则切换增益也趋近于零,从而消除抖振。当系统离滑动模态较远时,由于积分的累积作用导致切换增益较大,会增加系统的抖振。因此:引入负权值Kf,可有效避免切换增益不断增大,减小抖振;η为很小的一个正数,能使系统在接近滑模面时具有一定的收敛速度。滑模控制器中总的控制量为u=uc+ud。为分析系统的稳定性,选择的Lyapunov方程为
(23)
s(λ2g(e)+f(0)ke-kt)
(24)
将式(17)、式(19)和式(20)代入式(24)得
(25)
式(25)显然满足滑模到达条件,系统能进入滑动模态。
2.2 扰动抑制控制器设计
扰动控制器Gd的主要控制目标是镇定不稳定的被控对象并提高外界干扰的抑制能力。本文采用直接合成法对Gd进行设计。当系统模型匹配(即广义被控对象)Gp=Gm时,系统的扰动与输出之间的关系可根据图2表示为
(26)
从式(26)中可观察到包含时滞的特征方程,因此基于不稳定二阶系统加上时间延时对扰动控制器进行设计。控制器的结构考虑具有滞后超前补偿的PID控制器[10]为
(27)
式(26)中包含Gd的特征方程为
1+GdGm-e-τs=0
(28)
系统的时间延迟采用一阶Pade近似,将式(27)和式(9)代入式(28)得
(29)
将式(29)中α的值设定为0.5τ,式(29)分解简化为
d4s4+d3s3+d2s2+d1s+1=0
(30)
由式(29)和式(30)得
(31)
根据直接合成法,式(30)理想的方程式为
(λs+1)4=0
(32)
将式(32)与式(30)和式(31)相比较,可解得kp、ki、kd、α、β的值分别为
(33)
(34)
(35)
α=0.5τ
(36)
(37)
式(33)~式(37)中:λ为系统的性能调节参数,λ越小,其标称性能越好,λ越大,其鲁棒性能越好。为使扰动控制器不影响系统整体的鲁棒性,其值应取相对较大。
3 仿真试验结果分析
依据图2建立锅炉汽包水位的MATLAB/Simulink仿真模型,采用设计的内模滑模控制策略进行仿真验证。在锅炉汽包水位系统中,αW=0.084,Kp=20,锅炉水位系统传递函数为
(38)
系统的广义被控对象和扰动通道的传递函数分别为
(39)
(40)
在滑模控制律中取λ1=0.15,λ2=0.005,k=0.300,Kw=301.5,Kf=-1,Δ=0.2,φ=0.01;扰动抑制控制器中取λ=18,则α=2.5,β=4.523 6,η=0.01,kp=0.312 8,ki=3.858 9×10-4,kd=5.851 0。在锅炉汽包水位控制中,对基于内模控制结构的传统积分滑模控制律(Internal Model Control Structure with Integral Sliding Mode Control Law, IM-ISMC)与全程非线性积分滑模控制律(Internal Model Control Structure with Global Non-Linear Integral Sliding Mode Control Law,IM-GNISMC)进行仿真,设计工况和+20%参数变化且模型匹配时系统输出和控制器输出的曲线分别见图4~图7,2种控制方法的控制效果对比见表1。
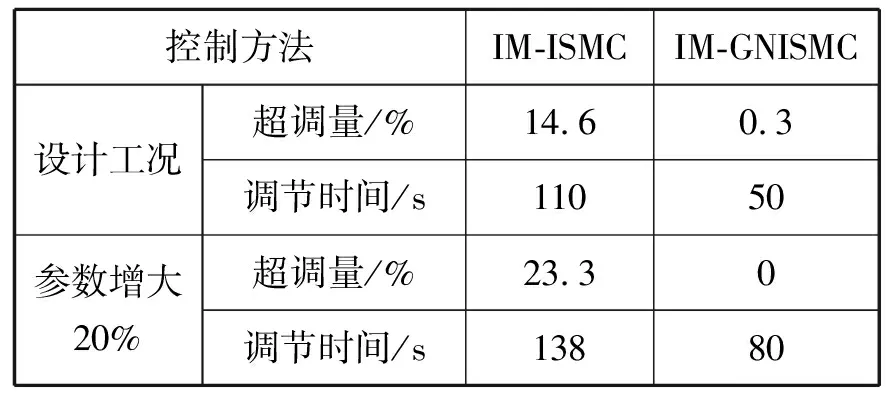
表1 IM-ISMC与IM-GNISMC控制效果对比
由表1和图4~图7可知:在设计工况下,由于初始误差较大,积分作用增强,使得IM-ISMC控制器输出较大,系统超调量为14.6%,过渡时间为110 s;IM-GNISMC控制器输出平稳,系统输出基本无超调,系统调节时间为50 s。当系统参数变化+20%且模型匹配时,IM-ISMC控制器使系统超调增大23.3%,过渡时间延长至138 s,这是由于初始阶段系统状态不处在滑模面上,在趋近阶段不具有鲁棒性,控制器输出跳变严重,无法实际应用;IM-GNISMC控制器输出平顺,系统调节时间为80 s,参数摄动对系统的性能几乎没有影响,控制系统具有全程鲁棒性和良好的跟踪性能。
对提出的内模滑模控制方案与锅炉汽包水位三冲量串级PID控制和内模控制进行仿真试验,以说明其具有良好的控制性能。
模型匹配时系统有无扰动控制器的响应曲线见图8。由图8可知:当系统存在干扰时,无扰动控制器的内模滑模控制方案使系统存在稳态误差,而有扰动控制器的内模滑模控制方案抑制干扰,消除稳态误差。

图8 模型匹配时有无扰动控制器的系统响应
在锅炉汽包水位控制系统中,上述3种控制方法分别在设计工况、时间常数T增大20%和增益K减小20%的情况下,系统的控制效果对比见表2。
当模型匹配时不同控制器的系统响应曲线见图9。由图9可知:在系统初始响应时,PID控制的响应慢,且超调量为46%,稳定时间为400 s;内模控制与提出的内模滑模控制的响应速度都很快,但内模控制稳定时间稍长,由于内模控制器采用Ⅱ型滤波器。因此,系统有39%的超调量,而本文提出的内模滑模控制器仅有0.3%的超调,且系统调节时间最短为50 s。在扰动抑制方面,在600 s将阶跃扰动施加给系统蒸汽流量。PID控制的扰动抑制性能最差,系统超调最大,稳定时间长,而内模控制由于只有1台控制器,系统需在跟踪响应和扰动抑制之间折中。在设计的内模滑模控制方案中,由于控制策略中特有的内模结构和扰动控制器的存在,使得由蒸汽扰动引起的系统不平衡态在主控制器动作前,扰动抑制控制器会优先施加一个水位调节分量,使系统在虚假水位或船舶晃动时具有较强的干扰抑制能力之后,在主控制器的作用下系统快速达到稳定。
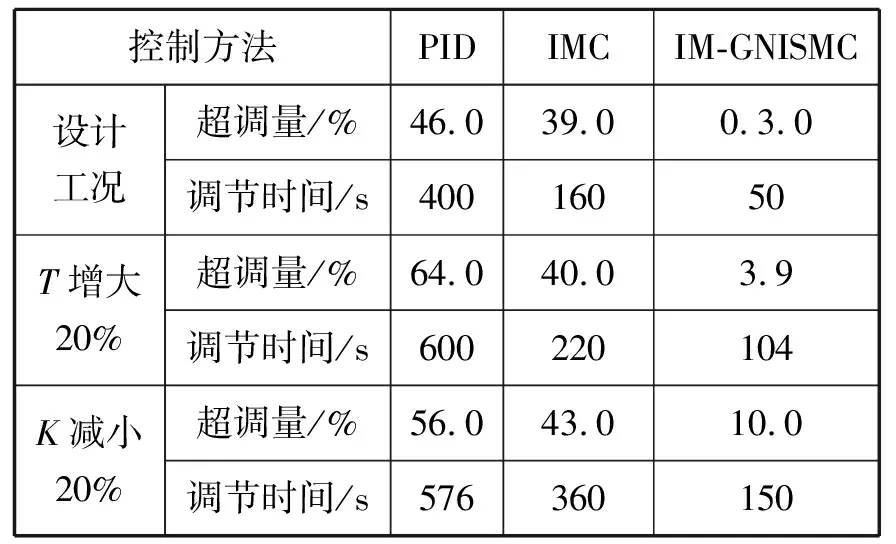
表2 不同控制器作用下汽包水位控制效果对比

图9 模型匹配时的3种控制器系统响应
在模型不匹配的情况下,即系统T和K分别增大和减小20%时系统的响应曲线分别见图10和图11。在系统初始响应时刻,PID控制与内模控制的超调量更大,稳定时间更长。由表2可知:IM-GNISMC控制器在参数摄动的情况下,系统的超调量和调节时间都十分小。系统的少许超调是由于模型失配导致的,若能准确在线辨识系统被控对象的模型,本文提出的内模滑模控制方案将表现出更好的控制性能。综上所述,IM-GNISMC控制器在各工况下都有良好的系统跟踪性能和抗干扰能力,并具有很强的鲁棒性。
4 结束语
为进一步提高传统锅炉汽包水位控制系统的性能,提出基于全程非线性积分滑模面与扰动补偿的内模滑模控制策略,仿真结果表明:本文提出的控制方案不仅可消除时滞对系统的影响,还可提高系统的响应速度,减小系统的超调,增强系统的鲁棒性。虽然设计的锅炉汽包水位的控制方案能取得预期效果,但由于控制模型中的参数较多,有必要进一步对控制器的参数设计进行研究。
猜你喜欢
西安交通大学学报(2022年7期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
商品与质量(2021年17期)2021-04-23
科技研究·理论版(2021年22期)2021-04-18
水下无人系统学报(2021年1期)2021-03-10
中国电气工程学报(2020年20期)2020-01-08
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科技视界(2016年16期)2016-06-29
