
结合Harris和改进K-means的遥感图像配准算法
2020-12-09 05:43祁曦
数字技术与应用 2020年10期
关键词:means算法


摘要:针对高分辨率遥感图像中,特征点数目大且易存在误匹配点的问题,提出结合Harris和改进K-means的遥感图像配准算法。首先,利用Harris提取特征点;然后,使用改进K-means算法进行区域划分,进行特征点匹配;最后,区域间利用RANSAC方法剔除错误匹配点,得到精确匹配点对。该算法减少了特征点数目,提高配准精确度。实验结果表明了算法的有效性。
关键词:Harris;图像配准;K-means算法;随机抽样一致(RANSAC)
中图分类号:TP751 文献标识码:A 文章编号:1007-9416(2020)10-0000-00
现今,随着社会需求不断增加,人们已经不再满足从单一图像中获取信息,多幅图像的叠加融合将能呈现更加全面、丰富的信息[1]。尤其是城镇分析、农林业监测、防灾赈灾等领域中,遥感影像的融合已成为数据分析不可或缺的一步,遥感图像配准技术也应运而生。针对同一场景,卫星通过不同类型的传感器,或在不同时间段内,对其从不同角度进行拍摄,形成遥感影像[2]。遥感图像配准的一般处理步骤是,首先找到图像发生几何畸变的原因,然后对两幅或多幅不同类型的遥感图像进行空间几何变换,而后进行匹配或叠加。
基于灰度和基于特征的配准方法是遥感图像配准的基本方法[3]。基于图像灰度的方法,实现简单,但运算量大,适合单一或灰度信息相似图像,对细节信息丰富的高分辨率遥感图像来说,易受噪声影响,处理效果不佳,效率低 [4]。而另一类只用到图像中的某些代表性点,称为特征点。Harris检测算法[5]、SUSAN算子[6]、SIFT方法[7]和SURF算法[8]等都是较为常见的点特征提取算子。Harris算子提取遥感图像中与周围像素有明显差异的特征点,特征点数量比SIFT少。何梦梦等人提出将Haar小波变换用于特征点提取的算法,降低了数据量,提高了不同类型图像的配准精度[9]。王威等人针对高分遥感数据中植被提取和配准的预处理问题,提出了改进Harris方法,提高配准效率[10]。葛毓欢添加全局约束用于配准,提高了配准效率[11]。杨艳丽等人提出,将Harris用于多尺度空间,提升遥感图像配准准确性[12]。
遥感图像的数据量不断增加,如何减少特征点数目和误配率成为本文所研究问题。本文利用Harris方法减少特征点数目,使用改进K-means方法进行匹配空间约束,减少误配率。下文将分几步进行介绍:(1)本文算法所使用术语介绍;(2)改进算法实施步骤;(3)实验结果对比分析;(4)结论及展望。
1 相关术语
1.1 Harris角点检测原理
Harris算法指的是提取遥感图像中与周围像素有明显差异的特征点,这些点可能是交叉点,也可能是灰度快速变化的点等。因此,角点检测提取的是关键信息点,数据量相对SIFT算法会降低很多,且特征点之间的相似度也会大大降低,有利于后续配准工作的进行[13]。
Harris是通过滑动窗口来寻找角点。其运算公式如下:
Harris中使用高斯函数作为窗口,进行检测,即;则表示的是该位置处窗口滑动前的像素值大小;为该位置处窗口滑动后的像素值大小。
1.2 改进K-means算法原理
K-means算法是一种经典的用来进行分类的方法。其基本思路为将样本数据分为K组,每组为一个区域,区域内的点尽可能接近,而区域间的点的距离尽可能地大。K个随机点作为中心点进行聚类,划分区域,每个区域重新求得新质心,依次循环进行,直至质心不再变化[14]。
上述求解过程中,开始中心点的选取较为随机,影响后期的聚类区域形成。因此,粒子群算法加入聚类中寻找最优初始聚类中心点。
PSO算法是利用全局最优信息、个人最优信息和个人经验信息,加权求得,重复迭代,直至找到最优解[15]。
PSO公式如下:
改进K-means算法的流程如下:
(1)初始化K值,劃分为K组,对每组初始位置和速度进行初始化操作;
(2)对i组区域,计算每个特征点的适应值、个体最优信息和全局最优信息,不断比较更新;
(3)求i区域中每个特征点的最优速度和下一步最佳位置,从(3)重新迭代,直至到达目的地,得到K个初始聚类中心;
(4)进行K-means聚类,得出区域划分。
2 高分辨率遥感图像配准改进算法
2.1 算法思路
遥感图像配准时,一般使用RANSAC算法对匹配点筛选,但会出现一定的错误匹配点对,且迭代次数多,工作量大[4]。因此,本文对匹配点添加一定的区域进行约束,使得对应区域的点进行进行匹配,并剔除误配点。
算法设计流程如下:
(1)对于基准遥感图像S和待配准遥感图像R,使用Harris算法提取关键特征点,计算特征点提取数目。由于高分辨率遥感图像数据量庞大,使用SIFT算法提取的特征点数量巨大,耗费时间大,且存在很多相似特征点,造成资源浪费。因此,使用Harris解决这一问题。
(2)将基准图像定义为S,待配准图像定义为R。S和R中使用改进K-means算法分别划分为K1片区域和K2片区域,不同区域标记颜色不同。对应区域内求取匹配点对。PSO与K-means相结合,使得遥感图像中特征点的聚类精度更高。
(3)剔除误匹配点对。改进K-means算法用于进行区域约束。如此,可限定在一定区域中使用RANSAC方法进行筛选,减少工作量和误配率。
算法流程图如图1所示。
2.2 算法评价标准
本文使用CMR和RMSE进行正确率和精准度评价。
评判标准为:CMR的值代表着正确匹配点率的高低,值越大正确匹配率越高。而RMSE计算的是S和R之间的标准误差。因此,RMSE的值代表着配准精度的高低,值越小精度越大。
3 配准实验结果及分析
3.1 实验数据和实验环境
本文的实验数据为三组遥感图像,第1组是博天一号拍摄的实时影像,拍摄时间为2016年,拍摄地点为某地的世纪大街。第2组是OVS-1A/B卫星拍摄的全色图像,拍摄时间为2017年,拍摄城市为美国达拉斯市区,图像大小为33962644。第3组是lUtraCam-D卫星拍摄的RGB图像,拍摄时间为2005年,拍摄城市为伊朗首都德黑兰,图像的大小都12561278。实验数据如图2所示。
本文实验所用环境为Windows10操作系统,计算机配置是Intel(R)Core(TM) i5-7200U 2.50GHz CPU,内存8GB,使用软件为Matlab2016a。
3.2 实验结果及分析
3.2.1 实验分析
从以下几方面入手进行对比实验。
(1)进行特征点提取的对比实验。通过分析Harris与SIFT在特征点数目、相似度的情况,得出实验结论。
(2)进行精确匹配点对获取的对比实验。使用第2组和第3组进行对比,分析本文方法和传统RANSAC算法在提取效率和正确匹配率的情况,得出最佳匹配算法。
(3)SIFT和改进算法进行配准精度对比实验。
3.2.2 实验对比结果
首先,针对第1组和2组的遥感数据,分析SIFT和Harris特征数目和分布情况,实验结果如图3所示。表1是特征点数目和运行时间。对比发现,Harris检测的特征点数目较少,运行时间短,且冗余特征點减少。
其次,对第2组和第3组遥感图像使用本文方法获取正确匹配点对,将其与传统RANSAC算法进行比较,以第3组为例,结果如图4所示。表2是精确匹配点数对比。结果发现,改进算法的正确匹配点率有所提升,误匹配点数减少了,但总匹配点数有所下降。
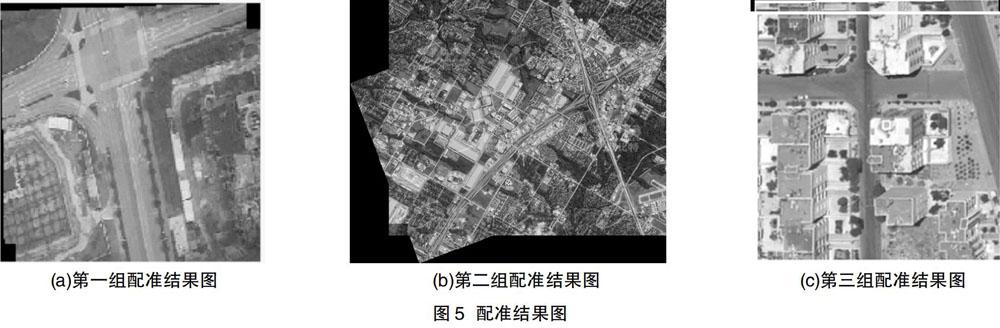
最后,针对第2组图像,比较两种方法的配准精确度和正确匹配率,如表3所示。本文算法的配准精度略高且正确匹配点率高,且时间缩短,效率有所提升。配准结果图如图5所示。
4 展望
本文提出Harris和改进K-means相结合的方法进行配准。Harris提取特征点后,划分区域求取匹配点对,而后剔除误配点。其中,改进K-means方法用于区域划分和约束。通过实验比较发现,CMR和运行效率提高了。但是,存在参与匹配点数减少的情况,在特征点提取上存在误差,漏掉了部分正确特征点,后续实验中应当加以改进。
参考文献
[1] 刘占强.高分辨率遥感图像配准技术的研究[D].北京:北京邮电大学,2019.
[2] Han Y, Choi J, Byun Y, Kim Y. Parameter optimization for the extraction of matching points between high-resolution multisensory images in urban areas. IEEE Trans. on Geoscience and Remote Sensing, 2014,52(9):5612-5621.
[3] Zitová B,Flusser J. Image registration methods:A survey. Image and Vision Computing,2003,21(11):977-1000.
[4] 何梦梦.基于边缘点特征的高分辨率遥感图像配准方法研究[D].北京:中国科学院大学,2017.
[5] Harris C, Stephens M. A combined corner and edge detector[C]// Proceedings of the 4th Alvey Conference. Manchester,UK:[s.n.],1998:147-152.
[6] Smith S M, Brady J M. SUSAN-A new approach to low level image processing. International Journal of Computer Vision,1997,23(1):45-78.
[7] Lowe D G. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004,60(2):91-110.
[8] Bay H, Tuytelaars T, Gool L V. SURF:Speeded up robust features[C]// sProceedings of the European Conference on Computer Vision,2006:404-417.
[9] 何梦梦,郭擎,李安,等.特征级高分辨率遥感图像快速自动配准[J].遥感学报,2018,22(2):277-292.
[10] 王威,杨芳,张鹏,等.基于ENVI/IDL的高分遥感数据自动预处理及植被提取方法:以湖南林业为例[J].湖南城市学院学报(自然科学版),2020,29(2):45-50.
[11] 葛毓歡.基于点特征和局部结构信息的遥感图像配准[D].西安:西安电子科技大学,2018.
[12] 杨艳丽,夏朝辉,张金生,等.结合多尺度角点和Harris变换的遥感图像配准方法[J].电光与控制, 2020,27(8):105-108.
[13] 许佳佳.结合Harris与SIFT算子的图像快速配准算法[J].中国光学,2015(4):574-581.
[14] 蒋丽,薛善良.优化初始聚类中心及确定K值的K-means聚类算法[J].计算机与数字工程,2018,46(1):21-24.
[15] Kennedy J, Eberhart R.Particle swarm optimization[C]//: Proceedings of IEEE International Conference on Neural Networks, 1995:1942-1948.
收稿日期:2020-09-09
作者简介:祁曦(1993—),女,山东德州人,硕士研究生,助教,研究方向:遥感图像配准。
Remote sensing Images Registration Algorithm Combining with Harris and Improved K-means
QI Xi
(College of Information Technology, Shanghai Jian Qiao University, Shanghai 200062)
Abstract:Aiming at the problems such as false matching points and large volume remote sensing image registration, a remote sensing image registration algorithm based on Harris and improved K-means is proposed. Firstly, the feature points were extracted with Harris. Secondly, feature point is matching after the improved K-means algorithm used for region division. Finally, RANSAC method is used to eliminate the wrong matching points among regions, and the precise feature points are obtained. The proposed algorithm can reduce the number of feature points, and it can increase the registration accuracy. The experimental results indicate that the proposed method is effective.
Key words:Harris; image registration; K-means algorithm; Random sampling consensus (RANSAC)
猜你喜欢
哈尔滨理工大学学报(2017年1期)2017-04-08
商业经济(2017年3期)2017-03-20
哈尔滨理工大学学报(2016年4期)2016-11-10
现代电子技术(2014年8期)2014-09-27
