基于双目立体视觉的平面测距研究
2020-12-14 04:35马朝阳华云松
软件导刊 2020年9期
马朝阳 华云松


摘 要: 在双目立体测量原理的基础上,结合Matlab和OpenCV,设计一个基于双目视觉的平面测距系统。该系统根据张正友标定方法,通过Matlab工具箱对双目相机进行标定,然后根据相机成像原理建立世界坐标与像素坐标之间的关系方程,在VS2015+Opencv3.3.0环境下通过最小二乘法解出目标点的三维空间坐标。最后能够实现通过鼠标选定同一平面内的两个目标点获取其空间坐标,然后计算出两点之间的距离。该系统结构简单,易于实现。实验结果显示,该系统测量精度高,且目标距离大于40 cm时精度会更高。
关键词: 双目视觉;测距;相机标定;最小二乘法
中图分类号: TP317.4 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.09.051
【Abstract】: Based on the principle of binocular stereo measurement, combined with Matlab and OpenCV, a planar distance measurement system based on binocular vision is designed. According to the calibration method of Zhang Zhengyou, the system calibrates the binocular camera through the Matlab toolbox, and then establishes the relationship equation between world coordinates and pixel coordinates according to the camera imaging principle, and solves the target by least square method in the environment of VS2015 + Opencv3.3.0 The three-dimensional space coordinates of the point. Finally, it is possible to select two target points in the same plane by the mouse to obtain their spatial coordinates, and then calculate the distance between the two points. The system has a simple structure and is easy to implement. Experimental results show that the system has high measurement accuracy, and the accuracy will be higher when the target distance is greater than 40 cm.
【Key words】: Binocular vision; Ranging; Camera calibration; Least square method
0 引言
機器视觉作为一种人工智能识别系统,广泛应 用于医学、工业、军事、农业等方向[1-3]。相较于单目视觉,双目视觉能够很容易的获取目标物的深度信息,便于三维信息的提取,所以双目视觉已经广泛应用于生活、生产等方面。
双目视觉测量技术能够在非接触的环境下获取目标之间的三维信息,并且可以达到很高的精度。因此双目测量技术能够在工业生产、农业采摘甚至航空航天领域大放异彩。
平面测距系统通过左右相机获取标定板不同角度的多幅图像,利用matlab工具箱实现双目标定,再根据成像原理构建像素坐标和世界坐标的转换关系,根据最小二乘法在VS2015+OpenCV3.3.0环境下计算出左右像素点对应的空间坐标。
1 相机标定
1.1 相机标定原理
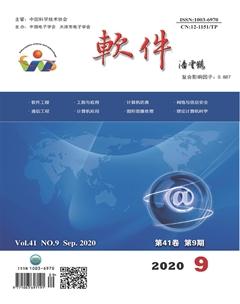
双目立体视觉测量被测物体的三维信息,会涉及到各个坐标系的转换[4],该系统需要用到的坐标系包括:世界坐标系、图像坐标系、像素坐标系和相 机坐标系[5-7]。
像素坐标系以像素为基本单位,像素坐标系上任意一点可以表示为。图像坐标系平行于像素坐标系,原点是摄像机光轴与成像平面的交点,图像坐标系的任意一点可以表示为。像素坐标与图像坐标之间的关系如下:
(1)
相机坐标系的原点与光心重合,坐标轴平行于图像坐标系的坐标轴,轴与相机的光轴重合。相机坐标系中的任意一点可以表示为。世界坐标系即绝对坐标系,用来描述真实场景中的位置,其任意一点描述为。相机坐标系与其他坐标系的关系如图1所示。
1.2 相机参数标定
相机标定利用Matlab的toolbox工具箱来获得内外参数。采集14对不同位置和交点的标定板图片,先进行单目标定,在进行双目标定,图片分辨率为800*800。标定过程如下:
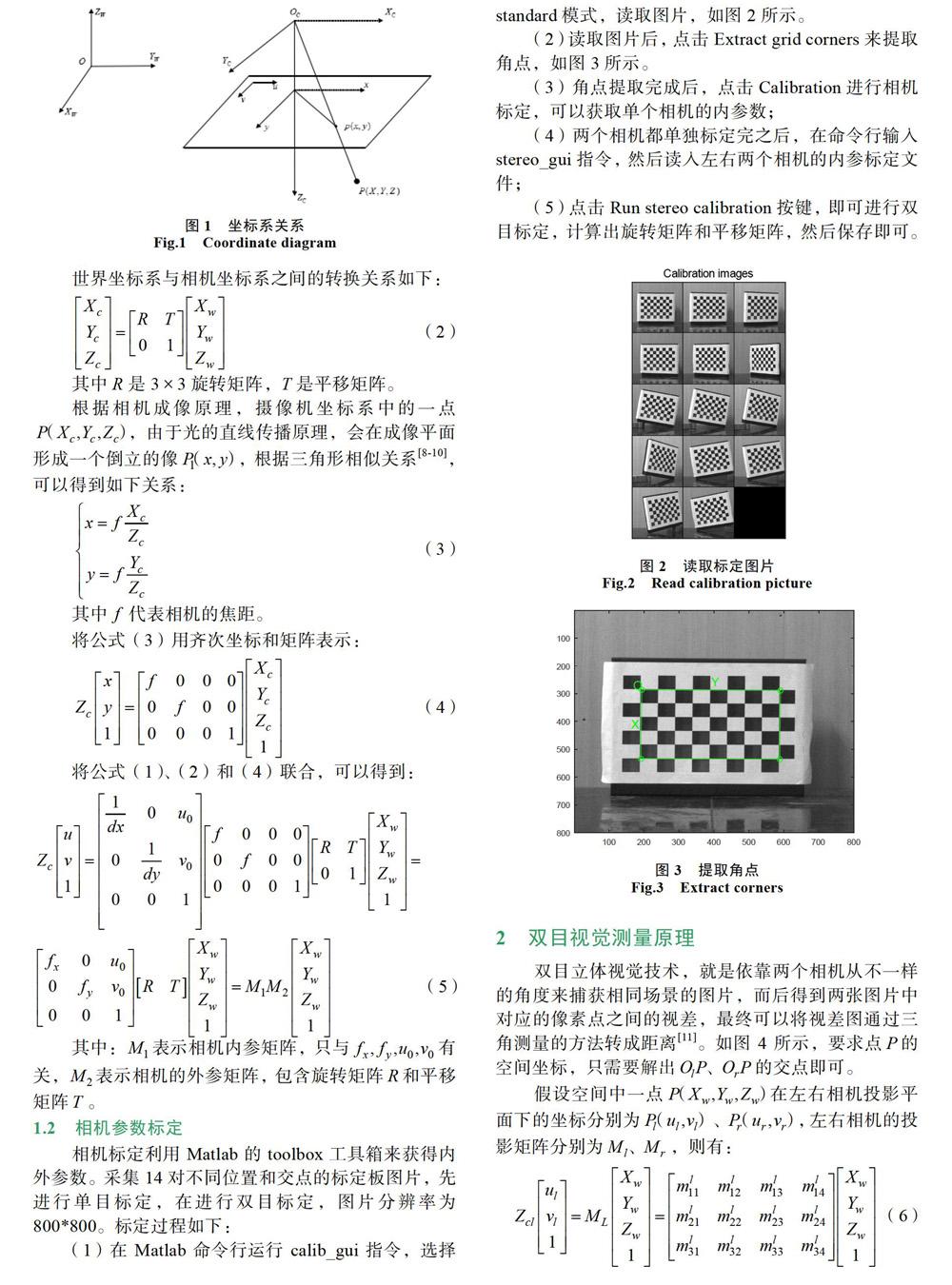
(1)在Matlab命令行运行calib_gui指令,选择standard模式,读取图片,如图2所示。
(2)读取图片后,点击Extract grid corners来提取角点,如图3所示。
(3)角点提取完成后,点击Calibration进行相机标定,可以获取单个相机的内参数;
(4)两个相机都单独标定完之后,在命令行输入stereo_gui指令,然后读入左右两个相机的内参标定文件;
(5)点击Run stereo calibration按键,即可进行双目标定,计算出旋转矩阵和平移矩阵,然后保存即可。
2 双目视觉测量原理
双目立体视觉技术,就是依靠两个相机从不一样的角度来捕获相同场景的图片,而后得到两张图片中对应的像素点之间的视差,最终可以将视差图通过三角测量的方法转成距离[11]。如图4所示,要求点的空间坐标,只需要解出的交点即可。
假设空间中一点在左右相机投影平面下的坐标分别为,左右相机的投影矩阵分别为,则有:
3 立体校正
理想情况下的双目相机系统是两摄像机图像平面平行,光轴和图像平面垂直,极点处于无线远处。但事实上相机的安装的位置看似共面,实际却并非如此。
立体校正就是的作用就是要把消除畸变后的两幅图像严格地行对应,使得两幅图像的对极线恰好在同一水平线上。通过OpenCV中cvStereoRectify 函数立体校正,输入相机内参数,畸变参数,旋转矩阵和平移向量,就能得到行对准校正后的旋转矩阵,左右相机投影矩阵以及重投影矩阵。然后左右图像分别调用cvInitUndistortRectifyMap函数,最后调用函数 cvRemap,得到非畸变图像。
4 实验结果
根据上述理论,利用Matlab对相机标定,标定结果见表1。
5 结论
根据成像原理和双目测量原理对同一平面内的两目标点之间的距离进行研究。并通过Matlab和OpenCV编写代码进行实验验证。研究结果表明该方法实际可行,并且精度很高,尤其在目标距离大于40cm时,效果更好。
参考文献
[1]张国福, 沈洪艳. 机器视觉技术在工业检测中的应用综述 [J]. 电子技术与软件工程, 2013(22): 111-111.
[2]师红宇, 任小玲. 基于机器视觉的棉花异性纤维识别方法 [J]. 软件, 2018, 39(2): 32-34.
[3]李沫. 视觉检测系统在汽车仪表自动化测试方面的应用[J]. 软件, 2018, 39(5): 126-128.
[4]张铖伟, 王彪, 徐贵力. 摄像机标定方法研究[J]. 计算机技术与发展, 2010, 20(11): 174-179.
[5]马颂德, 张正友. 计算机视觉: 计算机理论与算法基础 [M]. 北京: 科学出版社, 1998: 72-75.
[6]曲学军, 张璐, 张凌云. 基于新的成像模型的摄像机标定与三维重建[J]. 仪器仪表学报, 2011, 32(8): 1830-1836.
[7]夏茂盛, 孟祥磊, 宋占伟, 等. 基于双目视觉的嵌入式三 维坐标提取系统[J]. 吉林大学学报: 信息科学版, 2011, 29(1): 61-66.
[8]張曙. 基于机器视觉的机械手抓取控制研究[D]. 上海: 上海理工大学, 2018.
[9]Lu-qiao FAN, Wen-qiong ZHOU, Ban-xiang DUAN, etc. Obtain 3D coordinate of EOD robots based on computer vision[J]. MachineTool & Hydraulics, 2019, 47(12): 143-150.
[10]韩博. 基于双目立体视觉的工件识别与定位关键技术研究[D]. 哈尔滨工业大学, 2018.
[11]张广军. 视觉测量[M].北京:科学出版社, 2008: 49-53.
[12]曲学军, 张璐. 基于双目视觉的三维测量方法[J]. 计算机仿真, 2011, 28(2): 373-377.
[13]Y Yabuta, H Mizumoto, S Arii. Binocular robot vision with active viewpoint for sphere measurement[J]. Key Engineering Materials, 2012, 516: 343-348.
猜你喜欢
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
考试周刊(2016年27期)2016-05-26
电测与仪表(2015年22期)2015-04-09
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
电视技术(2014年19期)2014-03-11