三维波束成形麦克风阵列在风洞测试中的应用
2020-12-19 12:12张东兴Philiphna
汽车工程学报 2020年6期
杨 超,张东兴,Philip Höhna
(1.汽车噪声振动和安全技术国家重点实验室,重庆 401122;2.中国汽车工程研究院,重庆 401122;3.Gfai Tech GmbH,德国,柏林 12489)
随着消费者对汽车乘员舒适性的要求不断提高,研发人员对汽车声学开发工具提出了新的挑战。特别是在车辆正向开发的早期阶段(造型阶段),快速且可靠的车外声源定位分析对于提高乘员舒适性非常重要。而三维麦克风阵列作为声源定位和分析的关键设备,在整车风洞试验中起到重要的作用。
1 简介
中国汽车工程研究院风洞中心的三维麦克风阵列测试系统由4个数据采集前端、3块车外麦克风阵列和1个车内球形阵列组成,每块车外麦克风阵列由168个麦克风和1个高清摄像头组成,每块阵列的尺寸为4.5 m×3 m,如图1所示。两台高性能工作站分别用来采集和分析数据,配有适用于中国汽研风洞中心的特制控制软件。整个麦克风阵列固定在1个阵列支架上,可以在风洞中沿着流场方向移动。需要进行麦克风阵列测试时,将支架移动到测试位置,并使用地面上的固定塔进行紧固。完成测试后,可以将阵列支架移动到停止位置(即喷口上方),避免麦克风阵列对气动测试的干扰。

图1 三维麦克风阵列示意图
波束成形是通过采集声音传到不同位置麦克风的时间延时对声源进行识别和定位。麦克风阵列测试的结果叫声源云图,即声源云图叠加到照片(二维)或者映射到几何模型(三维)上。对于二维波束成形,成像的网格点是位于与阵列平面一定距离(称为焦距)的扫描平面;对于三维波束成形,是将波束成形的结果映射在汽车的三维模型上。通过评估扫描平面或者三维模型网格点的声源传播到麦克风阵列不同位置麦克风的时间差异以及幅值衰减来计算出声源云图[1]。
由于麦克风阵列放置在流场以外,风洞流场区域和麦克风阵列测试区域之间存在剪切层,空气流过测试物体周围产出的噪声源会形成辐射声波,这些声波在通过剪切层的过程中会产生衍射,从而导致声源云图中识别的噪声位置与实际声源位置发生偏移和扭曲。因此,在风洞中使用麦克风阵列必须考虑这种剪切层造成的影响,中国汽研的麦克风阵列依据Amiet模型对剪切层进行修正[2],如图2所示。
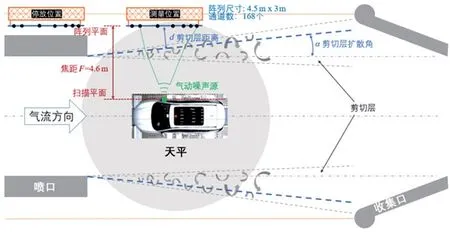
图2 Amiet模型参数及风洞剪切层示意图
2 麦克风阵列标定结果
在无风状态下,距离麦克风阵列的不同位置放置7个声源(扬声器播放白噪声),如图3所示,使用麦克风阵列进行声源定位。通过对比麦克风阵列测试得到的声源云图与实际的扬声器位置偏差,可以测出麦克风阵列声源识别定位的精度,测试结果如图4所示,麦克风阵列的声源识别定位偏差小于10 mm。在风速140 km/h的状态下,在测试车辆侧面不同位置固定3个扬声器,使用麦克风阵列进行声源定位,如图5所示,麦克风阵列的风洞剪切层修正偏差小于20 mm。
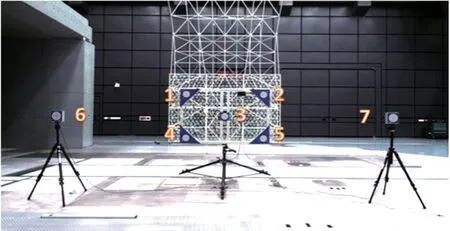
图3 标定扬声器位置
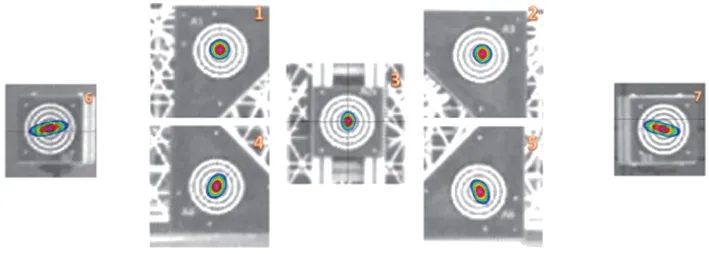
图4 无风状态下标定声源云图

图5 风速140 km/h状态下标定声源云图
3 差异波束成形
修改左侧后视镜形状(用胶带在后视镜壳体上部固定一颗螺栓,制造额外声源),通过车外麦克风阵列测试视镜形状对车外风噪的影响:基础状态左侧阵列声源云图如图6所示,修改左侧后视镜声源云图如图7所示,从这两幅图片无法清晰地看到后视镜形状对车外声源的影响,但可以通过差异波束成形,用图7的声源云图减去图6的声源云图,得出差异云图的结果如图8所示。由图可知,修改左侧后视镜后,后视镜区域噪声源在1~5 kHz明显增加。
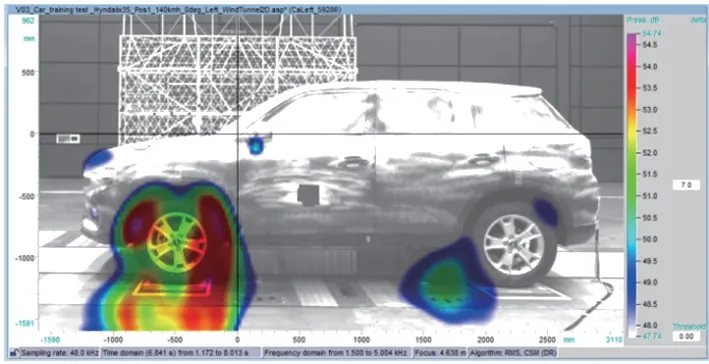
图6 基础状态下的左侧声源定位云图
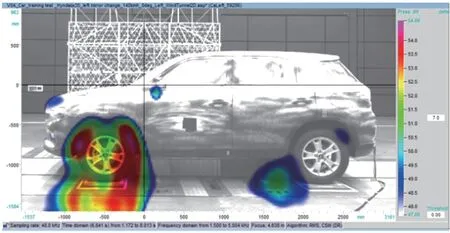
图7 修改左侧后视镜时的左侧声源定位云图
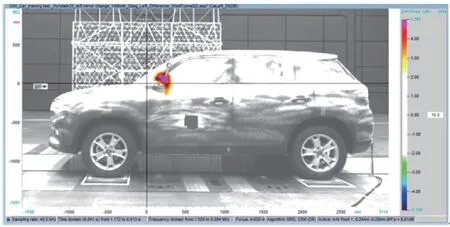
图8 左侧阵列声源定位差异云图
同样也可以得出顶部阵列的差异波束成形云图,如图9~11所示,左侧后视镜区域噪声源明显增加,而右侧后视镜区域声源无明显变化。
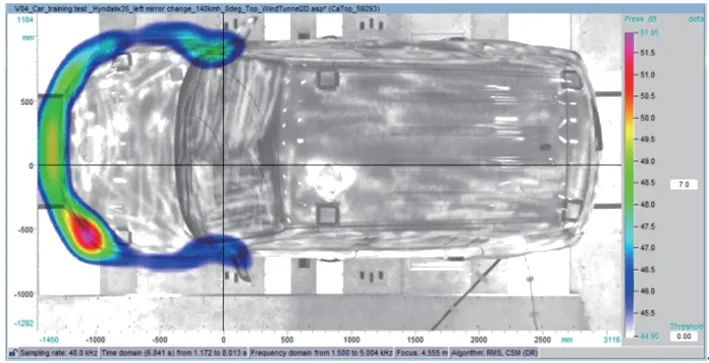
图9 基础状态下的顶部声源定位云图
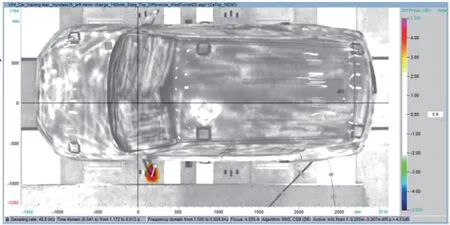
图10 修改左侧后视镜时的顶部声源定位云图
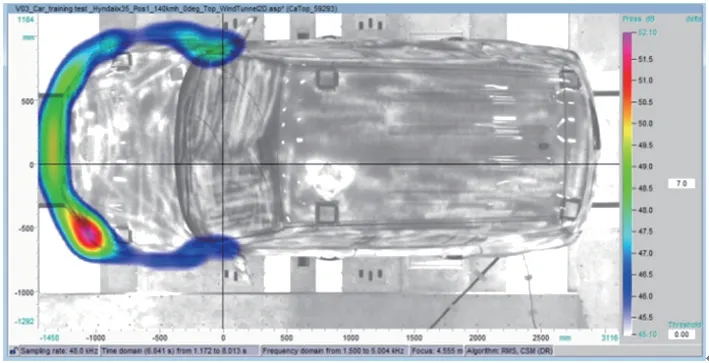
图11 顶部阵列声源定位差异云图
4 相关性分析
中国汽研的麦克风阵列系统还具备相关性分析的功能,主要目的是判断车外声源对车内某个参考位置的噪声贡献量。整套系统由数采前端同步时钟控制,车外麦克风阵列的3个数采前端和车内麦克风阵列的1个数采前端可以进行同步采集。如图12所示,4个数采前端的触发响应时间在1个时间步长(1/192 000 s)以内,麦克风阵列系统能满足192 K采样率的同步要求。如图13所示,没有添加车内麦克风参考通道识别的车外声源云图,只识别出前轮罩、格栅及大灯几处声源;如图14所示,添加车内驾驶室麦克风通道识别的车外声源云图,考虑到外部声源对车内驾驶舱麦克风的贡献量,在相同的动态范围内,能够识别出前轮罩、后轮罩、雨刮槽以及后视镜处的声源对车内主驾驶侧麦克风的噪声贡献量。从这两者的对比云图可以看出:相对于前轮罩和车头位置声源,雨刮槽及后视镜处的声源虽然幅值较小,但对于驾驶舱内的贡献却很大。
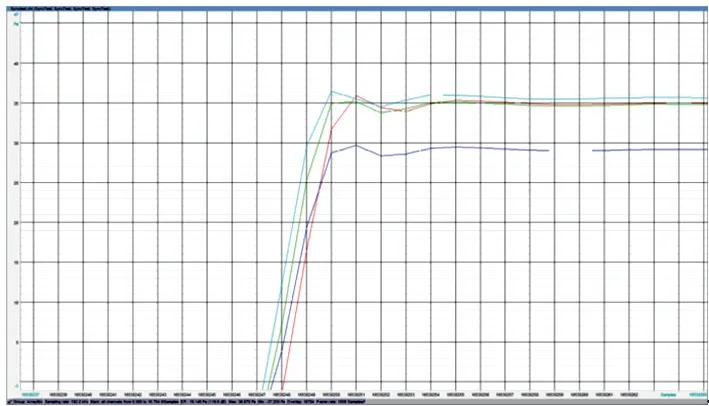
图12 车外及车内数采前端同步触发结果
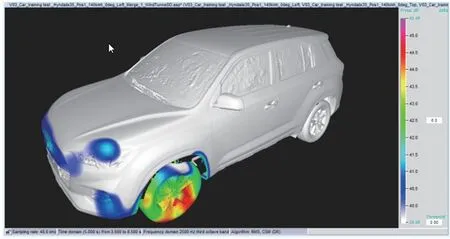
图13 无车内参考通道的左侧声源定位云图
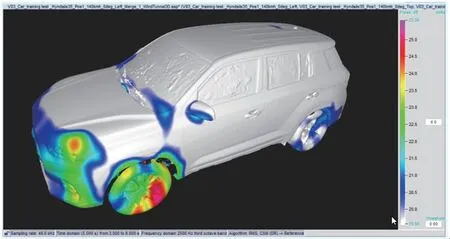
图14 有车内参考通道的左侧声源定位云图
5 三维波束成形
二维麦克风阵列是将声源云图叠加到照片上,成像的网格点位于与阵列平面有一定距离(称为焦距)的扫描平面,成像结果如图15~17所示。中国汽研的麦克风阵列系统具备自动三维扫描功能及车身轮廓自动捕捉功能,具有真正意义上的三维波束成形能力[3]。测试系统会考虑麦克风阵列和试验车辆之间的实际距离,并结合侧面和顶部阵列的评估,综合计算三维波束成形云图[4]。如图18所示,三维声源定位结果是将声源云图映射到车身三维数模上,更加直观并清晰地显示声源在车声周围的分布。
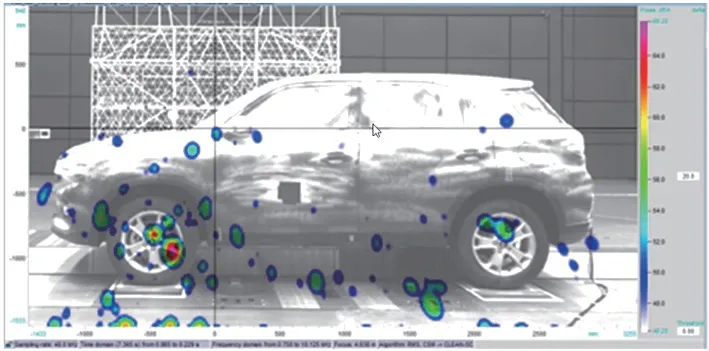
图15 左侧二维声源定位云图
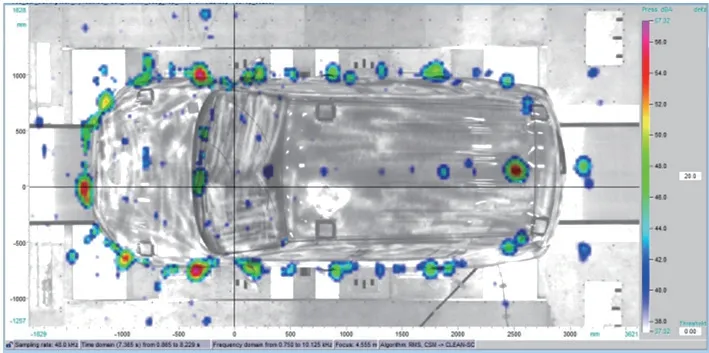
图16 顶部二维声源定位云图
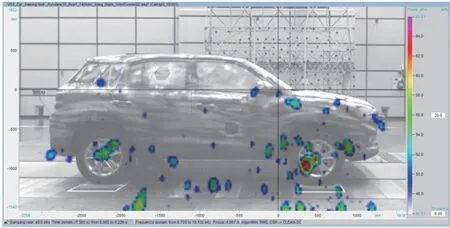
图17 右侧二维声源定位云图
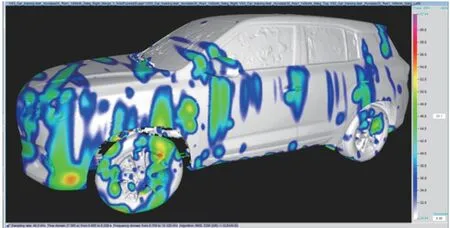
图18 三维声源定位云图
6 结论
气动声源具有三维分布,因此,为了在风洞中获得声源的详细信息需要使用三维波束成形方法。中国汽研风洞中心的麦克风阵列系统具备三维波束成形的能力,具有极好的定位精度和风洞剪切层偏移修正精度,同时具备差异云图分析及相干性分析等高级功能,为整车风噪性能开发提供强有力的测试工具。
猜你喜欢
应用声学(2022年5期)2022-11-21
舰船科学技术(2022年11期)2022-07-15
汽车工程学报(2022年3期)2022-06-10
航空学报(2022年2期)2022-03-29
少儿科技(2021年4期)2021-01-11
环球飞行(2020年11期)2020-01-11
发明与创新·中学生(2019年1期)2019-03-23
发明与创新·中学生(2019年2期)2019-02-26
数学大王·中高年级(2018年11期)2018-12-17
中国新闻周刊(2017年21期)2017-06-15