
通信技术对自动驾驶发展的关键作用
2020-12-23 08:06李源丁郁郄雅坤张春天
移动通信 2020年11期
李源,丁郁,郄雅坤,张春天
(中国移动通信有限公司研究院,北京 100053)
0 引言
自动驾驶是汽车产业与新一代信息技术深度融合的产物,是未来发展智慧交通、智慧城市的重要方向,已成为世界各国争抢的战略制高点。目前产业内自动驾驶技术的发展划分为两大阵营,以汽车制造商为代表的ADAS(Advanced Driving Assistance System)与单车智能技术阵营,以及以通信与互联网企业为代表的网联化和人工智能化技术阵营,并由此引申出了以下两种自动驾驶定义。
基于单车智能的自动驾驶:依托车辆自身智能化水平,依靠人工智能、视觉计算、雷达、监控装置和全球定位系统之间的协同合作,让车载计算机能够在不受任何人为干预的情况下自动安全地驾驶车辆[1],如图1所示:

图1 基于单车智能的自动驾驶示意图
基于网联化的自动驾驶:依托V2X(Vehicle to Everything)通信技术,搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与交通参与者(行人、车辆、路侧基础设施、网络等)之间的智能信息交换共享,具备复杂的环境感知、智能决策、协同控制和执行等功能,可实现安全、舒适、节能、高效的行驶,并最终可取代人工驾驶[2],如图2所示:

图2 基于网联化的自动驾驶示意图
由以上两种定义可以看出,随着通信技术的发展,汽车行业正在经历前所未有的转型,自动驾驶技术正逐渐由单车智能转向网联化,而V2X通信技术作为智能网联汽车中的信息交互关键技术,可用于实现车辆与交通参与者之间信息共享与协同控制的通信保障。目前,全球范围用于V2X通信的主流技术包括IEEE 802.11p技术和基于蜂窝移动通信系统的C-V2X(Cellular Vehicle to Everything)技术(包括LTEV2X和5G-V2X)。标准化组织3GPP一直持续推动C-V2X通信技术标准的迭代演进,已于2020年6月发布第一版5G-V2X(R16)标准,预计将于2021年12月发布5G-V2X(R17)标准。
与此同时,中国政府一直以推进基于C-V2X技术的智能网联汽车发展为主线,可弥补单车自动驾驶自主感知方面的局限,让自动驾驶的实现不仅仅依托智能的车,同时与强大的网、智慧的路协同发展。2013年美国国家公路交通安全管理局(NHTSA)发布了汽车自动化的五级标准,2014年美国机动车工程师学会(SAE)发布了六级标准,2020年3月中国工信部也公示了我国《汽车驾驶自动化分级》标准,并拟于2021年1月1日开始实施。此标准将驾驶自动化分为0-5共6个等级:0级应急辅助,1级部分驾驶辅助,2级组合驾驶辅助,3级驾有条件自动驾驶,4级高度自动驾驶,5级完全自动驾驶,为中国后续自动驾驶相关法律、法规、强制类标准的出台提供支撑[3]。
基于以上背景,本文将通过通信技术的演进,分析其对自动驾驶技术发展的影响。第二部分,从技术方面、成本方面、社会效益等方面分析通信技术在自动驾驶发展道路上起到的作用。第三部分,针对R16 5G-V2X进行详细介绍,分析目前技术仍存在的不足。第四部分,总结了全文主要观点,并强调了通信对未来网联化自动驾驶的重要性。
1 通信技术在自动驾驶发展道路上的作用
随着通信技术的发展,自动驾驶技术正逐渐由单车智能转向网联化,C-V2X通信技术作为网联式自动驾驶中的信息交互技术,对自动驾驶技术的发展起到了至关重要的作用。C-V2X技术不仅帮助自动驾驶实现了技术上的飞跃,还可有效降低自动驾驶技术的实现成本,提高城市交通安全性和通行效率,从而降低了交通系统整体的能源消耗。
1.1 技术优化
C-V2X通信技术将解决自动驾驶面临的一些技术瓶颈问题,对以数据为基础的自动驾驶业务产生不可估量的影响,是成功实现自动驾驶的基础[4]。自动驾驶车辆通过C-V2X通信技术带来的高速通信链路,突破车辆自身感知能力、信息交互以及计算能力等方面的局限。
在车辆感知与信息共享方面,目前单车智能依赖的传感器主要是毫米波雷达、激光雷达等,只能检测视距范围内的车辆,感知范围约为300 m[5],且易受天气等因素的影响。C-V2X通信技术具有低时延、高速率、大带宽和高可靠的特性,可实现车辆内部、车辆之间、车与交通基础设备、车与行人以及车与云端的全方位网络连接,在较大范围内(感知范围可达千米级别[5])准确感知周围道路、环境以及车辆状态(如位置、速度)等信息并实时共享,是传统感知方法的高效互补,可有效解决单车智能的信息孤岛问题。例如在小车变道超大车的场景中,自动驾驶车辆在大型货车后面行驶,若想超车需提前得知货车前方车辆状态信息。基于车辆信息的实时共享,货车通过无线通信链路将自身感知到的前方车辆信息传输到自动驾驶车辆中,实现车辆“透视”[4]。该场景示意如图3所示:
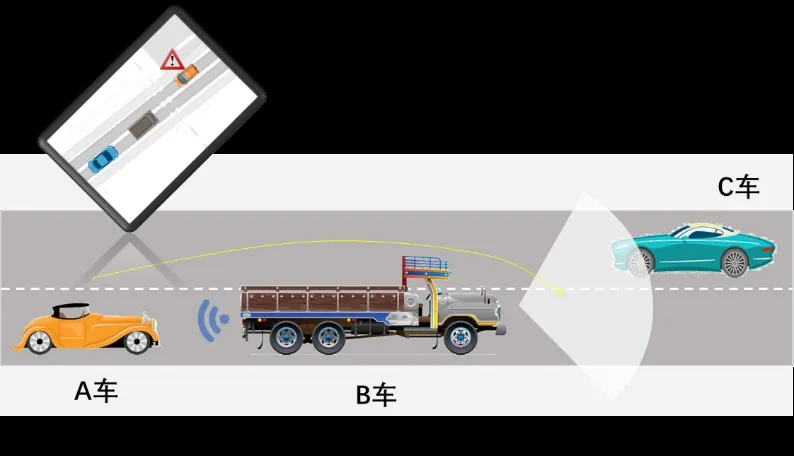
图3 小车变道超大车场景示意图
在智能计算方面,基于单车智能的自动驾驶产生数据量可达到每秒1 GB,因此对于数据存储、分析等方面的计算能力要求非常高[6-7]。基于C-V2X通信技术,大量计算负载任务可以转移至多接入边缘计算MEC(Multiaccess Edge Computing)节点完成。MEC节点可以结合天气、道路、交通状况以及其他车辆信息等全量数据,完成融合计算,在满足低时延、高带宽的同时,实现信息的全维度高效回传与交互,从而大大降低了车端自身对于计算能力的要求。
1.2 成本控制
因为通信技术的影响网联自动驾驶车辆可以获取路侧或者其他车辆的感知信息,并将车辆部分计算需求委托至路侧、MEC、云端完成,因此网联式自动驾驶车辆对车载传感器的数量及精度需求降低,对车载计算单元性能要求也大大削弱,网联式自动驾驶车辆的成本也因此降低了。
单车自动驾驶高度依赖单车感知和计算技术,传感器获取信息后,将信息传递给车载计算单元,车载计算单元计算最优的路径,并做出驾驶决策。因此单车智能的自动驾驶对车载传感器、车载计算单元的数量、精度、性能都有较高的要求。目前,单车智能自动驾驶测试车需配置激光雷达、毫米波雷达、高清摄像头、超声波雷达等高精度传感设备,平均成本在20万美元左右。如全球首款量产版L3级别自动驾驶车辆奥迪A8,配置有1个激光雷达、1个红外摄像机、4个中程雷达、1个远程雷达、1个前置摄像头、4个360度全景摄像头、12个超声波雷达。同时A8使用了四个不同的处理器,Nvidia Tegra K1用于交通信号识别、行人检测、碰撞警告、光检测和车道识别,英特尔/Mobileye的EyeQ3负责图像处理,Altera Cyclone和Infineon Aurix Tricore单元执行其他处理任务,成本非常高昂[8]。车路协同的自动驾驶车辆可以通过网络全面感知道路信息,包括交通事件、定位、其他车辆或者行人、天气、路面信息等,同时路侧边缘计算单元还可以提供路侧计算能力并辅助车辆进行驾驶决策。因此,网联自动驾驶对车辆传感器的数量及精度、对车载计算单元的性能要求都低于自主式自动驾驶,车路协同的自动驾驶车辆的生产成本也要远低于单车式的自动驾驶车辆。
与此同时,基于C-V2X的网联式自动驾驶所需路侧设施的部署和维护,可以借助运营商已经部署的基站设施及通信线路设施完成,大大降低了部署和维护的成本。据2020年6月工信部举行的“5G发牌一周年”峰会公布,全国已建成超过25万个5G基站。预计到今年年底,我国5G基站数将达到65万个,实现全国所有地级市室外的5G连续覆盖、县城及乡镇重点覆盖、重点场景室内覆盖,光纤管道铺设至全国地市以上城区主要道路路口。基于C-V2X的网联式自动驾驶路侧设施可以借助运营商已开通基站开设C-V2X通信服务,还可借助运营商已铺设光纤管道资源实现信息的快速回传。路侧设施的部署和维护成本将大大降低。
1.3 社会效益
通信技术对自动驾驶发展带来的社会效益主要体现在两个方面:降低车辆行驶能耗和提升城市交通安全与通信效率。
在降低车辆行驶能耗方面,通过把云端、路侧、其他车辆等的感知信息进行共享,通信技术可以帮助自动驾驶车辆获得全方位的道路交通信息,做出最有利的行驶规划和决策,降低车辆行驶能耗,这一点在车辆编队行驶中显得尤为突出。在自动车辆编队行驶业务中,自动驾驶车辆在道路上行驶,同向行驶的多辆汽车可组成车队,车队成员间、车队与外部的信息实时共享,保证高效可靠的编队行驶。车队中的车辆可以保持较小的车间距离,并以固定的速度行驶。编队行驶可以提升交通效率,有效降低10%以上的车辆燃油消耗,降低8%~16%的碳排放量。
在提升城市交通安全与通信效率方面,通过车-路-云信息互通,城市交通管理者可以获取全面的城市道路交通信息。这些信息可以帮助城市管理者更好的进行城市道路规划和交通管理,提高城市整体交通安全和通行效率。
2 R16技术增强
3GPP从2017年起发布了全球第一版LTE-V2X(R14)标准,主要通过广播方式,辅助车辆实现基本安全业务。2018年,增强版的LTE eV2X宣布完成,网络架构与LTE-V2X相同,主要针对PC5接口的增强,但业务范围并没有很大的提升。为了满足更高级辅助驾驶以及部分自动驾驶业务的需求,2020年6月,第一版5G-V2X(R16)标准问世,主要面向更高级的车联网应用,提供更灵活、更可靠、更快速、更高数据速率的通信服务。在3GPP TS22.186中,通信可满足的自动驾驶业务需求被分为四大类:车辆编队、远程驾驶、传感器信息共享及高级驾驶,对通信的需求可如表1所示,同时对高精度定位也提出了横向0.1 m,纵向0.5 m的严苛要求[9]。

表1 eV2X业务需求
在5G-V2X版本中,为满足以上V2X应用超低时延、超高可靠性等通信要求,针对NR(New Radio)新空口的物理层信号、信道结构进行了增强,并引入了部分带宽概念以实现灵活的资源配置,在空口的性能优化对车联网应用场景提供了支持。低时延方面,为支持V2X 3 ms端到端超低时延需求,NR-V2X支持更加灵活的物理层结构,即引入60 kHz子载波间隔支持更短的子帧结构,NR sidelink支持基于预配置资源的免调度传输方案。高可靠方面,5G-V2X支持单播及组播,并支持HARQ等重传技术,确保99.999%的超高可靠性。同时,NR sidelink既支持ITS频段,又可扩展到IMT频段,从而创造了更多的业务空间,拓展了更多的应用模式。
另外,5G V2X除物理信道增强外,还引入了V2X通信切片、边缘计算、QoS预测等特性。
V2X切片技术:车联网的应用场景非常丰富,业务需求呈现出多样性的特征,既有大带宽、数据传输速率高的特需求,又有对可靠性、时延等要求高的需求,因此对车联网可考虑三种类型切片,第一类eMBB切片,支持车内娱乐、视频应用及在线游戏等业务需求,保障车内休闲娱乐所需的大带宽、游戏加速等网络需求;第二类是V2X通信切片,支持驾驶相关业务的网络需求,例如远程遥控驾驶等,需要保障低时延、高可靠性、业务连续性等需求;第三类切片是针对汽车厂商定制化的切片,可以由车厂单独运营,支持某品牌车辆特有服务,如远程问题诊断等。
边缘计算技术:MEC技术将计算、存储、业务服务能力向靠近终端或数据源头的网络边缘迁移,具有本地化处理、分布式部署的特性。MEC与C-V2X的融合是将C-V2X业务部署在MEC 平台上,实现“人-车-路-云”协同交互。面向车联网的MEC一方面通过将业务部署在边缘节点,减少数据传输路由长度,以降低C-V2X网络的端到端通信时延;另一方面MEC作为本地服务托管环境,能够提供强大的计算、存储资源,支持部署本地更具地理和区域特色、更高吞吐量的车联网服务。
QoS预测:车联网业务有别于其他5G网络业务,对通信性能的改变十分敏感,因此,提前告知车辆下一阶段所面对的网络性能,对提前部署调整相关业务具有极大的参考意义。面对这一需求,5G网络引入了智能网元NWDAF,通过采集分析数据,提前预判某车辆进入的小区是否能够满足5G-V2X业务的QoS需求,从而提前将信息通知给车辆,当车辆获悉小区的QoS需求不能满足当前业务需求,车辆将调整驾驶策略,保障车辆安全行驶。此外,5G-V2X应用还将反馈给网络最高QoS需求和最低QoS需求。当基站资源充足时,网络可以选择应用指定的最高QoS需求进行参数配置;当基站资源不足时,为了保障5G-V2X业务(如自动驾驶)的连续性,基站对QoS参数降级处理,采用最低QoS需求进行参数配置,从而最大限度保障5G-V2X的业务。
业务连续性:业务连续性是指在终端移动状态下,通过不同网络侧会话管理机制来保障车辆快速移动状态下不同UPF切换时的业务体验。目前3GPP标准中R15版本定义的保障业务连续性主要有三种模式:模式一维持充当PDU会话锚点的UPF保持不变;模式二在建立新会话前先释放原有会话,改变会话锚点的UPF;模式三在新会话建立一段时间后再释放原有会话,保证业务平滑迁移。在R16版本中又增加了一种高可靠低时延的业务连续性方案,在涉及到切换的两个UPF之间建立转发通道,通过边缘UPF的协同,保障车辆在移动过程中会话不中断,从而保证业务的可靠性,提升用户体验以及安全性。
3 现存的问题
基于5G的演进发展,R16在技术性能方面已取得了很大的突破,根据目前3GPP的仿真结果以及和产业的反馈,已能够满足部分自动驾驶应用的需求,尤其在特定区域、特定道路及环境下的业务,如矿区、港口和园区等。为自动驾驶产业发展迈出第一步提供了关键的技术支撑。但随着自动驾驶业务的逐渐丰富,以及使用环境的复杂化、灵活化,通信技术仍需不断增强,才能提供更优质的服务。同时,网联能力的增强,也将逐步降低单车智能成本,将“车-路-云”的资源进行协同,达到“智能的车-智慧的路-强大的网”的最优化解决方案。总的来说,通信技术在演进与业务扩展,商用部署落地等方面仍需优化。
技术演进增强方面,R16对延迟和可靠性进行了显著优化,但面向未来全自动驾驶业务的实现仍存在技术短板。根据TS38.885的仿真结果,Uu通信的端到端时延可以控制在10 ms以下(理论值可以保持在5 ms以下),可靠性可以达到99.999%。基于sidelink通信的时延可以保持在2 ms以下,HARQ重传机制可以提高可靠性,但需要牺牲时延和带宽资源[10]。根据5GAA的估计,NR-V2X需要40 MHz的sidelink通信带宽,单个用户的峰值速率可以达到100 Mbit/s以上。以上数据来源于现有的标准评估和仿真结果,虽然理论上可以满足单个用户或单个业务的需求,但对于未来的全自动驾驶业务,为了确保驾驶安全和用户的舒适性,需同时满足大量交通参与者在延迟、可靠性和带宽方面的严格要求,对于现有技术能否实现这一点,仍存在不确定性。同时,3GPP TS 22.186中提到的自动驾驶高精度定位要求在目前R16定义的技术标准中无法得到满足(目前只能达到横向10 m),未来行人和其他低功耗终端的资源受限问题需要在新的技术标准中加以解决。全自动驾驶系统是一个复杂的系统,需要对整个系统进行全方位的大量实际测试,尽可能模拟实际商用情况,制定出完整的解决方案,以便更好地满足商用化需求。
商用落地应用方面,目前已趋于成熟的LTE-V2X技术部署情况还有待推进,基于5G-V2X的业务应用更需要大力推进。总体来看,基于C-V2X技术的自动驾驶落地仍然面临着以下主要问题:一是关键产品还未达到商用化,C-V2X商用部署的芯片、车载终端、路侧基础设施等关键产品已可用于示范验证,但离商业部署仍有差距;二是基于网联化的自动驾驶商业模式不清晰,市场动力不足,整个产业没有形成核心的凝聚力,导致通信及其他相关产业推动力量发散,规模化进展缓慢。
4 结束语
本文从通信角度出发,阐述了网联化自动驾驶的含义及发展方向,分析了通信技术给网联化自动驾驶带来的技术、成本、社会效益等各方面的提升,详细分析了3GPP R16 5G-V2X技术性能优化对网联化自动驾驶带来的重大影响。最后,本文总结了目前网联化自动驾驶尚未解决的两大问题。自动驾驶的发展需要大量的技术投入以及产业各方的共同努力,通信将会是其中重要的一环,通过不断的迭代演进与验证测试,才能最终实现网联自动驾驶的美好目标。
猜你喜欢
意林彩版(2022年1期)2022-05-03
内燃机与配件(2022年2期)2022-01-17
高技术通讯(2021年3期)2021-06-09
读友·少年文学(清雅版)(2020年1期)2020-05-20
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
东南大学学报(自然科学版)(2018年1期)2018-02-08
领导决策信息(2017年9期)2017-05-04
岷峨诗稿(2017年4期)2017-04-20
中国公共安全(2017年9期)2017-02-06
