
不同气象环境的元胞自动机交通流模型构建与分析∗
2020-12-23 11:49芮伟戚湧
计算机与数字工程 2020年11期
芮 伟 戚 湧
(南京理工大学计算机科学与技术学院 南京 210094)
1 引言
交通过程是一个复杂的过程,近年来对交通过程的研究已经引起了人们的重视。其中元胞自动机(Cellular Automaton,CA)交通流模型能够根据实际情况灵活设置车辆运行规则,具有良好的并行性,因而在交通流研究领域得到了广泛应用。在不同的天气条件下交通流的特性也不尽相同,不同的天气条件有很多,如降雨、降雪、不同的能见度等,影响包括对车辆状态、行驶速度、交通流密度等。对于在不同天气状态下交通流的特性研究,可以帮助解决实际交通中遇到的问题,改善交通状况,具有很现实的指导意义[1~8]。德国学者Brilon 和Ponzlet 调研德国的高速路段,总共统计15 个路段,包括10个四车道的高速路和5个六车道的高速路,研究的内容集中在环境条件对于高速路的影响,主要是速度-流量的变化。研究表明:该路段晚上车辆平均行驶速度降低5km/h,四车道与六车道在路面条件湿滑的情况下平均速度分别下降9.5km/h 和12km/h[9]。美国学者Kyte M 等以美国84 号高速公路为样本进行研究,分析高速公路上车辆在不同天气条件下速度的差异。通过进行统计分析,结果表明在小雨、小雪以及大雪天气下,速度的折减率相比于HCM2000 中给出的值降低了20%[10]。通过深入观察与分析降雨量数据、浮动车数据(FCD),曾伟良等从不同层面、不同角度对广州市城市道路交通运行速度因降雨天气产生的影响进行深入探析。研究发现在降雨和正常天气情况下,道路上车辆的速度存在很大不同,降雨等级不同造成汽车速度也不相同[11]。张存保通过进行实地数据采集,针对高速公路在降雨天气下的交通流特性进行分析,发现降雨量越大,速度降低越快,实际数据分析得出小雨、大雨的自由流速度分别下降5km/h 和19km/h[12]。本文针对不同的气象条件,建立CA 模型,通过数值模拟,得到不同气象条件下车速、流量、密度数据及相互关系,并分析不同程度的气象条件对交通流的影响[13~15]。
2 模型建立
2.1 降雨条件下的CA模型
设定道路的长度为L,分成N个元胞组成,任何一个元胞在任意时刻的状态只有无车或者被占据两种;由于车辆长度和安全距离的影响,一辆车可以占据多个元胞。第i 辆车的速度vi(i=0,1,2…vmax),其中vmax为车辆最大期望速度,设定每个时间步长为1s。本文的研究仅仅针对小客车,同时,设定每辆车的最大期望速度和制动减速均为一样。
在构建的模型中,车辆三种状态:
1)两车间距远远大于安全距离,车辆进行加速,直至达到最大期望速度;
2)行驶过程中的车辆速度依赖于前方车辆的速度以及和前方车辆的距离,要保证安全的行车距离,以此进行速度的调节;
3)当两车间距不断缩小,驾驶员要减速保证安全。
降雨条件下对交通流的直接影响是车辆速度降低、车辆距离增加,因此,该模型引入一些参数:
β:降雨条件下的速度参数,取值0~1之间;
βi·vmax:i 种降雨条件下的最大期望速度;
α:降雨条件下的间距参数,取值大于1;
α·ds:i 种降雨条件下最小安全距离;
Ls:可视距离。
具体演化规则如下:
1)判断前车车距di与可视距离Ls
2)车辆状态
(1)加速

其中,vi:当前车辆i 的速度;vmax:最大期望速度;di:当前车i 与前车间距;ds:最小安全距离;xi:当前车i 的位置。
步骤1:降雨天气下,对驾驶员的视力有明显的影响,并且会造成道路的湿滑,所以最小安全距离会减小,因此对于两车之间的距离要进行不断的判断,如果大于最小安全距离,保持原有状态进行行驶;如果可视距离小于最小安全距离,则不能保持原有行驶状态,驾驶者根据可视距离的大小,选择随机慢化或者减速。
步骤2:根据规则(1),在前方道路无车或者两车间距足够大,驾驶员进行加速,直至达到最大速度vmax,在降雨天气下,加入了降雨速度参数,因此加速到最大的速度为βi·vmax,小于正常天气下的最大期望速度。根据规则(2)和(3),由于降雨的影响,两车间的最小安全距离减小,在行驶过程中,则驾驶员通过预判,以概率p 进行减速,如果两车间距以及小于安全距离,则此时必须进行减速,以防止事故的发生。车辆的行驶状态不断变化,根据规则(4)进行位置的更新,最终完成CA模型中车辆运动演化的全过程。
2.2 冰雪条件下的CA模型
由于降雨对交通流的影响与降雪基本一致,因此在此采用相同的模型,为了区别降雨与降雪对交通流具体的影响,只在下面数值模拟时,参数的设定进行区分。
2.3 低能见度下的CA模型
能见度的不同对于车辆的行驶状态有着显著影响,为保证行车的安全,在较低的能见度情况下,驾驶员会采取较多的减速行为,而减少加速行为。同样,该模型引入一些参数:
β :不同能见度条件下的速度参数,取值0~1之间;
βi·vmax:i 种能见度条件下的最大期望速度;
α:不同能见度条件下的间距参数,取值大于1;
α·ds:i 种能见度条件下最小安全距离;
Ls:可视距离。
具体演化规则如下:
1)判断前车车距di与可视距离Ls

其中,vi:当前车辆i 的速度;vmax:最大期望速度;di:当前车i 与前车间距;ds:最小安全距离;xi:当前车i 的位置。
步骤1:在不同能见度,对于可视距离的判断最为重要,如果可视距离足够大,大于最小安全距离,则对行驶状态无影响,如果可视距离较小但是可以判断两车车距,并且小于最小安全距离,则需根据可视距离的大小进行随机慢化或者减速,如果可视距离非常小,无法判断两车间距离,此时车辆在随机慢化、减速、紧急制动、加速不同状态下进行。
步骤2:根据规则(1),在前方道路无车或者两车间距足够大,驾驶员进行加速,直至达到最大速度vmax,在不同能见度的天气下,加入了能见度速度参数,因此加速到最大的速度为βi·vmax,小于正常天气下的最大期望速度,在不同能见度天气下,加速度行为较小。根据规则(2)和(3),如果由于能见度的原因,可视距离的不同造成了三种减速行为,在能见底最低时,紧急制动行为频发发生,一般情况下是减速与紧急制动相结合,能见度较高时,主要是随机慢化。车辆的行驶状态不断变化,根据规则(4)进行位置的更新,最终完成CA模型中车辆运动演化的全过程。
3 数值模拟
本文均采用开放性边界条件,系统长度L 取1000,道路长度为2000m。
3.1 降雨模型数值模拟
将降雨的等级分为正常、小雨、中雨、大雨四种类型,由于降雨过程不仅造成道路湿滑,而且会对于驾驶者的视线造成影响,因此与降雪参数设定不同。对应βi取值分别为1、0.9、0.75、0.6,对应αi取值分别为1、2、3、4。取正常天气下的最大速度vmax为12元胞/时步,对应为86.4km/h。正常情况下,为了保证车辆安全,车辆的制动要好于其加速,因此,设定加速度值为0 或1,减速度值为0 或2。由于降雨条件下道路湿滑程度相对于降雪条件要小很多,因此对于正常天气条件下取p0为0.35,静止车辆p为0.3,运动车辆p 为0.25;降雨条件下取p0为0.4,静止车辆p 为0.35,运动车辆p 为0.27。降雨条件下的交通流参数关系如下图1所示。
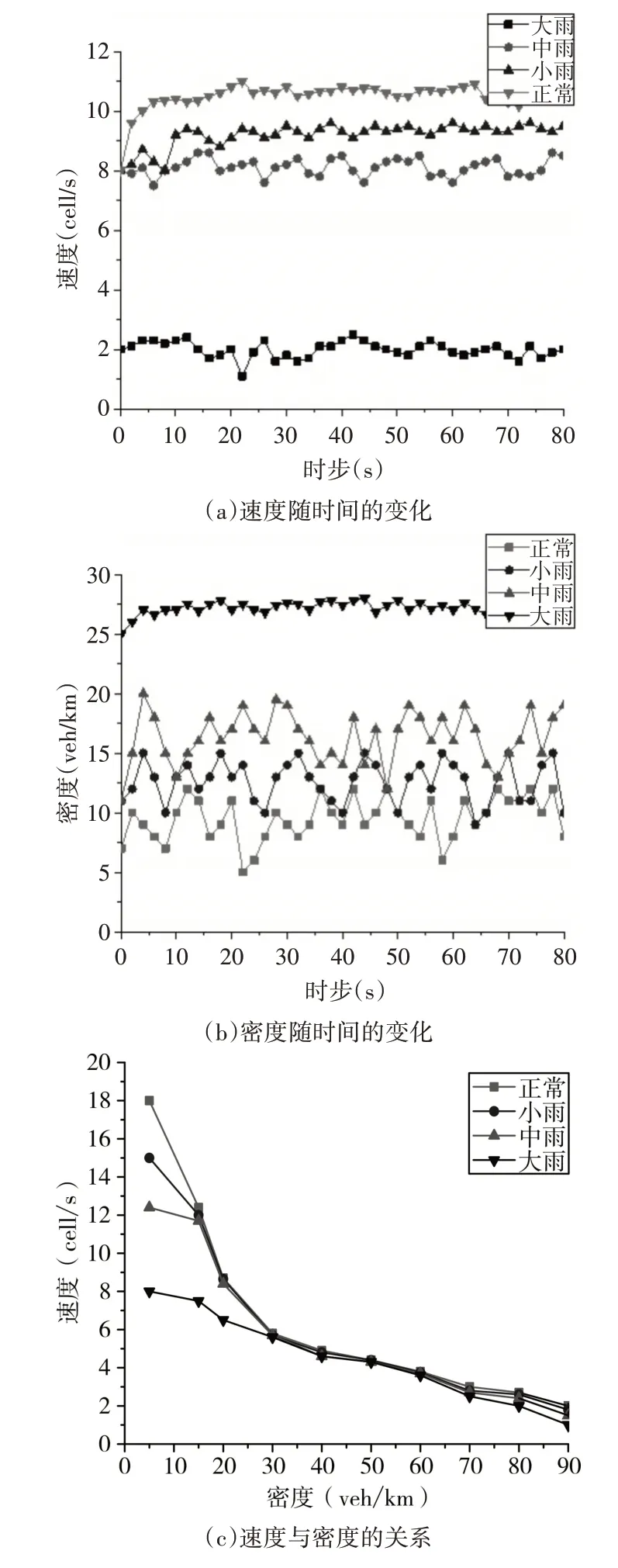
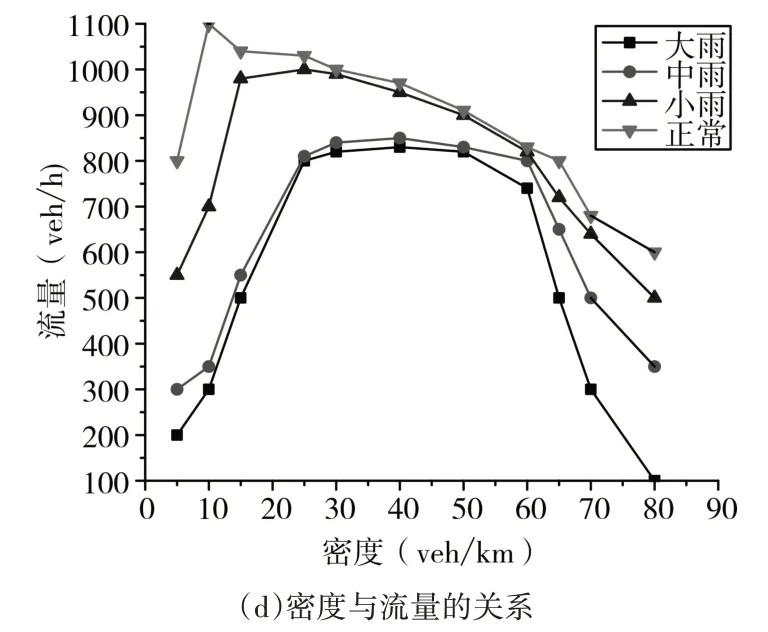
图1 降雨条件下的交通流参数关系
由于建立统一的模型,所以各个关系曲线的走势基本一致,唯一不同的是参数值的不一致,对比降雪模型分析,小雨与中雨过程中,速度值要大于降雪过程,原因是降雨过程中对于路面的湿滑程度影响要远远小于降雪过程,但是在大雨条件下,速度值要小于大雪情况下,原因是大雪不仅造成路面湿滑,同时造成了视线降低,为保证安全,进一步降低行驶速度;密度值在小雨与中雨情况下要低于小雪与中雪,因为其速度值较大,而大雨过程中由于速度要低于大雪过程,因此造成密度增加;随之密度的增加,速度呈下降趋势,大雨过程中,波动性较小,为保证安全,其行驶速度值很低,相比于大雪情况,其波动更加平稳,原因是大雨不仅造成路面湿滑影响行驶,而且影响驾驶视线,安全起见,速度会更低,因此波动较小,而小雨与大雨波动相对较大;流量的分布和降雪模型基本一致,不同之处在于中雨与大雨的安全距离不同,中雨为3,大雨为4,因此大雨的曲线更陡。
3.2 冰雪模型数值模拟
将降雪等级分为正常、小雪、中雪、大雪四种情况,此时相应的βi值为1、0.83、0.67、0.5,αi相对应的取值为1、2、3、3(交通调查显示:在中雪与大雪时,最小车头间距无太大区别)。设在正常的天气条件下,最大速度vmax为12元胞/时步,也就是实际情况下的86.4km/h。正常情况下,为了保证车辆安全,车辆的制动要好于其加速,因此,设定加速度值为0 或1,减速度值为0或2。正常天气条件下取p0为0.35,静止车辆p 为0.3,运动车辆p 为0.25;冰雪条件下取p0为0.5,静止车辆p为0.4,运动车辆p为0.35。降雪天气下的交通流参数关系如图2所示。
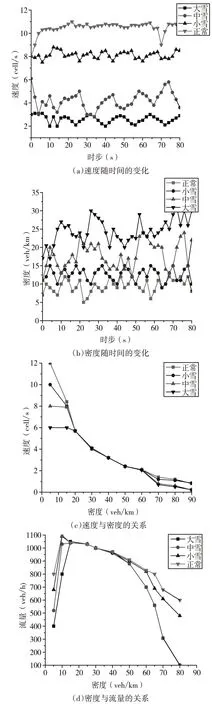
图2 降雪天气下的交通流参数关系
(a)图为速度随时间变化的曲线,可以看出正常天气时,道路条件良好,驾驶员不受外界环境的干扰,会以最大期望速度进行驾驶,并且减速行为较少,因此车速高、波动小。在小雪与中雪情况下,车速低于正常天气,由于降雪的影响,路面湿滑,驾驶员为保证行车安全会采取一定的减速行为,因此速度的波动相对较大一些。在大雪情况下,驾驶员谨慎驾驶,驾驶速度很低,路面情况很差,因此速度的波动会比较小。
(b)图密度随时间不断变化,在正常天气下,车流顺畅,无特殊情况不会造成车流的拥堵,因此密度较小,波动性也较小,在降雪天气,由于降雪造成路况变差,车速降低,车流密度会增加,在中雪条件下,波动较大,小雪与大雪是两者对立情况,小雪由于车流相对顺畅,所以波动较小,大雪由于行驶缓慢,因此波动也较小。
(c)图是速度与密度之间的变化曲线,可以明显的看出:密度越大,速度越小,当密度较小时,正常天气与小雪天气的速度变化曲线大体相同,而且行驶速度较高;车辆行驶速度越快,需要的行驶空间就越高,因此,当密度增大时,无法进行高速行驶,因此,速度迅速降低。该现象主要表现在正常天气与小雪天气,在中到大雪天气时,因为本身行驶速度不高,所需行驶空间较小,对于密度的变化,速度变化比较缓慢。在中等密度时,可以看出,所有曲线基本重合在一起,此时道路区域饱和,密度的影响已经超过天气因素的影响。在高密度时,道路已经形成堵塞状态,速度降低,为保证行车安全,在中雪与大雪天气下,行车安全距离明显大于正常情况。
(d)车流量随着密度的变化关系图,图中的曲线可以分为三个部分:自由流、跟驰堵塞、严重拥堵。可以看出曲线有两个明显的拐点,分别对应三种状态的分界点,拐点1 为自由流阶段与跟驰堵塞的分界点,拐点2 位跟驰堵塞与严重拥堵的分界点。密度的增加,车流量先是迅速增加,然后平缓过度,在直线下降的一个过程。在在拐点1 之前属于自由流的阶段,流量与密度成正比关系,与交通流三参数关系相吻合,由于不同天气下的速度不一致,导致增长的速率不同;位于拐点1与拐点2之间的是跟驰堵塞阶段,曲线有下降趋势,但相对来说比较平缓,影响该阶段的因素是密度而非天气情况,因此曲线重合,超过拐点2 的即为严重拥堵阶段,影响该阶段的最大因素是最小安全距离,根据前面设定的最小安全距离值,在正常与小雪天气时,下降相对平缓,中雪与大雪则非常迅速。
3.3 低能见度模型数值模拟
一般影响能见度的天气主要是由于雾引起,因此本文用小雾、中雾、大雾来表示高能见度、中能见度、低能见度。能见度影响驾驶者视线,本文中,对于该模型的参数设置,结合降雨与降雪模型,对其进行折中,在小雾情况下,参数设置与小雨情况一致,大雾情况与大雨一致,而中雾情况下则与中雪一致。不同能见度下的交通流参数关系如图3 所示。
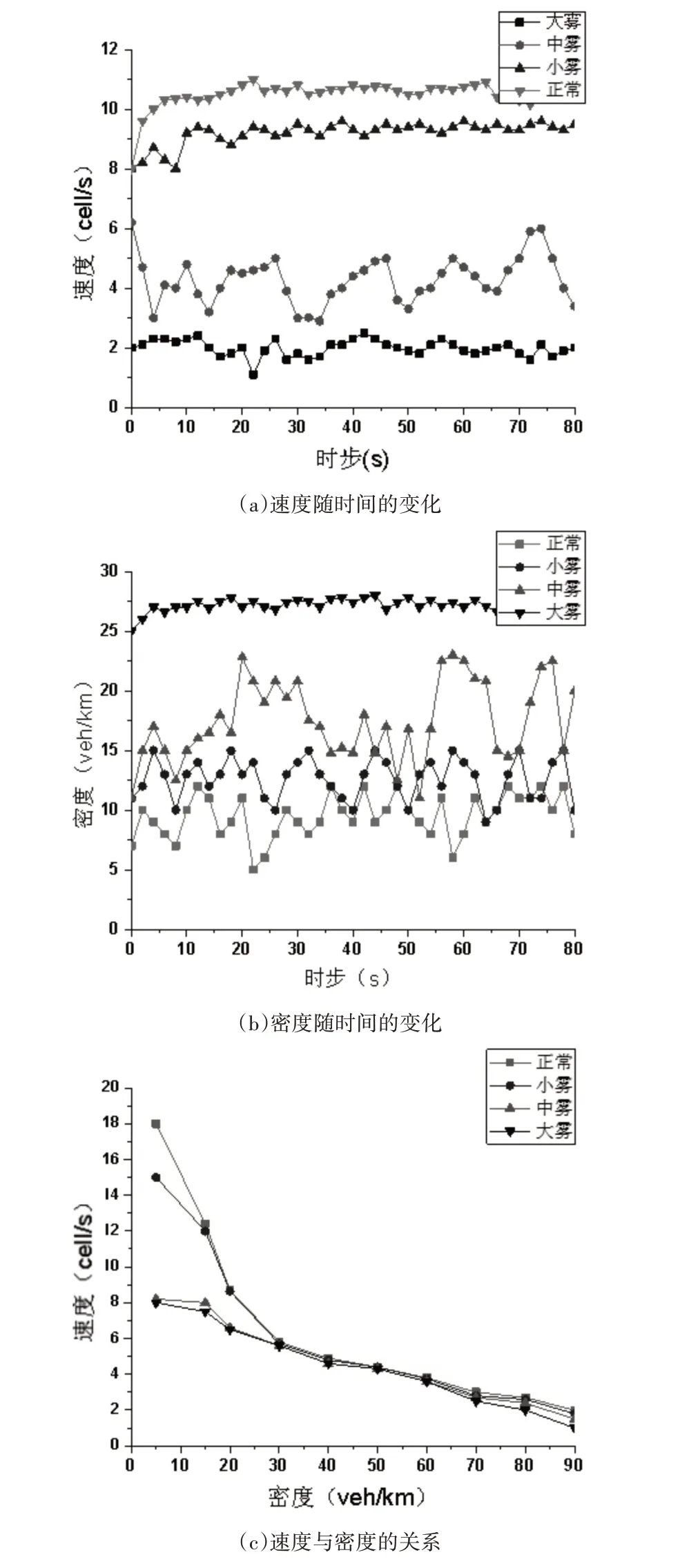
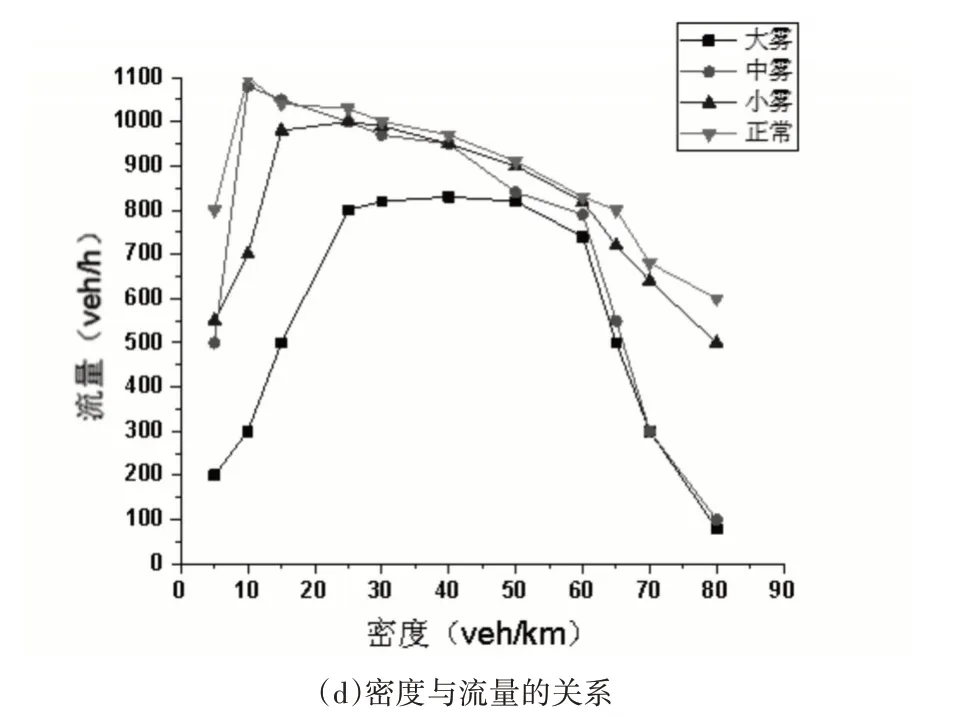
图3 不同能见度下的交通流参数关系
随着能见度的降低,行车速度不断降低,波动性相对较小,在中雾情况下,由于可视距离的原因,会发生频繁的减速加速行为,因此相对波动较大一些,由于能见度问题,导致整个交通流密度较大,由于行驶速度都相对降低,因此造成密度增加,尤其是在大雾情况下,行驶速度更为缓慢,造成车流量增加。整体的交通流特性与降雪、降雨基本一致。在此就不再做特殊说明。
4 结语
本文采用单车道元胞自动机模型研究不同气象条件对城市道路交通流的影响。通过细化元胞尺寸体现车速及位置的微小更新,同时引入气象条件速度因子和气象条件间距因子,分别用于描述不同气象条件下的最大期望速度和最小安全间距。通过仿真模拟,获取不同天气情况下的速度、密度随时间的变化曲线及流量—密度基本图。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
东南大学学报(自然科学版)(2022年3期)2022-06-19
沈阳理工大学学报(2021年6期)2021-12-30
现代农业科技(2019年5期)2019-09-05
科技创新与应用(2018年11期)2018-04-25
农业与技术(2017年13期)2017-08-23
安徽农业科学(2016年4期)2016-10-21
科学启蒙(2009年12期)2009-12-15
现代电子技术(2009年15期)2009-09-30
现代农业科技(2009年19期)2009-03-20
