无人机气压弹射起飞动力学仿真分析
2020-12-23 02:15李德庚周明黄迟陈建龙汪强
机械工程师 2020年12期
李德庚, 周明, 黄迟, 陈建龙, 汪强
(1.西安爱生无人机技术有限公司,西安710065;2.西北工业大学,西安710072)
0 引 言
如今,军事科技发展迅速,无人机已成为各国信息化军事装备中不可或缺的一员,并承担越来越重要的作用。作为无人机系统的一个重要组成单元,弹射系统逐步发展成为一个不受场地条件限制,有着良好适应性的武器装备。而在众多种类弹射方式中,气压弹射又有着诸多优点:不会产生光、声和电信号,有很好的隐蔽性,适应性强,机动性能良好[1]。 但现有的气压弹射装置同样存在缺陷,如某些弹射架质量、体积较大,运输困难,安装操作繁琐,弹射瞬间过载较大,且加速度存在波动,很容易对机身结构和内部电子设备造成损伤。
针对现有气压弹射装置的缺陷,本文对一种直线型导轨气压弹射装置进行研究,建立发射过程的动力学模型,找出影响无人机加速度和发射速度的关键因素,分析其发射过程的动力学特性,为后续弹射系统的研制及结构优化提供参考[2]。
1 动力学模型建立
1.1 弹射系统的简化模型及原理
无人机气压弹射装置简化模型如图1所示。先把滑车后拉至初始位置,并插入安全销;空气压缩机开始给储气瓶充气,气缸安装在导轨内部,气缸内活塞受力向后并对钢丝绳产生预紧力。达到预定气压值后,停止充气,去除安全销,打开释放机构,释放滑车。此时,高压气体迅速充满活塞左侧腔体,由于压缩空气的作用面积增大,使活塞受力突然增大,活塞在很大的压力作用下迅速加速,活塞右腔与大气相通,几乎没有排气阻力,活塞运行到终点时撞击缓冲垫,停止工作。由于钢丝绳上的拉力及导轨与水平面存在一定的夹角,钢丝绳沿导轨向前的分力和螺旋桨的推力共同作用带动滑车和无人机向前加速运动。当上滑车达到最大速度并撞击缓冲装置开始减速时,无人机由于自身惯性和螺旋桨的推力,脱离滑车继续前进,完成发射。

图1 弹射系统简图
1.2 动力学分析
无人机和滑行小车在加速运动过程中,受到绳的牵引力、滑轨表面摩擦力及支撑力、空气阻力、自身重力和发动机推力等作用,如图2所示。
图2中:G为滑车和无人机的总重力;FS为滑车和无人机所受的摩擦阻力;D为无人机所受的空气阻力;E为发动机的推力;φ为发动机推力和飞机纵轴线之间的夹角;F为滑车和无人机所受的牵引力;θ为发射角;l为滑车和无人机在导轨上的位移。
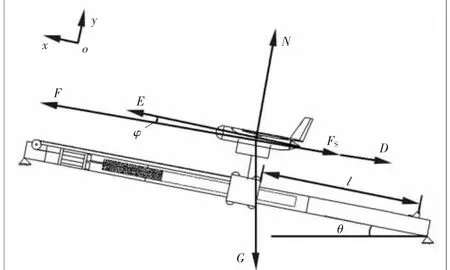
图2 弹射过程中无人机受力分析
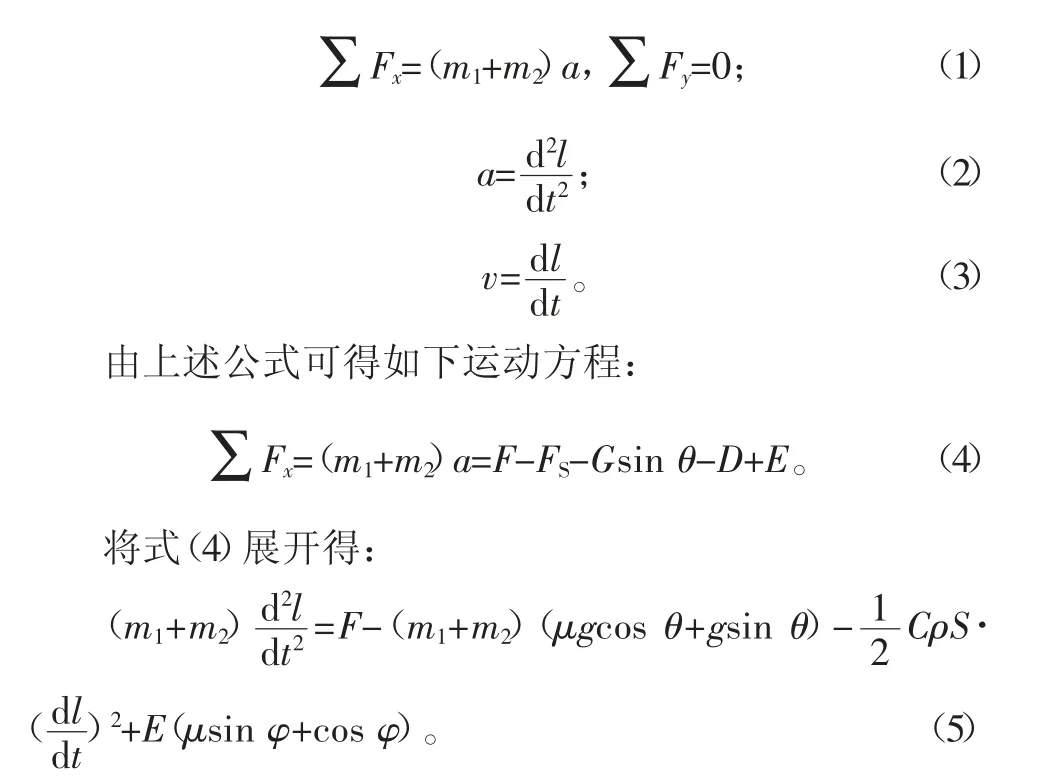
式中:m1和m2分别为滑车和无人机质量;F为滑车和无人机所受的牵引力;μ为动摩擦因数;θ为发射角;C为空气阻力系数;ρ为空气密度;S为无人机迎风面积;l为滑车和无人机在导轨上的位移。
对于气压作动系统,它是发射装置的动力源,为无人机的发射提供动力。气压作动筒压缩空气,推动活塞做功,将内能转化为动能,在极短的时间内将无人机加速到指定速度。此时,可视为气缸内的气体在短时间内来不及与外界进行热交换,这一绝热过程可通过P、V描述为[3]

2 仿真分析
2.1 关键参数对发射速度的影响
根据式(1)~式(9),假定发动机推力沿着机身纵轴线方向,计算不同参数下无人机运动速度-时间线图。在滑车质量一定的情况下,选定P0、θ、V0和d为控制参数[4],以P0=2.0 MPa、θ=11°、V0=80 L、d=80 mm为初始参考工况,针对这4个参数,在一定范围内分别再选取其余两组数据,通过控制变量法,分别研究某一指定参数的改变对无人机发射过程的影响。
如图3~图6所示,分别代表了不同的P0、θ、V0和d下的无人机速度-时间线图(其中实线所对应的参数是最初选定的初始参考数据)。假设导轨足够长,对无人机加速过程进行研究。从计算结果可以得出以下几点结论:

图3 不同P0对应的v-t仿真曲线

图4 不同θ对应的v-t仿真曲线
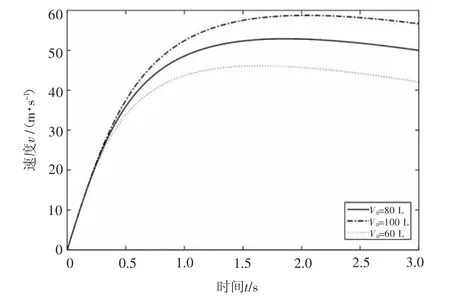
图5 不同V0对应的v-t仿真曲线
由图3我们可以看出,随着充气压力P0的增大,无人机速度也随之增大,且加速度也相应增大,在充气压力为2.0 MPa时,无人机在2 s内可加速到峰值,然后由于气压逐渐变小,速度也开始缓慢下降。与充气压力1.8 MPa相比,速度峰值增大了约15%。

图6 不同d对应的v-t仿真曲线
由图4和图5我们可以看出,在0.5 s这个时段内,两个图中3条曲线几乎重合。然后,图5的3条曲线开始分离,分别加速到各自的速度峰值。而图4的3条曲线几乎全程重合。两个图中,随着参数的改变,速度峰值的最大值比最小值分别提高了约1.6%和30%。由此看出,发射角和储气瓶容积这两个参数对无人机前半段加速过程影响很小,而后者对发射后段的影响较大。但总的趋势是,发射角越小,储气瓶容积越大,无人机和滑车加速持续时间更长,所能达到的速度峰值越大。
活塞直径对无人机和滑车在前半段的加速过程影响显著,活塞直径变大,则活塞有效面积增大,加速度随之增大。在0.5 s时,活塞直径90 mm比80 mm时的速度大了约20%。活塞直径增大,速度能提前进入到速度峰值,但此后速度下降较快。活塞直径较小时,加速度小,速度峰值到来得较晚,但三者相比,速度峰值相差极小,活塞直径增加至100 mm,峰值只提高了5%。且活塞直径较小时,速度峰值过后下降速率相对较慢。
综上,数值仿真计算结果表明,在无人机和滑车质量给定时,对无人机发射过程影响显著的参数有充气压力P0和气缸活塞直径d,后者对前半段加速过程影响尤为明显。通过增大充气压力和气缸活塞的直径,能使无人机和滑车在短时间内加速到速度峰值,但同时还要考虑,加速过快是否会导致发射前段加速度超出无人机所能承受的最大纵向过载。在选择气缸时,也要综合考虑和活塞直径及储气瓶容积是否匹配。
2.2 关键参数对纵向过载和起飞速度的影响
由前文所述,充气压力P0和气缸活塞直径d对无人机发射过程影响显著,通过数值计算,观察不同的P0和d对纵向过载和无人机起飞速度的影响。由于实际发射过程极为短暂,发射速度不会达到峰值,截取观察0~0.3 s时间段内的数据进行研究,如图7~图10所示。
由仿真结果可知,在充气压力为2.0 MPa,活塞直径为80 mm时,无人机初始阶段所受的最大纵向过载约为9.7g,且随着充气压力和活塞直径的减小,最大纵向过载显著降低,加速度最大值与最小值分别相差了约23.5%和58%。随着时间推移,加速度也在平稳下降。但提高充气压力和活塞直径可以增大发射起飞速度。

图7 不同P0对应的a-t仿真曲线
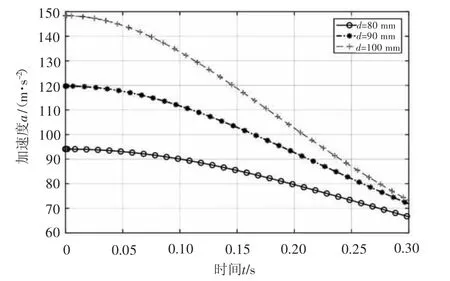
图8 不同d对应的a-t仿真曲线
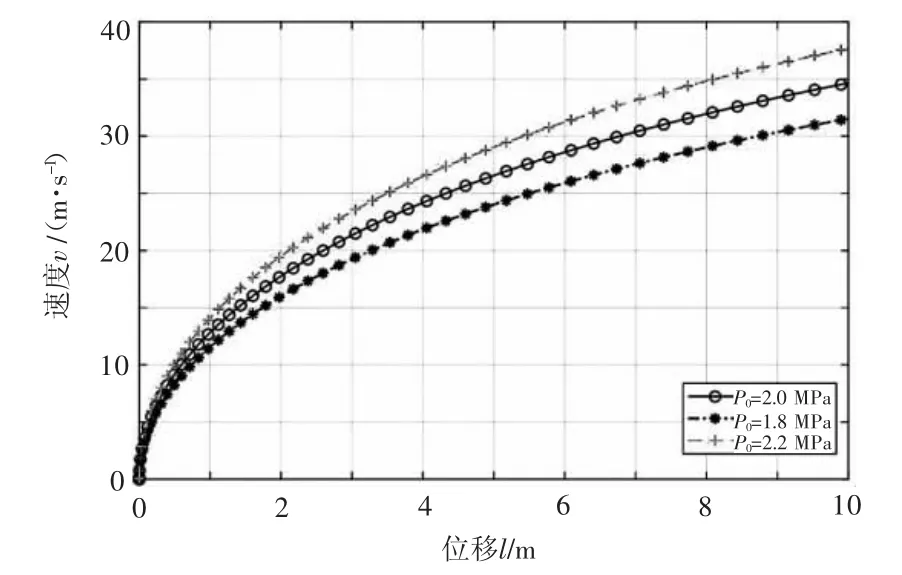
图9 不同P0对应的v-l仿真曲线

图10 不同d对应的v-l仿真曲线
因此,根据上文相关参数对发射过程、纵向过载和发射速度的影响,在选定各项设计参数时,在保证无人机能承受的最大纵向过载的前提下,应该尽可能缩短发射距离,提高发射速度。
2.3 算例
选取无人机和滑车质量m=100 kg,充气压力P0=2.0 MPa,储气瓶容积V0=80 L,气缸活塞直径d=80 mm作为仿真参数。
从仿真结果来看(如图11、图12),无人机和滑车速度从零开始平稳加速,在加速滑行6.2 m后能达到30 m/s的起飞速度,用时0.38 s,最大纵向过载约9.6g。和某楔形气动弹射装置相比[5],直线型导轨最大纵向过载降低,加速度不存在波动,加速平稳,且能有效利用空间尺寸,在短时间内将无人机加速到指定的发射速度。由图13可以看出,可根据需要改变弹射装置发射段长度,以满足不同质量的无人机的发射起飞。

图11 无人机v/l-t仿真曲线

图12 无人机a-t仿真曲线

图13 不同无人机质量下的v-l仿真曲线
为了验证动力学模型的正确性,需要结合试验结果进行对比。如图14显示了不同充气压力下发射速度仿真结果与试验数据的对比,可以看出,仿真与试验数据相近,证明了动力学模型的正确性。考虑到实际情况下定滑轮的摩擦力和气缸作动筒的工作效率等因素,导致试验数据与仿真结果略有偏差(仿真与试验参数一致,m=100 kg,V0=80 L,d=80 mm,l=6.2 m)。

图14 仿真结果与试验结果对比
3 结 论
基于气压弹射装置的弹射原理,建立了无人机发射过程的动力学模型,通过数值仿真计算,对比了不同参数下无人机发射过程的运动特性。从仿真结果来看,在给定无人机和滑车质量时,充气压力和气缸活塞直径对发射加速过程影响显著,发射角和储气瓶容积的改变对发射初始过程影响极小。
直线型气压弹射装置发射过程中,不存在加速度波动,加速平稳,纵向过载较小,减轻了对无人机及内部结构的损伤。并能灵活调节发射段的长度,满足不同质量无人机的弹射需求。
将仿真结果和试验数据进行比对,验证了动力学模型的准确性。本文的研究结果对气压弹射装置的研制设计具有重要的参考价值和工程意义。
猜你喜欢
环球时报(2022-04-28)2022-04-28
幼儿画刊(2021年5期)2021-12-02
军事文摘·科学少年(2021年6期)2021-06-24
智慧少年·故事叮当(2020年6期)2020-06-21
装备制造技术(2020年12期)2020-05-22
建筑机械化(2020年1期)2020-03-19
模具制造(2019年4期)2019-06-24
车迷(2018年11期)2018-08-30
新能源科技(2018年7期)2018-08-02
建材与装饰(2018年7期)2018-03-15