民用飞机控制律对偏航机动载荷影响分析
2021-01-05 11:51阮文斌张智
航空工程进展 2020年6期
阮文斌,张智
(中国商飞上海飞机设计研究院 飞机结构强度工程技术所, 上海 201210)
0 引 言
偏航机动是CCAR25.351[1]、FAR25.351[2]和CS25.351[3]规定的一种侧向机动情况,该条款要求方向舵操纵器件突然移动至方向舵舵偏限制偏度并保持,直到侧滑角达到稳态时再操纵方向舵操纵器件突然回到中立位置。机动过程中由于方向舵快速大幅偏转造成方向舵和垂尾上产生较大气动载荷并传递到后机身,进而导致方向舵、垂尾和后机身等部件成为载荷严重情况之一。
偏航机动是单向蹬舵过程,整个机动过程中不需考虑驾驶员来回往复蹬舵情况。服役经验和调查表明,不论在训练中还是在运营飞行中,驾驶员都可能实施一些错误或对飞行不利的方向舵输入措施,例如脚蹬反向操作。事故和事件资料显示,一些飞机经历了方向舵往复偏转操作,导致机体结构承受了超过限制载荷甚至有时超过极限载荷的作用力。现有的规章无该方面的机动载荷情况考虑,进而导致了多起由于驾驶员来回往复蹬舵造成的安全事故,其中包括2001年美航AA587航班坠毁事故[4]。因此,为保证飞机安全性,欧洲航空安全局(European Aviation Safety Agency,简称EASA)在2018年发布了新条款CS25.353,作为现行CS25.351偏航机动条款的补充。与偏航机动单向蹬舵不同,方向舵往复偏转包含了两次往复蹬舵过程。
CCAR25.351偏航机动和CS25.353方向舵往复偏转条款中都规定了驾驶舱航向操纵位移时间曲线,对于采用机械操纵或助力操纵的飞机,在进行机动载荷计算时,可直接将条款要求的座舱方向舵操纵器件输入规律当作操纵面运动规律使用[5-8]。随着控制律在现代飞机上的大量应用,并且复杂程度也逐步增加,操纵面的偏转规律由简单的驾驶员动作线性变化变为由驾驶员动作和控制律特性共同来确定,进而决定飞机的机动响应。国内,王仲燕[9]从操纵面运动速率和规律两个方面研究了控制律对对称机动载荷的影响;王庆林等[10]将飞机控制律特性用于对称机动载荷计算分析,研究了控制律对机动载荷的影响;李志等[11]研究了采用主动控制技术时,飞机飞行参数对平尾机动载荷的影响;陈惠亮[12]研究了主动控制技术对民用飞机飞行载荷的影响,但并没有给出具体的计算和实践结果;阮文斌等[13]研究了控制律对俯仰机动平尾载荷的影响。从上述研究可知,目前国内在控制律对机动载荷影响的研究工作主要集中在纵向俯仰机动情况,而对横航向机动载荷的影响鲜有报道。
针对上述问题,本文结合运动动力学方程,依据CCAR25.351条款偏航机动情况及CS25.353条款方向舵往复偏转情况的要求,对两种偏航机动情况考虑控制律分别进行机动仿真计算,并对飞机响应运动参数及垂尾载荷计算结果进行分析比较,分析飞机控制律对偏航机动载荷的影响。
1 运动动力学方程
飞机绕质心运动动力学方程主要由三部分组成:动力学方程组、运动学方程组以及其他补充方程组。
1.1 动力学方程组
飞机的动力学方程组由作用在飞机质心上的力及绕质心转动的矩组成,详见式(1)~式(2)。
(1)
(2)

1.2 运动学方程组
飞机的运动学方程组给出了地面坐标轴系中飞机在空间的运动轨迹和姿态变化规律,详见式(3)~式(4)。
(3)
(4)

1.3 补充方程组
除上述动力学方程和运动学方程外,为便于使用,增加了一些常用变量之间的相关转换关系,如式(5)~式(7)所示。
(5)

(6)

(7)
式中:V为飞机速度;α为迎角;β为侧滑角。
在进行偏航机动载荷仿真计算时,首先根据适航条款中规定的方向舵操纵器件操纵规律得到方向舵舵面的偏转规律,在不考虑控制律计算时,方向舵舵面根据脚蹬操纵输入规律线性增加到限制偏度;而考虑控制律计算时,控制律根据方向舵操纵器件操纵位移和飞机响应运动参数反馈共同计算得到方向舵舵偏。然后通过求解上述的运动动力学方程,求出整个偏航机动过程中飞机响应运动参数时间历程,进而利用垂尾部件导数可以得到垂尾载荷,具体过程可详见参考文献[14]。
2 控制律对偏航机动影响分析
偏航机动是CCAR25.351[1]、FAR25.351[2]和CS25.351[3]规定的一种侧向机动情况,方向舵操纵器件操纵位移要求如图1所示,具体要求详见CCAR25.351[1]及参考文献[15]。

图1 偏航机动方向舵操纵器件操纵示意图[15]
按照CCAR25.351偏航机动条款要求,机动载荷计算初始状态为法向过载系数1的定常飞行,此时突然偏转方向舵操纵器件到最大限制偏度并保持使飞机偏航至过漂侧滑角,飞机将达到过漂侧滑角并随后会达到静平衡状态,此时操纵方向舵操纵器使得方向舵突然回到中立位置,如图2所示。在此过程中需考虑飞机的刚体瞬时响应过程以及实际的控制律反馈。

图2 方向舵往复偏转方向舵操纵器件操纵示意图[15]
在不考虑控制律的偏航机动载荷计算时,直接将CCAR25.351偏航机动条款要求的座舱方向舵操纵器件输入规律当作方向舵舵面运动规律使用;而考虑了控制律的偏航机动载荷计算时,方向舵舵偏根据飞机响应运动参数、脚蹬位移反馈计算得到,再进行飞行运动动力学方程仿真求解,得到整个飞机偏航机动响应时间历程。
根据上述偏航机动条款要求,采用运动动力学方程,以某型民用飞机原始数据为基础,对是否考虑控制律的偏航机动分别进行仿真计算。
典型工况下是否考虑控制律进行偏航机动仿真得到的飞机响应运动参数及垂尾载荷对比曲线如图3所示。

(a) 脚蹬位移对比曲线

(b) 方向舵偏度对比曲线

(c) 侧滑角对比曲线

(d) 偏航角速度对比曲线

(e) 偏航角加速度对比曲线

(f) 垂尾载荷对比曲线
从图3可以看出:方向舵操纵器件位移相同的情况下,考虑控制律后由于偏航阻尼器的作用,在偏航角速度较大时,方向舵舵面偏度有所减小,导致飞机所能达到的最大过漂侧滑角也有所减小,进而导致垂尾载荷最大值有所下降。
3 控制律对方向舵往复偏转影响分析
方向舵往复偏转是CS25.353规定的一种新的侧向机动情况,以作为CS25.351偏航机动条款的补充。方向舵操纵器件操纵位移要求如图2所示,具体要求可详见参考文献[3,15]。
CS25.353与CS25.351偏航机动条款区别有三点:①方向舵往复偏转产生的载荷情况视为极限载荷,无需采用额外的安全系数;②与偏航机动单向蹬舵不同,方向舵往复偏转包含了两次往复蹬舵过程;③方向舵往复偏转回舵时刻为最大过漂侧滑角时刻。
依据CS25.353条款对方向舵往复偏转规定的要求,以某型民用飞机原始数据为基础,对典型工况下考虑控制律的方向舵往复偏转进行仿真计算,并与偏航机动仿真结果[15]进行对比。两种偏航机动仿真得到的飞机响应运动参数及垂尾载荷对比曲线如图4所示,可以看出:考虑方向舵往复偏转后,由于方向舵突然反向偏转至最大偏度时,侧滑角贡献的垂尾载荷与方向舵偏度贡献的垂尾载荷叠加,导致垂尾载荷急剧增加;由于往复蹬舵,侧滑角会发散增加,导致垂尾载荷也会发散增加。

(a) 脚蹬位移对比曲线

(b) 方向舵偏度对比曲线

(c) 侧滑角对比曲线

(d) 偏航角速度对比曲线

(e) 偏航角加速度对比曲线

(f) 垂尾载荷对比曲线
针对上述问题,采取控制律优化措施对方向舵往复偏转引起的垂尾载荷增加进行限制。本文采用国内流行的P-Rudder控制律,脚蹬位移对应一个固定的方向舵偏度,具有偏航阻尼功能,在偏航角速度较大时能有效降低飞机垂尾载荷。但从图4也可以看出:考虑控制律对于方向舵往复偏转垂尾载荷抑制并不是很有效。为此,对控制律架构进行调整,采用国际上新提出的P-Beta控制律,该控制律脚蹬位移不再对应一个固定的方向舵偏度,而是对应一个侧滑角,控制律通过比较当前的脚蹬侧滑角指令和真实的侧滑角响应后,计算所需的方向舵偏度。
考虑两种控制律后,方向舵往复偏转机动仿真得到的飞机响应运动参数及垂尾载荷对比曲线如图5所示。
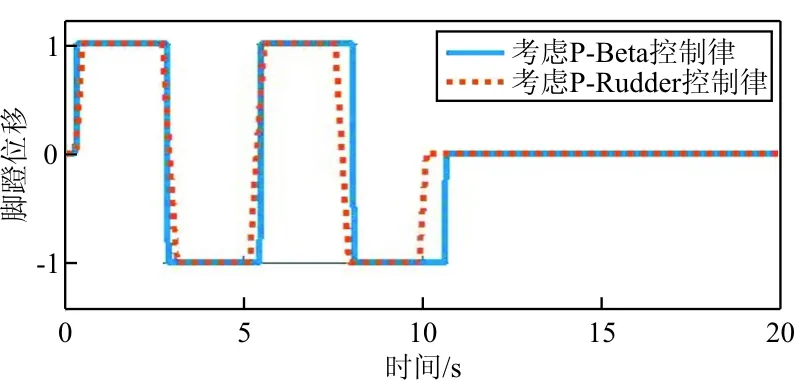
(a) 脚蹬位移对比曲线

(b) 方向舵偏度对比曲线

(c) 侧滑角对比曲线

(d) 偏航角速度对比曲线

(e) 偏航角加速度对比曲线

(f) 垂尾载荷对比曲线
从图5可以看出:考虑P-Beta控制律后,由于脚蹬位移直接对应侧滑角,过漂侧滑角有所减小,此外侧滑角并没有因为方向舵往复偏转而发散增加,进而有效降低了垂尾载荷。
4 结 论
(1) 对于急剧移动操作器件的偏航机动,考虑控制律后,由于偏航阻尼作用到飞机的响应有所缓减,导致垂尾载荷有所降低。
(2) 对于CS25.353规定的方向舵往复偏转情况,由于侧滑角和方向舵偏度贡献的垂尾载荷叠加导致垂尾载荷大幅增加,传统P-Rudder控制律对于方向舵往复偏转垂尾载荷抑制并不是很有效,需采用P-Beta控制律降低方向舵往复偏转的垂尾载荷。
猜你喜欢
水上消防(2022年2期)2022-07-22
兰州交通大学学报(2022年2期)2022-04-26
考试与评价·高二版(2021年1期)2021-09-10
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
考试与评价·高一版(2020年2期)2020-10-29
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
电子世界(2004年4期)2004-07-26
电子世界(2004年5期)2004-07-26