
全船自动化典型解决方案解析
2021-01-05 03:18吴炎彪
造船技术 2020年6期
王 芳, 吴炎彪, 王 剑
(1.杭州电子科技大学 机械工程学院, 浙江 杭州 310018;2.哈尔滨工程大学 水下机器人技术重点实验室, 黑龙江 哈尔滨 150001;3.浙江大学 建筑工程学院, 浙江 杭州 310058;4.浙江源创建筑智能科技有限公司, 浙江 杭州 310053;5.浙江大学 电气工程学院, 浙江 杭州 310027)
0 引 言
船舶与海洋工程装备的研究开发必须通过质量管理(ISO9000系列)、海上人命安全、船舶操作安全、防污染与船舶入级等一系列标准、公约和规范[1-2]。同时在性能上,电气、电子设备的系统设计、性能指标、安装要求、电磁兼容性能测试方法与等级划分等方面[3-5]还须符合国际电工委员会(International Electrotechnical Commission, IEC)的标准与依据。因而,高附加值船舶与海洋工程配套设备的面世,对国内企业的研发投入、水平及经营管理都提出较高的要求。

1 全船综合自动化技术分析
“海洋石油981”深水钻井平台上配套的综合自动化系统(Integrated Automation System, IAS)如图1所示,对其解决方案的技术特点进行分析。
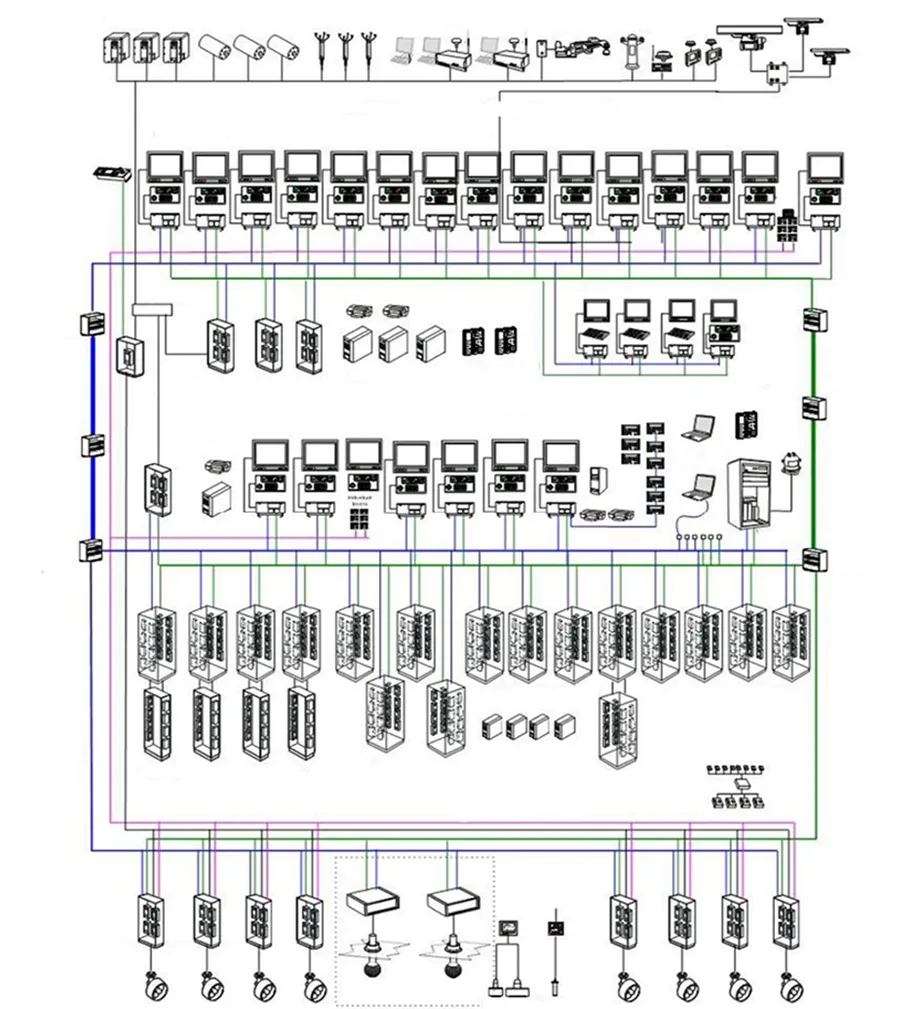
图1 “海洋石油981”钻井平台上配套的IAS
1.1 齐全的系统级产品
IAS涵盖对平台自身的运动控制及对平台上的生产设施系统、动力系统、仪表控制系统、生产辅助系统、公用系统、消防系统等设备进行监测、控制、保护、报警等,已形成集机舱监控报警、电站管理、辅机监控、航行自动化等于一体的船舶综合管理系统。
1.2 标准化、模块化、系列化的开放式体系结构
出于安全性与安装、操作方便的考虑,船舶IAS的结构一般采取分散控制、集中操作与集中管理的设计原则。由图1可见:各个子系统在硬件组成上一般由标准化的操作站(Operator Station, OS)、分布式处理单元(Distributed Processing Unit, DPU)/分布式控制器(Distributed Controller, DC)、现场信号采集模块及与其连接的通信网络组成。
按照相关船级社的规范要求,OS会分别布置在桥楼/中央控制室、机舱控制室、货舱控制室等,同时各类辅助显示屏须安装在船舶的各主要部位,所有OS与显示屏并行工作。综合自动化解决方案中的每个子控制系统都具有相应的OS,提供人机交互界面(Human Machine Interface, HMI)供操作人员下达操作指令。只要有合法的用户权限就可以通过任一操作台或就地显示屏进入船舶IAS中的任一子系统。OS的操作系统采用基于Windows XP的应用控制环境、500 ms基本控制执行环境,具备对象连接与嵌入(Object Linking and Embedding, OLE)的过程控制(OLE for Process Control, OPC)标准的集成数据访问,使不同供应厂商的设备和应用程序之间的软件接口标准化,使全船数据交换更加简单化。OS具备良好的图形用户界面(Graphical User Interface, GUI)与HMI,方便用户及时下达操作指令并实时监控船舶的运行状态。动力定位控制系统(Dynamic Positioning Control System, DPCS)中OS的GUI和HMI如图2和图3所示。船舶监测与综合控制系统(Ship Monitoring and Integrated Control System, SMICS)中OS的GUI如图4所示,包括流程图、列表图、趋势图、事件列表图、系统配置图、PDF视图、系统导航索引图等,以满足不同子系统的监控要求。

图2 DPCS中OS的GUI

图3 DPCS中OS的HMI

图4 SMICS中OS的GUI
DPU/DC是整个IAS的计算中心,分布于船舶的各个控制现场,实现各类报警、控制、安全等实时任务。DPU的中央处理器(Central Processing Unit, CPU)模块、动力模块、通信模块和数据通信总线均采用1∶1热备份冗余,可以自动实现冗余控制器之间的切换,当然用户也可以手动进行切换。冗余控制模块可以相互诊断其对应的冗余控制器系统中的设备是否发生故障,某一控制器发生故障将不会影响其余冗余配置的控制器,以保证整个控制系统的正常进行。康士伯公司提供多个不同类型的DPU模块,以适应控制现场的不同输入/输出(Input/ Output, I/O)点的需求与应用情况。同时,在I/O点分布较为集中的位置设置现场信号采集箱。
1.3 可靠的网络体系
船舶IAS的网络架构是一个多层次的网络结构体系,根据不同的应用需求可将其分为信息管理层、实时控制层与现场设备层,3层分别采用不同的网络协议。“海洋石油981”深水钻井平台上,信息管理层利用双重冗余的工业局域网(Local Area Network, LAN)实现各类OS、工程师站、数据服务器及显示终端设备间的通信;实时控制层采用冗余控制器局域网络(Controller Area Network, CAN)总线实现OS与DPU之间的通信。为了保证网络的整体安全性与可靠性,在终端与终端之间设置网络分配单元(Network Distribution Unit, NDU)进行网络系统的扩展,同时也可实现故障隔离。DPU与第三方设备或系统的通信一般通过串口通信协议(Serial Communication Protocol, SCP)。对于某些特殊系统,如DPCS,主DPCS与备用DPCS通过冗余光纤连成网络,达到信息共享。
除了可靠的产品质量,由于康士伯公司所配套的大型船舶主要在无限航区航行,因此建立完善的全球售后网络服务体系是提高产品服务质量、赢得品牌信任的又一营销手段。
2 子系统分析
康士伯公司的全船IAS主要包括DPCS、推进器控制系统(Thruster Control System, TCS)、综合导航控制系统(Integrated Navigation Control System, INCS)、SMICS、综合安全控制系统(Integrated Safety Control System, ISCS)等。
2.1 DPCS + TCS
动力定位系统(Dynamic Positioning System, DPS)的功能是仅使用船上推进器系统的推力来保持船舶与海洋平台在海上的位置或预先确定的航迹。近年来,随着石油与天然气的开发不断向深海区域拓展,DPS的需求逐年上升,逐渐取代传统的锚泊定位方式,动力定位(Dynamic Positioning, DP)将成为各类海洋结构物进行深海作业的唯一选择。国际海事组织(International Maritime Organization, IMO)与中国船级社(China Classification Society, CCS)、挪威船级社(Det Norske Veritas, DNV)、美国船级社(American Bureau of Shipping, ABS)等各大船级社在相关规范中提出要求:DPS不仅须具备自动控制方式,而且须具备一套独立的操纵杆控制系统,同时须使用单独的控制器来实现对各个推进器的手动控制(起动、停车、方向与螺距控制等)。为此,康士伯公司的DPCS还包括一套独立的联合操纵杆(CJoy)控制系统,同时TCS与DPCS一起进行销售。由于康士伯公司的DPCS基于相同的软硬件平台,采取模块化的设计,因此根据IMO与各大船级社对DPS的不同等级/附加标志要求,DPCS中DP可以灵活进行配置与扩展,升级至附加标志等级较高的系统,如表1所示。

表1 DPCS中DP的等级/附加标志
2.2 INCS
INCS的主要特点是具有完善的综合导航、自动操船、自动避碰、通信和航行管理、控制自动化等多种功能及丰富的图形界面,从而实现船舶航行的高度自动化,提高航行的安全性与经济性[5]。从OS的布局来看,康士伯公司的INCS一般包括自动雷达标绘仪(Automatic Radar Plotting Aid, ARPA)、电子海图显示与信息系统(Electronic Chart Display and Information System, ECDIS)、桥楼航行值班报警系统(Bridge Navigational Watch Alarm System, BNWAS)、驾驶指挥系统(Conning System, CS)、自动驾驶仪与航迹控制系统(Autopilot and Track Control System, ATCS)。
船舶导航与驾驶自动化技术是具有航海专家数据库及国际通用电子海图技术支持的数字化、智能化、模块化和集成化的综合导航与驾驶控制的网络系统[5]。国外先进的自动化生产商已研制推出第3代、第4代的INCS,未来将进一步融合航海专家数据库技术、通用型ECDIS技术、多导航传感器的信息融合处理技术、基于多任务实时操作系统的系统集成技术、系统导航功能模块化技术等,实现智能驾驶。
2.3 SMICS
SMICS是集机舱动力系统及其辅助系统的自动控制、监测、报警等于一体的监控系统,保障机舱、货物系统及其辅助设备的安全与有效运行,包括动力管理系统(Power Management System, PMS)、报警与监测系统(Alarm and Monitoring System, AMS)、辅助机械控制系统(Auxiliary Machinery Control System, AMCS)、压载自动化系统(Ballast Automation System, BAS)、装载与稳定管理系统(Load and Stability Management System, LSMS)、货物监控系统(Cargo Control and Monitoring System, CCMS)等。
康士伯公司的SMICS采用标准化、模块化的设计,将机舱的各个子系统进行有效集成,可以根据船舶的不同类型及船舶的不同应用需求灵活地进行配置。目前国内部分船舶配套企业已有各自的机舱子系统面世,但还没有一家企业推出集机舱、货物、动力等管理于一体的SMICS,同时国产设备在成熟度、工艺、性能等方面都与国外产品有较大差距,尚未形成全球服务体系,因而在大型民船上的装船率很低。
2.4 ISCS
康士伯公司的ISCS符合IEC 61508标准对系统安全完整性等级(Safety Integrity Level, SIL)的要求,具备SIL 1级、SIL 2级、SIL 3级。ISCS主要包括应急关断系统(Emergency Shutdown System, ESD)、火灾报警与气体检测系统((Fire Alarm and Gas Detector System, FAGDS),简称火气监控系统/火气系统(Fire & Gas System, FGS))、过程关断系统(Process Shutdown System, PSD)及对系统电脑的深层监控等。
ESD一般具备较高的安全等级,通常为SIL 2级或SIL 3级,控制器严格按照船上所设定的应急因果逻辑图实施控制,输出各相应级别的关断信号控制现场控制盘或控制设备,产生各相应级别的应急关断,某一级别关断不能引起较高级别的关断,只能启动本级和所有较低级别的关断。PSD在功能上与ESD类似,只是对船上的生产流程实施不同级别的关断,但在系统的安全等级上偏低,一般为SIL 1级或SIL 2级。
FGS的主要功能是及时、准确地探测到可能或已经发生的可燃气体泄漏事故和火情,并能对意外危险火源进行报警。在危险情况下,可以通过手动和自动两种方式启动船上的消防系统,以保护船上人员和设施的安全。FGS主要由监控系统、现场火气探测设备和报警设备等组成。现场火气探测与报警设备包括火焰探测器、热探测器、烟探测器、可燃气体探测器、手动报警站、手动二氧化碳释放站、蜂鸣报警器、各类状态灯等,应根据船上现场生产设备的特点合理进行布置。根据风险分析的结果,FGS的安全等级可以为SIL 1级或SIL 2级,也可以没有SIL等级。
3 结 语
虽然我国在造船总量、造船效率等方面已经上升到一个新的高度,但船舶配套工业水平与船舶工业整体效益与世界先进造船国家相比还存在较大差距,特别表现在高附加值、高技术含量的装船设备方面。船舶配套设备如果长期不能立足于国内,势必对我国的造船业带来深远的不良影响。应充分认识到提高船用设备国产化率对振兴我国船舶工业的重要意义,只有不断提高船用设备的国产化率与装船率,才能使我国的造船业得到健康、长久、稳定的发展。
国内的船舶配套企业应加大研发投入与研发力量,吸收与借鉴国外著名产品的技术,真正抓好船舶配套产品的质量与性能,这是提高船用设备国产化率的基础和前提。同时,在性能与国外产品相匹敌的基础上,更应重视降低产品成本的工作。当然,提高船用设备国产化率也离不开船舶设计院、船厂的共同努力和支持。应鼓励国内各船厂、船舶设计院(所)与船舶配套企业密切合作,共同为提高船用设备国产化率作出贡献。最后,需要采取必要和适当的调控政策,包括严格执行许可证制造技术合同(如船用低速柴油机)有关销售地区条款规定,严格执行《国内投资项目不予免税的进口商品目录》,制订船舶行业装船国产设备推荐产品目录,加强船用设备进口管理工作和必要的税收调节政策等。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
船舶(2021年4期)2021-09-07
小哥白尼(趣味科学)(2019年10期)2020-01-18
电子制作(2019年13期)2020-01-14
船舶标准化工程师(2019年4期)2019-07-24
中国船检(2017年3期)2017-05-18
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
