一种可重构模块化无人车设计
2021-01-05 17:57孙明林志彦严浩东石浩枫
科技风 2021年35期
孙明 林志彦 严浩东 石浩枫


摘 要:为使机器人能够更好地适应不同的任务需要,研制了一种模块化可重构机器人,设计了机器人基础模块,并进行了承载力的有限元分析,有针对性地对控制系统进行了设计和改进,提升了机器人运行的平滑性,减少了磨损。实验表明,该机器人可代替传统的无人车,执行多种功能,提高了任务适用性,降低了使用成本和维护成本。
关键词:可重构;模块化;机器人
1 绪论
传统机器人多为满足特定场景、特定条件而被设计成不可更改的结构形式,虽然能较好地完成当前应用背景的任务,但这种对环境的极高适应度也导致其通用性降低,难以满足使用者不断变化的需求。随着信息产业的进步和国家大力推进工业4.0,用户对于产品个性化的需求不断增加,工业产品呈现出小批量、定制化的趋势。可重构模块化机器人MRRS(Modular reconfigurable robot system)具有灵活改变构型以适应不同的任务需求的特点,能够更好地满足新产业背景下柔性生产的要求和多用途环境下不同任务需求,能够为企业节约设备成本,缩短生产周期,提高产品迭代率,近年一直是機器人领域重要的研究方向。
2 国内外研究综述
可重构模块化机器人与传统机器人具有以下特征:一是可重构机器人的控制、驱动电路能嵌入各关节模块中,使得每个模块具有自治性,集驱动、控制、通信于一体;二是机器人构型的多样性和模块的独立性为可重构机器人实现分布式控制提供了必要条件,可有效地提高系统应用的效率和方便性。
美国卡内基梅隆大学[1](1988)较早对可重构模块化机器人系统开展了研究,但由于当时技术条件的限制,存在自重较大、构型变化较少的问题;德国宇航中心通过关节的模块化设计,研发了轻质化的LWR-II机器人[2];德国SCHUNK公司的PowerCube系列模块化机器人[3]实现了较为成功的商业化,并在不断迭代改进当中。国内的科研机构和学者对于模块化结构的理论研究和应用做了相关的研究,将机器人的可重构单元分为辅助单元、旋转单元和摆动单元三种类型,利用组合数学理论分析了其装配特性(郑浩军、王劲松、李铁民[4],2003)。利用拉格朗日方程对可重构机器人进行动力学分析,验证了可重构机器人结构的合理性(王卫忠[5],2007)。国内外对于可重构模块化机器人的研究大多集中于机械手类型的机器人,无人车的研究和应用较少,多数研究集中于军事领域,如爱沙尼亚Milrem公司研发的模块化混合动力无人车THEMIS[6],通过更换任务模块,可执行多种任务。
3 可重构无人车结构设计
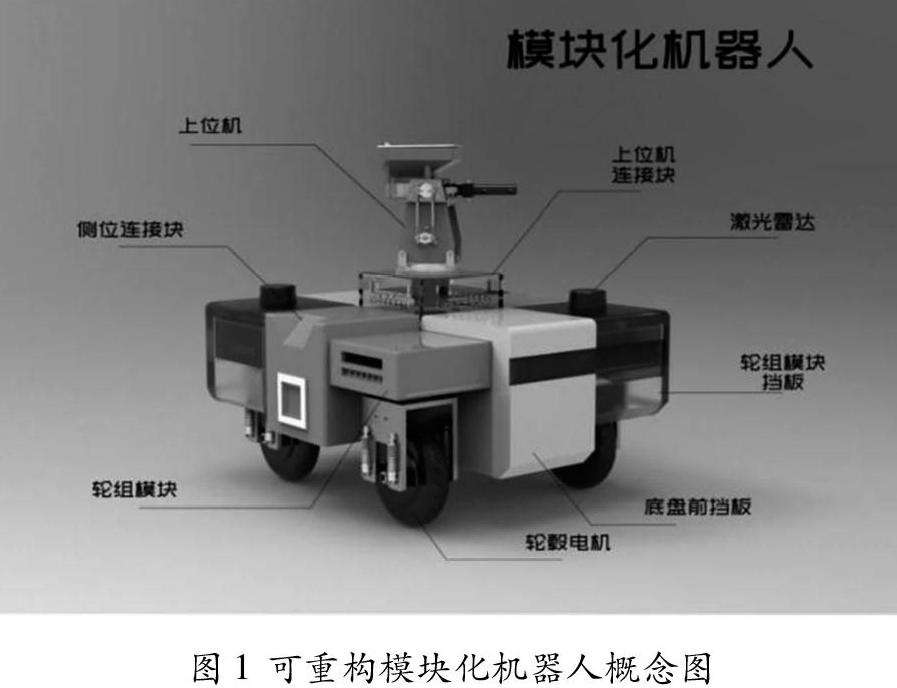
在无人车的研发和应用中,综合应用可重构模块化技术,将大大提升机器人的环境及功能适应性,降低各项成本,快速形成车族化、连续迭代的产品体系。本文设计的可重构模块化机器人(图1)主要由机械结构和控制系统两部分组成,机器人通过模块之间的机械连接,方便快捷的构建出不通用途的功能性机器人,控制系统通过自检识别出当前的系统构型,有针对性地对机器人进行监控和控制。
3.1 单元模块结构设计
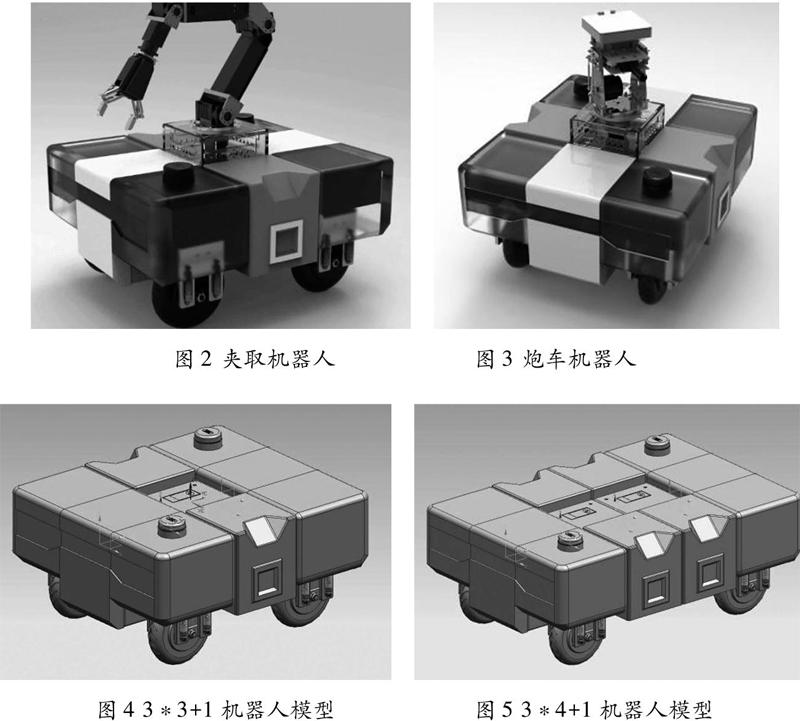
机器人的由若干个结构相似、相对独立的基本模块单元连接而成,每个模块都具有一定的功能,模块与模块之间可以实现快速连接和分离。可重构模块化机器人构型可以任意变换,功能可根据任务需求进行配置,进行夹取、射击等相应的动作。图2展示了极端环境中,机器人装上机械臂成为夹取机器人;图3展示了在射击比赛中,机器人装上炮台成为具有射击能力的炮车机器人。此外,根据身处环境的不同,也可以对机器人底盘进行扩大或者缩小。
机器人的每个单元模块具有独立的功能,连接的单元模块越多,机器人体积越大,功能越复杂。图4展示了由10个不同模块组成的3*3+1机器人模型,这种结构下的机器人占地面积最小,结构最紧凑,适合用于执行一些工作空间相对较小的任务;图5展示了由13个不同模块组成的3*4+1机器人模型,相对于前者来说,这种构型功能更复杂,可以加装各种任务所需的传感器,功能更全面。
基本单位模块是可重构模块机器人的结构和操作产生的基础。一个模块需要实现快速的连接和分离。同时,模块之间的连接不得发生干涉。为了实现上述重构变种,基本单位的结构设计应满足以下特性:
(1)良好的重构性与兼容性,各模块的结构设计相同;
(2)结构紧凑、小体积及轻量化;
(3)高效可靠的连接分离;
(4)电力系统的动态、可靠的连接。
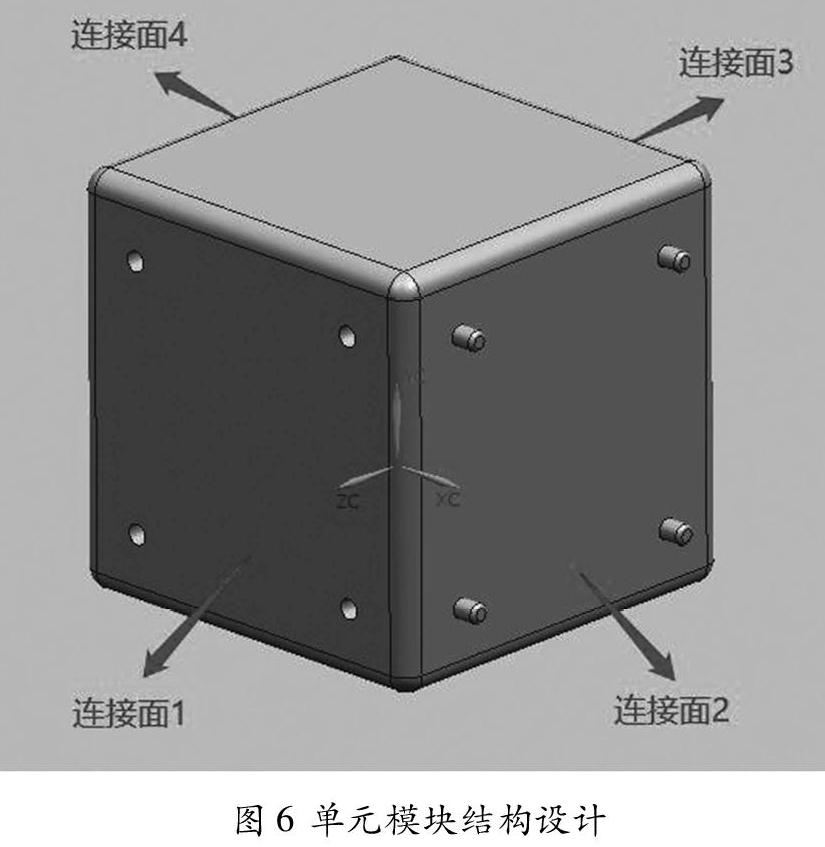
为了满足上述单元模块结构设计上的基本要求,提出了一种正方体的基本单元模块,正方体的四个侧面为连接平面,每个连接平面上有4个圆柱形铷磁铁,可以让两个单元模块之间呈0°、90°、180°、270°连接,当两个单元模块相互靠近时,利用磁力吸附来实现并维持连接状态,磁力的对中性可以在实现快速连接的同时保证自动对准。此外,虽然磁性连接在磁铁柱轴向具有很强的连接能力,但是对连接面径向的载荷承受能力较弱。如图6所示,为了避免磁力连接因收到径向分力而断开,将连接面1、连接面3上安装铷磁铁的圆柱孔位加深,同时增大连接面2、连接面4上的铷磁铁柱的高度,从而增加两者的有效接触长度。利用类似长轴(铷磁铁柱)与深孔(连接孔)的配合来承受模块单元之间的弯矩,提高连接的可靠性。
运动模块。由于可重构模块化机器人经常用于代替人工前往极端环境执行任务,因此在机器人执行任务过程中,经常受到时间、空间等条件的限制,导致机器人无法及时、高效地执行任务指令。因此,应尽量提高机器人在狭小空间内横向移动、纵向移动、斜向移动和旋转的能力。且因机器人的单元模块较小,应尽量减小运动模块的体积。此外,为了方便单一运动模块进行检修,应尽量简化运动模块的整体结构,做到每个运动模块的驱动力矩独立可控,转矩转速易于测得。
综上所述,运动模块是可重构模块化机器人实现空间位置移动的核心模块之一,不仅要做到精确、高效的移动,同时四个运动模块之间不能相互干扰,因此,运动模块在设计上应满足以下特点:
(1)较高的灵活度,较好的全方位移动的能力;
(2)体积小,比功率大,传动效率高;
(3)稳定性好,控制难度低;
(4)驱动力矩独立可控,转速转矩易测得;
(5)结构简单,维修难度低。
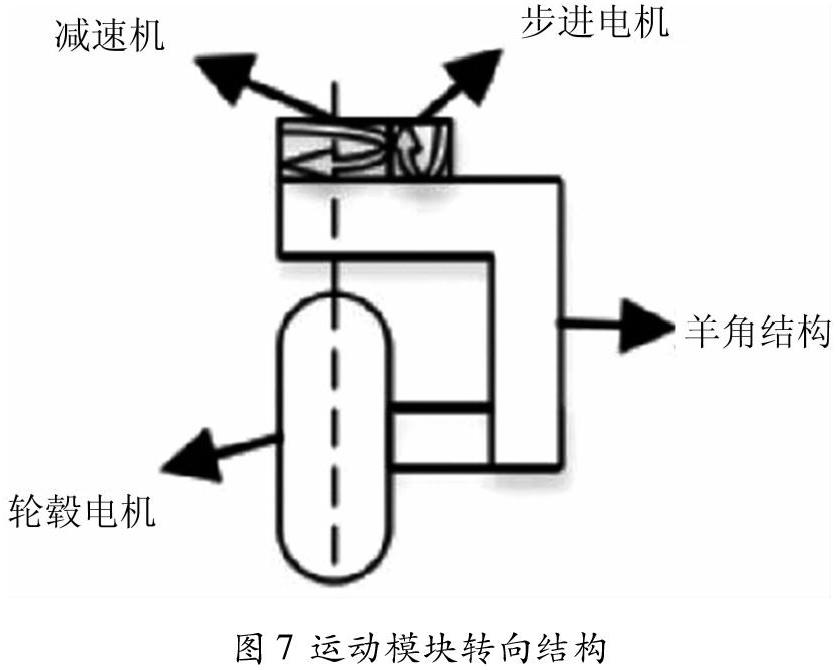
为了满足上述运动模块结构设计上的基本要求,提出了以轮毂电机为核心的四轮独立驱动模型。其中轮毂电机选择直流无刷电机,其具有传统直流电机调速平滑、启动性能优越等特点;同时取消了传统直流电机中易发生磨损的电刷和换向器结构,采用霍尔传感器完成电流转向,从而大大延长了使用寿命。电机最高转速可达15000r/min,最大电流19A,且配备了相关减速机构,确保电机的安全性,同时方便转速控制,最大输出电流限制为15A。此外,同时因为运动模块对控制精度的要求较高,本文采用步进电机来进行轮毂的转向控制,以保证机器人准确无误地到达目标地点;但步进电机转矩较小,不适合较大、较快转向,因此此模块主要应用于低速、低强度的任务环境,运动模块转向结构如图7所示。
该运动模块结构消除了极端环境对机器人应用范围的限制,使机器人实现在狭窄的工作空间中全方位移动,改善了可重构的模块机器人控制的灵活度。其中,全方位移動指的是机器人从二维平面上的任意位置以任意方向移动到当前位置的能力,包括横向运动、纵向运动、倾斜运动和旋转。
3.2 机器人承载能力有限元分析
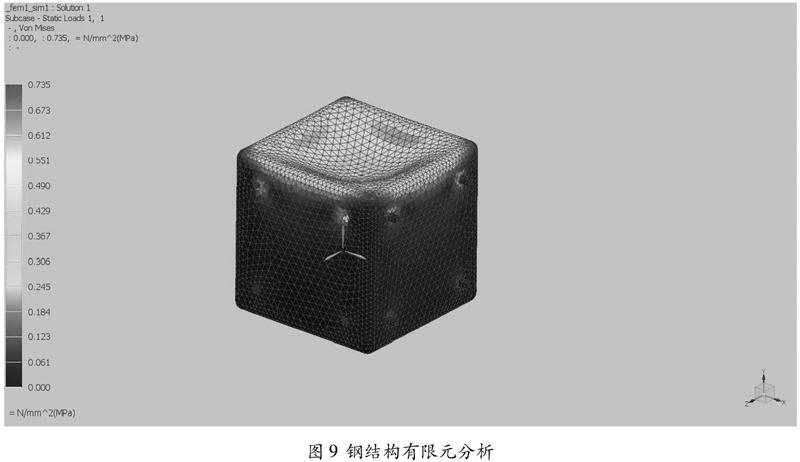
对可重构模块化机器人的单个单元模块的承载能力进行有限元分析。该模块化机器人单元模块的模型由NX 10.0建模(模型如图8、9所示),由NX10.0的“高级仿真”模块进行有限元分析。
3.2.1 环境
求解器:NX NASTRAN。
分析类型:结构。
解算方案类型:SOL 101 线性静态-全局约束。
线性:线性。
3.2.2 材料
解算方法1:ABS,密度为1.05~1.18g/cm3,收缩率为0.4%~0.9%,弹性模量值为2Gpa,泊松比值为0.394,吸湿性<1%,熔融温度217℃~237℃,热分解温度>250℃。
解算方法2:钢(steel),密度一般介于7,750至8,050kg/m3,弹性模量:2.06×10e5MPa,泊松比值为:0.25~0.3。
3.2.3 载荷
载荷大小:98N,载荷方向:沿z轴方向垂直线下(具体如下图所示)。
3.2.4 结果
通过对解算方案的求解,得以下两个模型应力云图,最终确定,在机器人结构简单,负载较小的情况下,可以采用ABS工程塑料作为结构材料,当机器人结构复杂,负载较大的情况下,需要采取钢材作为结构材料。
4 可重构无人车控制系统设计
考虑到机器人在极端环境下可能会遇到的情况,需要保证机器人能够安全、可靠的运行,需要增强其鲁棒性,减少维护成本。
4.1 运动模块轮毂角度实时控制策略
因轮毂转向角的初始化指令只会在可重构模块化机器人启动时执行一次,而在机器人运行过程中,可能会由于路面不平整、传感器出错而产生计划之外的碰撞导致运动模块轮毂角度偏移,若不及时矫正,便会出现累计误差。
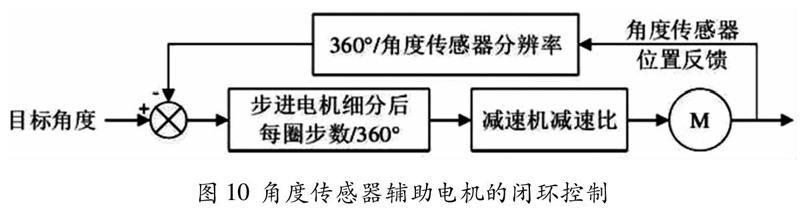
因此,本文考虑对步进电机实行闭环控制策略。如图10所示,这种策略中,主控模块实时监测、读取角度传感器返回值,同时根据当前运动指令计算角度偏差,并向运动模块发送运动指令,即步进电机应前进的步数,从而达到修正偏差的效果。运动指令和运动角度之间的关系满足下式:
式中:s—步进电机最终前进的步数;S—步进电机细分后每圈的步数;G—减速器的减速倍数;θ—目标运动角度;φ—传感器返回值;φmax—传感器最大返回值;φ0—角度零点。
4.2 运动模块电机运动控制策略
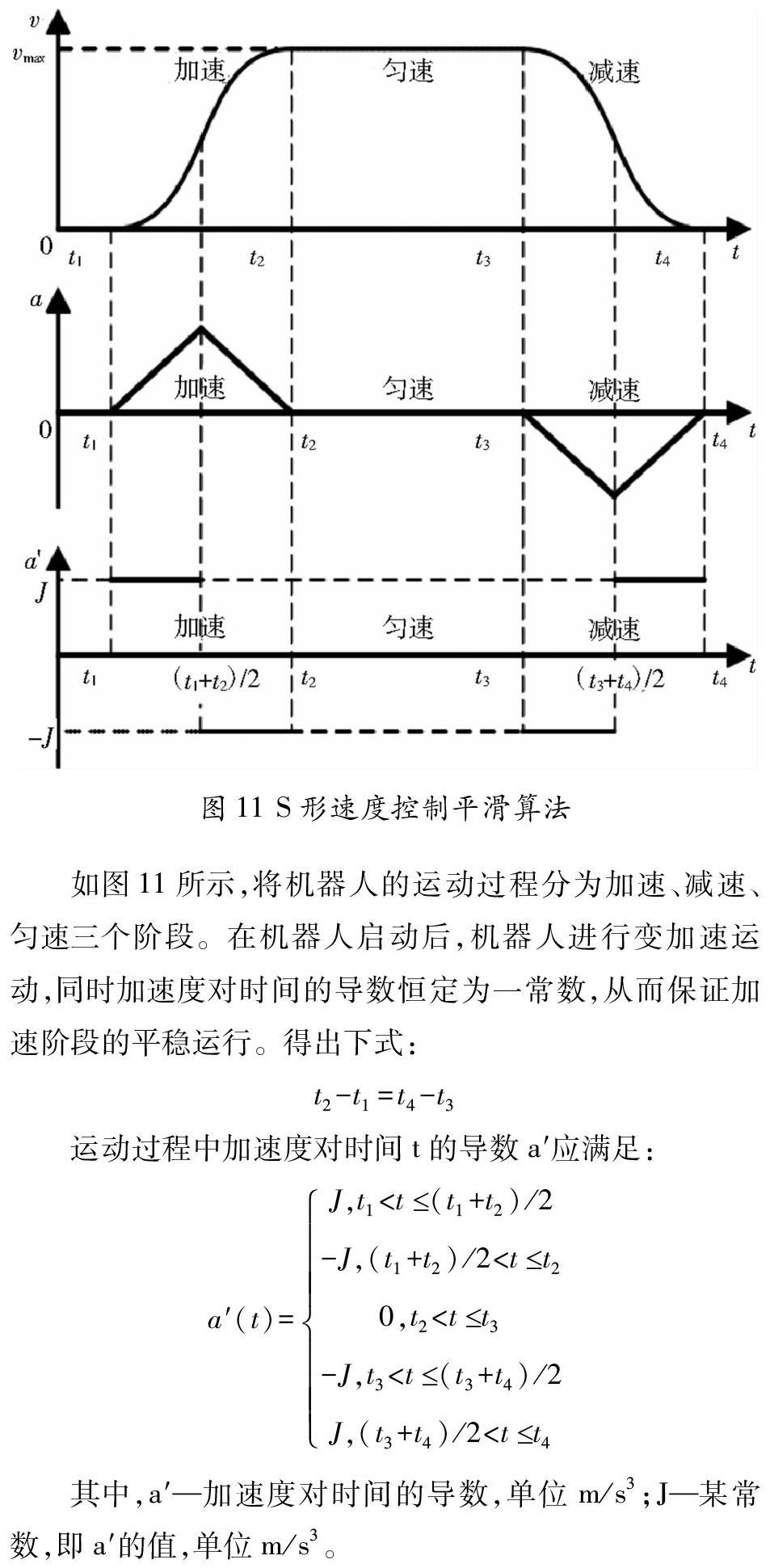
考虑到机器人运作时,可能因速度的突然变化,导致加速度瞬间跳变,产生不必要的机械振动,从而造成机械损伤。本文采用S形控制算法,如图11所示,用以保证机器人的运动平滑,从而增强机器人安全性,减少机械磨损,减小定位误差。
如图11所示,将机器人的运动过程分为加速、减速、匀速三个阶段。在机器人启动后,机器人进行变加速运动,同时加速度对时间的导数恒定为一常数,从而保证加速阶段的平稳运行。得出下式:
5 结论
本文设计的可重构模块化机器人,主要针对基本单元模块与运动模块进行研发分析,实现了模块间机械结构上高效可靠的连接与拆分。针对单元模块的承载能力和模块间的连接能力进行了仿真实验。在控制系统设计中,针对运动模块轮毂转向控制进行了改进,以保证轮毂多次转向后没有累计误差,确保机器人平滑运行,减少机械磨损,增加使用寿命。
参考文献:
[1]Schmitz D,Khosla P,Kanade T.The CMU Reconfigurable Modular Manipulator System.CMU-RI-TR-88-7[R].Pittsburgh:Carnegie Mellon University,1988.
[2]A Albuschffer,Eiberger O,Grebenstein M,et al.Soft robotics[J].Robotics & Automation Magazine IEEE,2008,15(3):20-30.
[3]Schunk GmbH,Co.KG.Schunk modular robotics.[2021-9-11].http://www.schunk-modular-robotics.com/.
[4]郑浩峻,汪劲松,李铁民.可重构机器人单元结构设计及组合特性分析[J].机械工程学报,2003(07):34-37.
[5]王卫忠.可重构模块化机器人系统关键技术研究[D].哈尔滨工业大学,2007.
[6]张国斌.爱沙尼亚新概念模块化无人车[J].国外坦克,2016(03):56.
依托项目:2020年广东省科技创新战略(攀登计划)专项资金基于数据总线技术的模块化机器人(pdjh2020 b0760);2020年度广东省大学生创新创业计划项目:可重构的模块化机器人(S202013684030S)
*通讯作者:孙明(1985— ),男,汉族,河南许昌人,硕士,助理研究员,研究方向:运筹学、机器人调度与控制。
猜你喜欢
商业评论(2022年4期)2022-05-05
红领巾·萌芽(2022年2期)2022-01-31
中国建筑金属结构(2019年4期)2019-05-15
汽车博览(2019年5期)2019-05-07
分析化学(2018年12期)2018-01-22
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国信息化·学术版(2013年1期)2013-05-28
中国计算机报(2009年7期)2009-05-07