摆动缸式油气悬挂系统动态特性参数敏感性分析
2021-01-07 11:23陈盛钊戴巨川张舟钧禹凌启辉陈哲吾
湖南大学学报·自然科学版 2021年12期
关键词:机械
陈盛钊 戴巨川 张舟钧禹 凌启辉 陈哲吾








摘 要:為研究摆动缸式油气悬挂自身参数变化对履带车辆中“负重轮-悬挂-簧载质量”系统的影响,在典型工况下,对该系统的动态响应特征展开参数敏感性分析. 结合油气悬挂的结构特征建立机械-液压耦合的动力学模型,并应用试验台架测试结果评价该模型的有效性. 选取摆动缸式油气悬挂的关键参数,分析其刚度与阻尼特性随关键参数的变化趋势,并在脉冲激励工况下分析上述参数变化对油气悬挂系统动态响应行为的影响. 结果表明:油气悬挂刚度在悬挂变形量不大时受蓄能器内气体初始体积的影响较大,在悬挂压缩变形较大时受油气悬挂定位角的影响较大;簧载质量垂向加速度与负重轮动载荷在低频时受蓄能器初始气体体积影响最大,在高频时受阻尼阀孔截面积影响最大;悬挂动行程受关键参数的影响趋势与之相反.
关键词:车辆悬挂;动态响应特征;摆动缸式油气悬挂;机械-液压耦合系统;参数敏感性
中图分类号:U469.6 文献标志码:A
Parameter Sensitivity Analysis of Dynamic Characteristics
of Swing-cylinder Hydro-pneumatic Suspension System
CHEN Shengzhao†,DAI Juchuan,ZHANG Zhoujunyu,LING Qihui,CHEN Zhewu
(School of Mechanical Engineering,Hunan University of Science and Technology,Xiangtan 411201,China)
Abstract:In order to investigate the influence of the parameters of the swing-cylinder hydro-pneumatic suspension (HPS) on the “load wheel - suspension - sprung mass” system, a parameter sensitivity analysis on the dynamic response characteristics of the system was conducted under typical working conditions. The mechanical-hydraulic coupled dynamic model was built according to the structural characteristics of the HPS, and then it was verified with the comparison of the results obtained by simulation and experiments from the test rig. The key parameters of the HPS were selected to study their influence on the variation trend of the stiffness and damping characteristics of the suspension, after that their impacts on the dynamic response behavior of the HPS system were investigated under bump excitation. The results show that the stiffness of HPS system is greatly influenced by the initial gas volume of the accumulator when suspension deflection is small,while the position angle of the hydraulic suspension affects most when suspension deflection becomes large at compression travel; the vertical acceleration at the center-of-gravity of the sprung mass and the wheel load are most affected by the initial gas volume of the accumulator at low frequencies and it is most affected by the cross-section area of the damping valve at high frequencies; the suspension deflection is affected by these parameters in a reverse trend.
Key words:vehicle suspensions;dynamic response characteristics;swing-cylinder hydro-pneumatic suspension;mechanical-hydraulic coupled system;parameter sensitivities
在履带车辆发展过程中[1-4],油气悬挂(Hydro-pneumatic Suspension,HPS)以其非线性、变刚度、高承载等特点受到越来越多的关注. 在履带车辆上应用较多的油气悬挂主要有摆动缸式、固定缸式、肘内式等多种结构. 其中,摆动缸式油气悬挂安装于车体外侧面与负重轮之间,具有节省车体空间与降低非簧载质量等优点,成为当前履带车辆悬挂发展的一种重要形式.
一般地,油气悬挂系统主要包含液压作动器、液压回路、蓄能器与减振阀等部分. 油气悬挂的显著特点是可以利用蓄能器内稀有气体的非线性变刚度特性,实现在悬挂动行程较小时保证车辆行驶平顺性,在动行程较大时保证车辆行驶安全性[5-8]. 目前,国内外学者针对油气悬挂广泛开展了应用研究,提出了多种结构形式以改善车辆动态性能[9-13]. 同时,也有学者关注履带车辆中油气悬挂系统的应用研究,其研究内容主要集中在两个方面:一是履带与油气悬挂系统的相互作用研究. 张晨曦等[14]论证了与传统扭杆弹簧悬挂相比,油气悬挂的非线性特性能改善车辆行驶平顺性. 郭孔辉等[9]通过联合仿真验证了油气耦联悬挂能明显提升车辆平顺性. Kwon等[8]分析了当油液中混合有气泡时,油气悬架对车辆平顺性的影响.
综上所述,虽然有关油气悬挂的研究已经受到广泛关注,且已有相关文献对油气悬挂的参数敏感性展开分析[15-17],但针对摆动缸式油气悬挂进行理论建模和动态性能分析的研究还很匮乏. 与常规油气悬挂竖直地安装于簧载与非簧载质量之间不同,摆动缸式油气悬挂斜置于簧载质量之上(直接或间接地),从而导致摆动缸式油气悬挂与常规油气悬挂的力学特性存在明显差异. 此外,有关履带车辆油气悬挂的研究多采用 RecurDyn 与 LMS 等商业软件[14,18-19],难以有效分析油气悬挂参数与车辆动态性能之间的映射关系. 因此,有必要对摆动缸式油气悬挂系统开展理论建模研究,并分析其动态响应对相关参数的敏感性,为后期开展装有摆动缸式油气悬挂的多轴履带车辆动态性能研究奠定理论基础.
1 摆动缸式油气悬挂系统模型
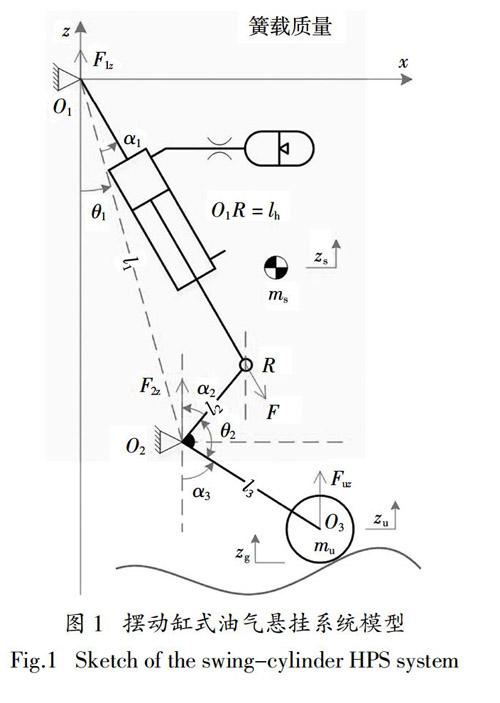
图1为摆动缸式油气悬挂系统模型. 该系统主要包含簧载质量、摆动缸式油气悬挂与负重轮三个部分. 油气悬挂连接簧载质量与负重轮,是承载簧载重量、传递路面激励与隔振降噪的重要部件. 油气悬挂系统包含液压作动缸、蓄能器及减振阀等部件. 液压缸无杆腔与蓄能器及减振阀相连,有杆腔与供油箱相连,因此,有杆腔的油压可近似为零. 同时,减振阀集成在蓄能器中,可等效为阻尼阀与单向阀的组合作用.
建模过程中,作如下假设:1)相对于车体质量,液压作动器的质量可忽略; 2)履带车辆两侧油气悬挂系统液压作动器的有杆腔均与供油箱相连,有杆腔油液油压近似为零; 3)忽略履带对车轮动载荷的影响;4)相对于减振阀内的阻尼,管道阻尼可忽略;5)相对于蓄能器内气体压缩性能,油液的压缩性可忽略.
如图1所示,当路面激励为zg(t)时,设此时负重轮的位移为 zu(t),簧载质量的位移为zs(t). 在路面激励频率较低时,负重轮与路面可保持良好接触,因此可认为此时zu(t)=zg(t). 根据几何关系可得:
l3 cos α30 - l3 cos α3 = zu - zs (1)
式中:下标“0”表示初始状态,如α30表示初始状态下平衡肘下臂与z轴的夹角. 此外,为表述方便,将α3(t)简化为α3,zg(t)简化为zg,液压作动器长度 lh(t)简化为lh,其余类似.
平衡肘下臂与z平面的夹角为:
α3 = arccoscos α30 -
(2)
平衡肘上臂与 z 轴的夹角为α2=π-θ2-α3,可得变形后 lh(t)为lh(t)=,进而求得液压作动缸中油液体积流出量为ΔV=A(lh(t)-lh(0)),其中,A 为液压作动缸无杆腔截面积; ΔV是液压作动缸无杆腔内流出油液的体积,也是蓄能器内注入油液的体积(即稀有气体体积的减少量).
不考虑温度变化的影响,可得到蓄能器内气体压强为:
pa = p01 +
(3)
式中:p0、V0分别表示初始状态下蓄能器内气体的初始压强和初始体积;pa表示气体体积变化后蓄能器内气体压强.
将蓄能器出口处减振阀等效为一个阻尼阀和一个单向阀,则该减振阀引起的压降损失为:
Δp=sign(Q) (4)
式中:Cd为流量系数;Av为阻尼阀孔截面积;Ad为单向阀孔截面积;ρ为油液密度;Q为通过小孔的油液流量,其计算式为Q = dΔV/dt;sign(x)为符号函数.
从而可得到液压作动缸内油液压强为p = pa + Δp,此时液压作动缸两端的输出力为F = pA. 以平衡肘与负重轮为研究对象,对 O2点取力矩平衡,考虑平衡肘負重轮的转动惯性力矩,可得到力矩平衡方程:
(Ie + mu l2
3)[α] 3-Fuz l3 sin α3+Fl2 sin(θ1+α1+α2)=0 (5)
式中:θ1为摆动缸式油气悬挂的安装定位角,即两个安装支点连线与 z 轴的夹角;Ie为平衡肘相对于 O2点的转动惯量;mu为负重轮质量;Fuz为路面不平度对负重轮的z向作用力.
在ΔO1O2R中,易得液压作动缸与O1O2的夹角为:
α1 = arcsin
sin(θ1+α2) (6)
结合式(5)与式(6),可得负重轮的动载荷为:
Fuz = (7)
对平衡肘在z轴方向取力平衡方程,可得:
F2z = Fuz - F cos(θ1 + α1) (8)
式中:F2z表示平衡肘对车体在z轴方向的作用力.
同时对液压作动缸在z轴方向取力平衡方程,可得:
F1z = F cos(θ1 + α1) (9)
式中:F1z表示液压作动缸对车体在z轴方向的作用力.
因此,油气悬挂对车体在z轴方向的作用力为:
Fsu = F1z + F2z (10)
由于油气悬挂两个支点O1与O2均固定于车体上,可得到车体的动力学平衡方程为:
ms [z] s - Fsu = 0 (11)
式中:ms为单轮簧载质量;[z] s为车体质心处的垂向加速度.
2 摆动缸式油气悬挂系统试验
为评价摆动缸式油气悬挂系统模型的有效性,在现有摆动缸式油气悬挂系统试验测试平台上开展典型路况下试验研究并进行对比分析. 如图2所示,该试验平台包括车体、摆动缸式油气悬挂、负重轮及其导向机构、激振器、油压传感器、位移传感器等. 在试验评价过程中,考虑到液压作动器内油压是油气悬挂系统状态求解的重要中间变量,二者相互影响,因此,可利用仿真与试验的油压对比结果对所建立的油气悬挂系统数学模型进行评价.
在仅考虑车轮受到垂向激励时,履带板对负重轮的作用主要是滤除路面激励的高频信号[20]. 因此,在激励信号为低频时,可忽略zg(t)与zu(t)之间的差异. 本文激励信号(见图3)的频率fs = 0.55 Hz,远低于路面不平度时间频率上限的最小值fu = 14.62 Hz[20]. 因此,本次试验评价过程与后续仿真分析过程均认为 zu(t) = zg(t).
试验过程中,通过外部加载机构对负重轮施加位移激励(如图3所示),负重轮沿导向机构运动,进而通过平衡肘带动油气悬挂两端产生相对运动,导致蓄能器内气体体积与减振阀处油液运动速度发生变化,使油气悬挂内油液状态发生变化,从而抑制车体振动.
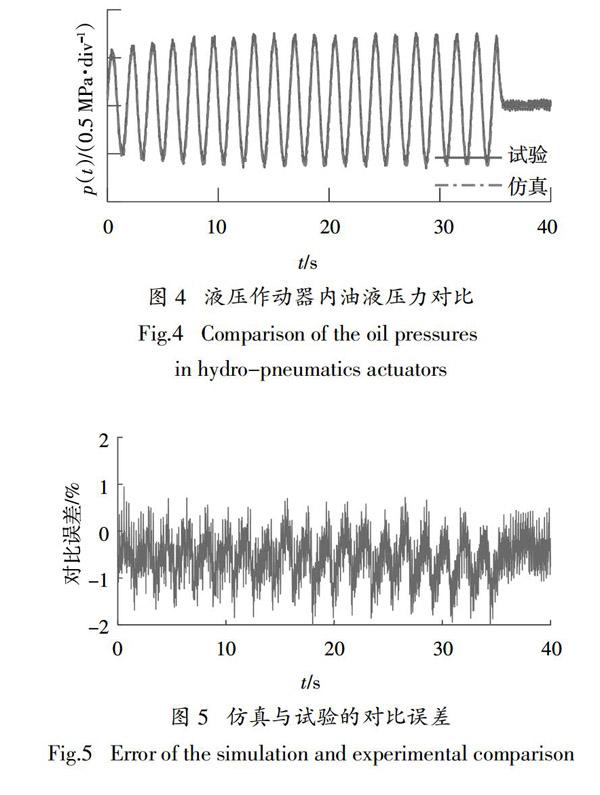
试验时,油压传感器型号为 CYB4211,量程 0~60 MPa,利用其获取油气悬挂内油压变化的试验数据. 同时,对油气悬挂系统模型输入相同激励获取相应的仿真数据,将该数据与试验结果进行对比,如图4所示,相应的仿真误差如图5所示.
由图4与图5可知,仿真与试验的相对误差低于3%. 产生误差的主要原因是仿真模型与试验结构的物理参数难以完全一致. 另外,对比图3和图4可以看出,在输入位移zu(t)保持为零后,油液压力 p(t)在零值附近波动,其主要原因是图3中输入位移为控制系统设定输入值,图4中油液压力是传感测试系统的采集信号,信号在采集与传输过程中受到外界振动、电磁等干扰的影响. 但总体上,仿真与试验的相对误差在可接受范围内,从而佐证所建立摆动缸式油气悬挂系统模型的有效性.
3 油气悬挂系统动态特性参数敏感性分析
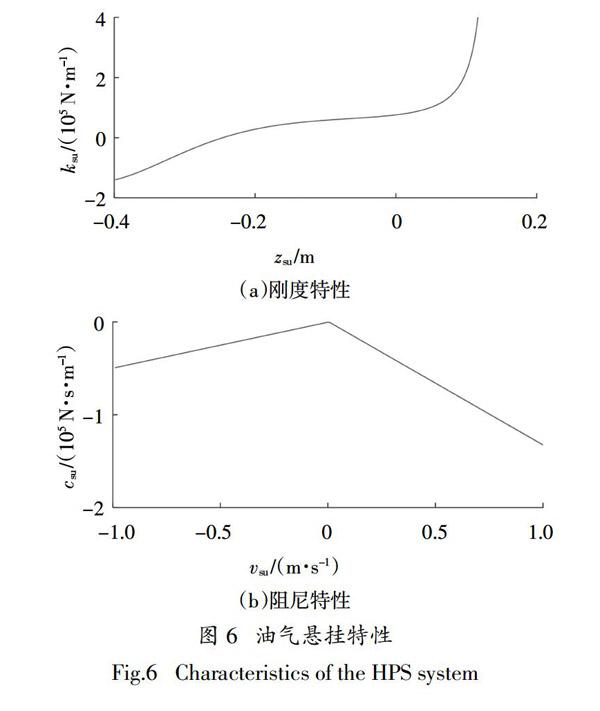
为研究油气悬挂系统(负重轮-悬挂-簧载质量)动态响应特征对其相关参数变化的敏感性,应用上述验证模型开展动力学仿真分析. 分析过程中,设簧载质量ms = 2 278.1 kg,负重轮质量mu = 332 kg[21],平衡肘转动惯量Ie = 6.6 kg·m2,蓄能器内气体初始压强 p0 = 7.856 MPa,蓄能器初始气体体积V0 = 1 L,阻尼阀孔截面积Av = 1.96×10-5 m2,单向阀孔截面积Ad = 1.26×10-5 m2,油液密度ρ = 860 kg/m3,黏度系数取 Cd = 0.62. 结合上述参数数值,将式(10)中的油气悬挂对簧载质量的作用力Fsu分别对悬挂动行程zsu及其导数dzsu /dt求导,可得到相应的刚度与阻尼曲线,如图6所示.
图6(a)中刚度曲线较常规刚度曲线存在差异,如出现零值与负值,这是由计算规则引起的. 由计算可知,当悬挂变形量由zsu = 0 逐渐压缩至zsu = -0.246 m 时,α2角减小至约10°,α3角增大至约 90°,即图1中O2O3与地面水平线接近平行,此时路面位移输入对油缸长度变化量影响很小,即蓄能器内气体压强变化量很小且油缸输出力基本不变,故此时油气悬挂刚度接近于零;在该过程中,由该油气悬挂的几何结构可知,平衡肘上摆臂对油缸两端点间长度变化量的贡献越来越小,即油缸输出力Fsu的增长率逐渐变小,故刚度ksu越來越小. 当悬挂继续压缩时,平衡肘下摆臂运动导致l3在水平线上的投影 l3 sin α3减小,结合式(7)~(10)可知,此时油缸输出力Fsu的增长率反而变大,故刚度ksu反向变大. 另一方面,当悬挂变形量由zsu = 0 逐渐压缩至zsu = 0.14 m 时,α3角减小至约 0°,即投影l3 sin α3减小至零,结合式(7)~(10)知刚度ksu增长率变快. 由上述分析可知,摆动缸式油气悬挂与常规油气悬挂的刚度特性存在明显不同[17].
由图6(b)知油气悬挂在压缩与伸长过程中的阻尼曲线有明显差异,其主要原因是减振阀在正反向油液流动时阀孔面积存在差异,从而保证油气悬挂能在压缩行程中快速吸收地面冲击,并在伸长行程中快速减振,进而提升油气悬挂系统动态性能.
设计评价该油气悬挂系统动态性能的指标为车体质心处垂向加速度、悬挂动行程与负重轮动载荷. 为开展后续油气悬挂动态响应研究,取路面脉冲激励函数为[22]:
zg(t) =
(1 - cos(2πft)),0≤t≤l/v
0,t>l/v (12)
式中:h 与 l 分别为路面凸起高度与长度;v 为车速;f = v/l 为激励频率. 选取 h = 0.1 m,l = 5 m,分别在 f取值 1 Hz、2 Hz与4 Hz (分别对应车速v = 18 km/h、36 km/h 与 72 km/h)时,获取车体质心处加速度az、悬挂动行程zsu与负重轮动载荷Fzu,如图7所示.
由图7(a)可知,车体加速度响应幅值随激振频率的增加而上升;由图7(b)可知,悬挂动行程对激振频率变化表现为正向峰值减小而负向峰值增大;由图7(c)可知,负重轮动载荷幅值随激振频率的上升而明显变大,且其变化规律与图7(a)相似. 其主要原因是,图1中油气悬挂系统刚度较大,负重轮动载荷与簧载质量受到的悬挂力差异较小,故簧载质量加速度与负重轮动载荷变化曲线呈现明显的相似特征. 一般地,在车辆动态分析中,簧载质量垂向加速度是车辆平顺性评价的重要组成部分,悬挂动行程是评价悬挂是否发生击穿的重要指标,车轮动载荷是评价车辆道路友好性的重要成分. 因此,本文将上述3个状态量的变化幅值作为评价油气悬挂系统动态性能的特征. 同时,根据工程设计经验选取V0、θ1、Av为油气悬挂设计的关键参数,开展摆动缸式油气悬挂系统动态响应特征与上述参数的敏感性关系分析.
3.1 蓄能器初始气体体积的影响
初始气体体积V0直接影响蓄能器内气体弹簧特性,是导致油气悬挂系统刚度变化的重要参数. 选取V0变化区间为[1,4] L,通过计算可得到油气悬挂刚度ksu变化曲线,如图8所示.
由图8可以看出,ksu随V0的增大而减小,且其zsu - ksu曲线均经过点 (-0.246 m,0 N/m). 由式(3)可知p仅由ΔV 决定,ΔV 与α1 均仅由zsu决定. 因此,在不考虑阻尼时,Fsu 拐点位置仅由zsu决定,从而导致zsu - ksu曲线均交汇于同一位置.
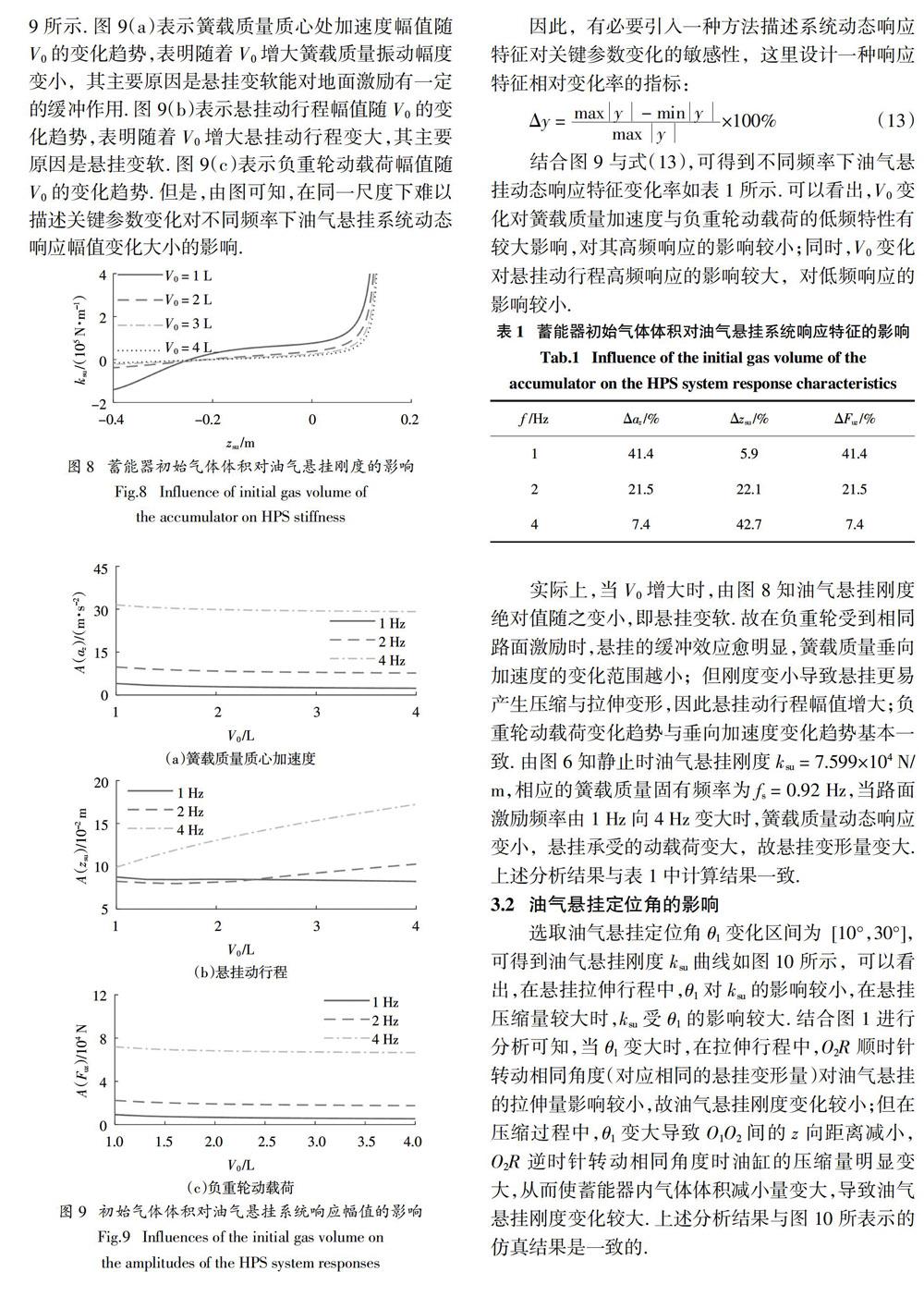
V0与az、zsu和Fzu响应特征之间的映射关系如图9所示. 图9(a)表示簧载质量质心处加速度幅值随V0的变化趋势,表明随着V0增大簧载质量振动幅度变小,其主要原因是悬挂变软能对地面激励有一定的缓冲作用. 图9(b)表示悬挂动行程幅值随V0 的变化趋势,表明随着V0增大悬挂动行程变大,其主要原因是悬挂变软. 图9(c)表示负重轮动载荷幅值随V0的变化趋势. 但是,由图可知,在同一尺度下难以描述关键参数变化对不同频率下油气悬挂系统动态响应幅值变化大小的影响.
因此,有必要引入一种方法描述系统动态响应特征对关键参数变化的敏感性,这里设计一种响应特征相对变化率的指标:
Δy = ×100% (13)
结合图9与式(13),可得到不同频率下油气悬挂动态响应特征变化率如表1所示. 可以看出,V0 变化对簧载质量加速度与负重轮动载荷的低频特性有较大影响,对其高频响应的影响较小;同时,V0变化对悬挂动行程高频响应的影响较大,对低频响应的影响较小.
实际上,当V0增大时,由图8知油气悬挂刚度绝对值随之变小,即悬挂变软. 故在负重轮受到相同路面激励时,悬挂的缓冲效应愈明显,簧载质量垂向加速度的变化范围越小;但刚度变小导致悬挂更易产生压缩与拉伸变形,因此悬挂动行程幅值增大;负重轮动载荷变化趋势与垂向加速度变化趋势基本一致. 由图6知静止时油气悬挂刚度ksu = 7.599×104 N/m,相应的簧载质量固有频率为fs = 0.92 Hz,当路面激励频率由 1 Hz 向 4 Hz 变大时,簧载质量动态响应变小,悬挂承受的动载荷变大,故悬挂变形量变大. 上述分析结果与表1中计算结果一致.
3.2 油氣悬挂定位角的影响
选取油气悬挂定位角θ1变化区间为[10°,30°],可得到油气悬挂刚度ksu曲线如图10所示,可以看出,在悬挂拉伸行程中,θ1对ksu的影响较小,在悬挂压缩量较大时,ksu受θ1的影响较大. 结合图1进行分析可知,当θ1变大时,在拉伸行程中,O2R 顺时针转动相同角度(对应相同的悬挂变形量)对油气悬挂的拉伸量影响较小,故油气悬挂刚度变化较小;但在压缩过程中,θ1变大导致O1O2间的z向距离减小,O2R逆时针转动相同角度时油缸的压缩量明显变大,从而使蓄能器内气体体积减小量变大,导致油气悬挂刚度变化较大. 上述分析结果与图10所表示的仿真结果是一致的.
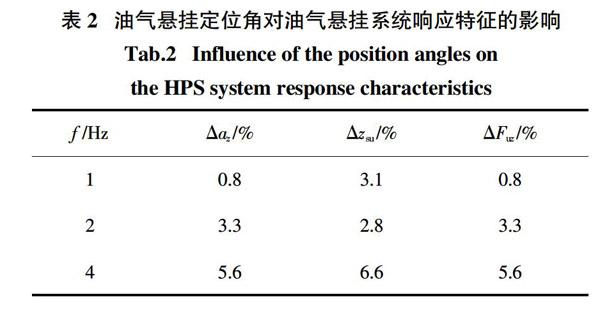
θ1与az、zsu和Fzu响应特征之间的映射关系如图11所示,油气悬挂系统响应特征变化率如表2所示. 图11(a)表明不同频率下簧载质量垂向加速度幅值受θ1的影响较小;图11(b)表明θ1对悬挂动行程的影响较小;图11(c)表明θ1对负重轮动载荷的影响也较小.
实际上,由式(12)中假设可知,路面激励导致负重轮位移区间为[0,0.1] m,相应地悬挂最大压缩量小于 0.1 m,结合图10可知油气悬挂刚度变化不大,故油气悬挂系统动态响应变化较小. 上述分析与图11及表2中计算结果一致.
由图12可知,由于单向阀的存在,油气悬挂在压缩过程的阻尼系数小于拉伸过程的阻尼系数;同时,Av变化对csu 有明显影响,Av越小阻尼系数越大. 由式(4)知,阻尼阀孔越小引起的流体压降损失越大,故其阻尼系数越大. Av与az、zsu和Fzu响应特征之间的映射关系如图13所示,悬挂系统响应特征变化率如表3所示.
圖13(a)表示簧载质量垂向加速度幅值随Av的变化趋势;图13(b)表示悬挂动行程随Av的变化趋势;图13(c)表示负重轮动载荷随Av的变化趋势. 结合式(12)可知,当激励频率f = 1 Hz 时负重轮最大速度为 0.314 m/s,当激励频率f = 4 Hz 时负重轮最大速度为 1.256 m/s,结合图12知激励频率越高液压系统的阻尼系数越大,油气悬挂对路面激励的衰减作用越强,相应地簧载质量的垂向加速度越小,因此垂向加速度的幅值减小量随激励频率上升而变大,这与图13和表3的分析结果一致.
实际上,Av越大油气悬挂阻尼系数越小,悬挂偏软,在受到相同路面激励时,油气悬挂被压缩得越多,能及时缓解路面冲击,故簧载质量的垂向加速度变小,同时负重轮受到的冲击力也变小. 上述分析结果与图13的仿真结果是一致的.
将图8与图10进行对比分析后可知,在悬挂变形量不大时,V0对ksu的影响最大,在悬挂压缩量较大时,θ1 对ksu的影响最大. 同时,将表1~表3中结果进行统计分析,可得到悬挂系统响应特征对各关键参数的敏感性总结,如表4所示. 结合图表可知,V0对az 和Fuz的低频响应影响较大,对zsu的高频影响较大;θ1对油气悬挂动态响应的影响较小;Av对az和Fuz 的高频响应影响较大,对zsu的低频影响较大.
4 结 论
本文就摆动缸式油气悬挂关键参数对履带车辆中“负重轮-悬挂-簧载质量”系统动态响应特性的影响展开研究. 首先,结合现有油气悬挂系统的结构特征建立机械-液压耦合的油气悬挂系统(包含负重轮、悬挂与簧载质量)动力学模型,结合台架试验测试结果对该模型进行试验评价. 选取油气悬挂系统设计的3个关键参数分别为蓄能器初始气体体积、油气悬挂定位角与阻尼阀孔截面积,分析油气悬挂系统动态响应特征与上述关键参数之间的敏感性关系. 结果表明:
1)台架试验结果证实所建立的油气悬挂动力学模型能有效描述摆动缸式油气悬挂系统的振动行为.
2)在悬挂变形量不大时,油气悬挂刚度受蓄能器初始气体体积的影响较大;在悬挂压缩量较大时,受油气悬挂定位角的影响最大;阻尼阀孔截面积大小对油气悬挂阻尼有显著影响.
3)簧载质量垂向加速度与负重轮动载荷在低频时受蓄能器初始气体体积影响最大,在高频时受阻尼阀孔截面积影响最大;悬挂动行程在低频时受阻尼阀孔截面积影响最大,在高频时受蓄能器初始气体体积影响最大.
参考文献
[1] SOLOMON U,PADMANABHAN C. Hydro-gas suspension system for a tracked vehicle:modeling and analysis[J]. Journal of Terramechanics,2011,48(2):125—137.
[2] ATA W G,SALEM A M. Semi-active control of tracked vehicle suspension incorporating magnetorheological dampers[J]. Vehicle System Dynamics,2017,55(5):626—647.
[3] 刘斌,王志福. 履带车辆动力系统发展综述[J]. 四川兵工学报,2014,35(1):68—72.
LIU B,WANG Z F. Overview of power system development of tracked vehicle[J]. Journal of Sichuan Ordnance,2014,35(1):68—72. (In Chinese)
[4] 胡彩兵,涂群章,杨旋,等. 基于Recurdyn的三角履带行驶系统建模及仿真[J]. 兵器装备工程学报,2020,41(11):89—94.
HU C B,TU Q Z,YANG X,et al. Modeling and simulation of triangle crawler driving system based on Recurdyn[J]. Journal of Ordnance Equipment Engineering,2020,41(11):89—94. (In Chinese)
[5] REN H B,CHEN S Z,ZHAO Y Z,et al. State observer-based sliding mode control for semi-active hydro-pneumatic suspension[J]. Vehicle System Dynamics,2016,54(2):168—190.
[6] DU M M,ZHAO D X,NI T,et al. Output feedback control for active suspension electro-hydraulic actuator systems with a novel sampled-data nonlinear extended state observer[J]. IEEE Access,2020,8:128741—128756.
[7] ZHAO Y Q,HAN X,DENG Y J,et al. Multi-objective optimization for ride comfort of hydro-pneumatic suspension vehicles with mechanical elastic wheel[J]. Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automobile Engineering,2019,233(11):2714—2728.
[8] KWON K,SEO M,KIM H,et al. Multi-objective optimisation of hydro-pneumatic suspension with gas-oil emulsion for heavy-duty vehicles[J]. Vehicle System Dynamics,2020,58(7):1146—1165.
[9] 郭孔輝,陈禹行,庄晔,等. 油气耦连悬架系统的建模与仿真研究[J]. 湖南大学学报(自然科学版),2011,38(3):29—33.
GUO K H,CHEN Y H,ZHUANG Y,et al. Modeling and simulation study of hydro-pneumatic interconnected suspension system [J]. Journal of Hunan University (Natural Sciences),2011,38(3):29—33. (In Chinese)
[10] 丁飞,张农,韩旭. 安装液压互联悬架货车的机械液压多体系统建模及模态分析[J]. 机械工程学报,2012,48(6):116—123.
DING F,ZHANG N,HAN X. Modeling and modal analysis of multi-body truck system fitted with hydraulically interconnected suspension[J]. Journal of Mechanical Engineering,2012,48(6):116—123. (In Chinese)
[11] 吴晓建,周兵,文桂林. 液压互联悬架抗侧倾控制研究[J]. 中国公路学报,2018,31(3):123—132.
WU X J,ZHOU B,WEN G L. Hydraulically interconntected suspension anti-roll control research[J]. China Journal of Highway and Transport,2018,31(3):123—132. (In Chinese)
[12] 沈钰杰,陈龙,刘雁玲,等. 基于非线性流体惯容的车辆悬架隔振性能分析[J]. 汽车工程,2017,39(7):789—795.
SHEN Y J,CHEN L,LIU Y L,et al. Analysis of vibration isolation performance of vehicle suspension with nonlinear fluid inerter[J]. Automotive Engineering,2017,39(7):789—795. (In Chinese)
[13] 汪若尘,孙东,丁仁凯,等. 液压互联馈能悬架工作模式设计与试验研究[J]. 振动与冲击,2020,39(5):112—117.
WANG R C,SUN D,DING R K,et al. Working mode design and tests for hydraulically interconnected energy-feeding suspension[J]. Journal of Vibration and Shock,2020,39(5):112—117. (In Chinese)
[14] 张晨曦,雷强顺,冯占宗,等. 高速履带车辆平顺性仿真分析[J]. 舰船电子工程,2018,38(4):57—59.
ZHANG C X,LEI Q S,FENG Z Z,et al. Analysis and simulation on ride comfort of high-speed tracked vehicle[J]. Ship Electronic Engineering,2018,38(4):57—59. (In Chinese)
[15] 田玲玲,谷正气,李伟平,等. 非线性油气悬架系统平顺性仿真与参数优化设计[J]. 中南大学学报(自然科学版), 2011, 42(12):3715—3721.
TIAN L L,GU Z Q,LI W P,et al. Ride comfort simulation and parameters optimization design of nonlinear hydro-pneumatic suspension system[J]. Journal of Central South University (Science and Technology),2011,42(12):3715—3721. (In Chinese)
[16] 张农,王少华,张邦基,等. 液压互联悬架参数全局灵敏度分析与多目标优化[J]. 湖南大学学报(自然科学版),2020,47(10):1—9.
ZHANG N,WANG S H,ZHANG B J,et al. Global sensitivity analysis and multi-objective optimization of hydraulically interconnected suspension parameters[J]. Journal of Hunan University (Natural Sciences),2020,47(10):1—9. (In Chinese)
[17] CAO D P,RAKHEJA S,SU C Y. Roll- and pitch-plane coupled hydro-pneumatic suspension[J]. Vehicle System Dynamics,2010, 48(3):361—386.
[18] 卞美卉,張洋,杜志岐. 履带车辆负重轮载荷的分配与平顺性仿真[J]. 计算机仿真,2020,37(9):104—108.
BIAN M H,ZHANG Y,DU Z Q. Load-bearing wheel’s load distribution and ride comfort simulation of tracked vehicle [J]. Computer Simulation,2020,37(9):104—108. (In Chinese)
[19] 高晓东,管继富,顾亮,等. 履带车辆油气悬挂弹性特性研究[J]. 拖拉机与农用运输车, 2014, 41(4):10—13.
GAO X D, GUAN J F, GU L, et al. Stiffness characteristic of hydro-pneumatic suspension in tracked vehicle[J]. Tractor & Farm Transporter, 2014, 41(4):10—13. (In Chinese)
[20] 孟磊, 李晓雷, 邱实, 等. 履带对履带车辆车体振动影响的分析[J]. 车辆与动力技术, 2015(4):1—5.
MENG L, LI X L, QIU S, et al. Influence analysis of tracks on body vibration for a tracked vehicle[J]. Vehicle & Power Technology, 2015(4):1—5. (In Chinese)
[21] 朱兴高. 高速履带车辆负重轮系-履带-地面耦合动态特性研究[D]. 北京:北京理工大学, 2015:57.
ZHU X G. Coupling dynamic characteristic research for wheels-track-terrain system of high-speed tracked vehicles[D]. Beijing:Beijing Institute of Technology, 2015:57. (In Chinese)
[22] CHEN H, GUO K H. Constrained H∞ control of active suspensions:an LMI approach[J]. IEEE Transactions on Control Systems Technology, 2005, 13(3):412—421.收稿日期:2021-01-07
基金项目:国防基础科研项目;湖南省教育厅资助项目(181419),Foundation of Hunan Educational Committee(181419)
作者简介:陈盛钊(1983—),男,河南信阳人,湖南科技大学讲师,博士
通信联系人,E-mail:chen_shengzhao@126.com
猜你喜欢
电脑报(2021年11期)2021-07-01
电脑报(2020年35期)2020-09-17
电脑报(2020年30期)2020-08-11
当代工人(2020年8期)2020-05-25
电脑报(2019年40期)2019-09-10
小溪流(画刊)(2017年12期)2018-01-10
知识就是力量(2017年6期)2017-06-29
中学生数理化·中考版(2016年2期)2016-09-10
科技知识动漫(2016年1期)2016-01-27
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25