
基于干扰观测器的弹药传输机械臂非线性连续时变反馈控制
2021-01-08 05:33王茜侯保林姚来鹏文浩
兵工学报 2020年11期
王茜, 侯保林, 姚来鹏, 文浩
(南京理工大学 机械工程学院, 江苏 南京 210094)
0 引言
弹药传输机械臂是弹药自动装填系统的重要组成部分之一,其功能是将弹药传输到炮尾待装填位置[1]。从结构上看,弹药传输机械臂是一类特殊的机械臂。实现弹药传输机械臂的快速精确定位控制,对于提高火炮武器系统的射速从而提升其性能具有重要意义。
在弹药传输机械臂工作过程中存在基础振动干扰和负载不确定性,同类型的机械臂系统在其他领域也有广泛应用。对于这类系统,运动精度要求都是非常高的,而在这类机械臂工作过程中,几乎都受到基础振动干扰和负载变化等非线性因素的影响,给其动力学分析和控制研究带来了困难。
在机械臂系统研究中,由环境外干扰引起的基础振动问题是不可忽视的,因此对于此类机械臂的运动控制问题研究也是一大热点。文献[2]通过一种等效随机噪声过程来描述随机基础振动的影响,在此基础上设计了一种状态反馈步进控制器来解决一类机器人机械臂的轨迹控制问题。文献[3]将控制目标分解为两个子系统,然后分别设计下层控制器来控制子系统,最后通过上层控制器处理子系统之间的相互关系。Toda及其团队深入研究了安装在船舶或海洋结构上的机械臂控制问题[4],采用的主要是H∞方法,并将之与其他不同的控制方案相结合,例如比例微分(PD)控制、非线性时变积分滑模控制及卡尔曼滤波方法等,但是在研究中需要获得基础振动频率的先验知识。
本文研究的弹药传输机械臂运动过程中受到的基础扰动产生的原因[5]有:1)火炮武器系统行驶于不平坦路面导致的车体振动;2)车体悬挂系统工作时使车体产生的小幅高频振动;3)“多发同时弹着”工作模式下连续后坐力导致的车体振动。显然,对于弹药传输机械臂的基础振动,其振动频率的先验知识是无法准确获知的。
负载不确定性是弹药传输机械臂系统的另一个非线性因素,其在动力学方程中表现为负载质量和转动惯量的参数不确定性。针对这类问题,自适应控制[6]、神经网络方法[7]、模糊逻辑控制[8]等方法常被采用,此外,干扰观测器[9]也是一个很好的选择。
针对弹药传输机械臂存在基础振动干扰和负载不确定性的问题,本文采用一种基于系统Lyapunov函数的非线性控制策略[10-12]对其定位控制问题进行研究,这种方法从形式上表现为一种连续时变的PD控制,但其中比例系数和微分系数取决于系统的Lyapunov函数,是系统误差变量的可微函数。为克服系统包含基础扰动、负载不确定性在内的复合非线性干扰,选用一种有限时间非线性干扰观测器(FTNDO)对干扰项进行估计,并根据估计值在控制中引入相应的扰动补偿。
本文首先介绍了弹药传输机械臂原理样机的结构及工作原理,在此基础上建立机械臂系统在垂直和俯仰复合振动干扰下的动力学方程;然后设计了基于非线性干扰观测器扰动补偿的非线性连续时变反馈控制器,并证明了控制系统的闭环稳定性;最后根据不同工况设计了3组实验分别验证了所设计控制方案对基础振动和负载不确定复合扰动的鲁棒性,以及扰动补偿对于控制效率提高的有效性。实验结果表明,本文所研究的控制方法对基础扰动和负载不确定性具有良好的鲁棒性,且控制速度快、精度高,控制性能稳定,验证了算法的有效性。
1 问题描述和系统动力学建模
为方便实验,本文以某火炮弹药协调器实验用原理样机为研究对象,其三维模型如图1所示。机械臂由一个直流电机经两个减速器减速后驱动,为减轻电机负载,保证系统的平稳运动,将一个气弹簧连接到机械臂上,以提供一定的平衡力矩。整个机械臂系统安装固定在一个由型材搭成的框架结构上,型材结构与安装板固定,安装于一个三自由度振动平台上。振动平台由3个相同的伺服电机以及3个相同的电动缸组成,可以产生3个方向的基础振动,如图1所示,分别是:1)垂直方向的基础振动,即沿y轴方向的振动;2)俯仰方向的基础振动,即绕z轴方向的振动;3)摇摆方向的基础振动,即绕x轴方向的振动。图1中,oxy表示固定在框架结构上的局部坐标系。
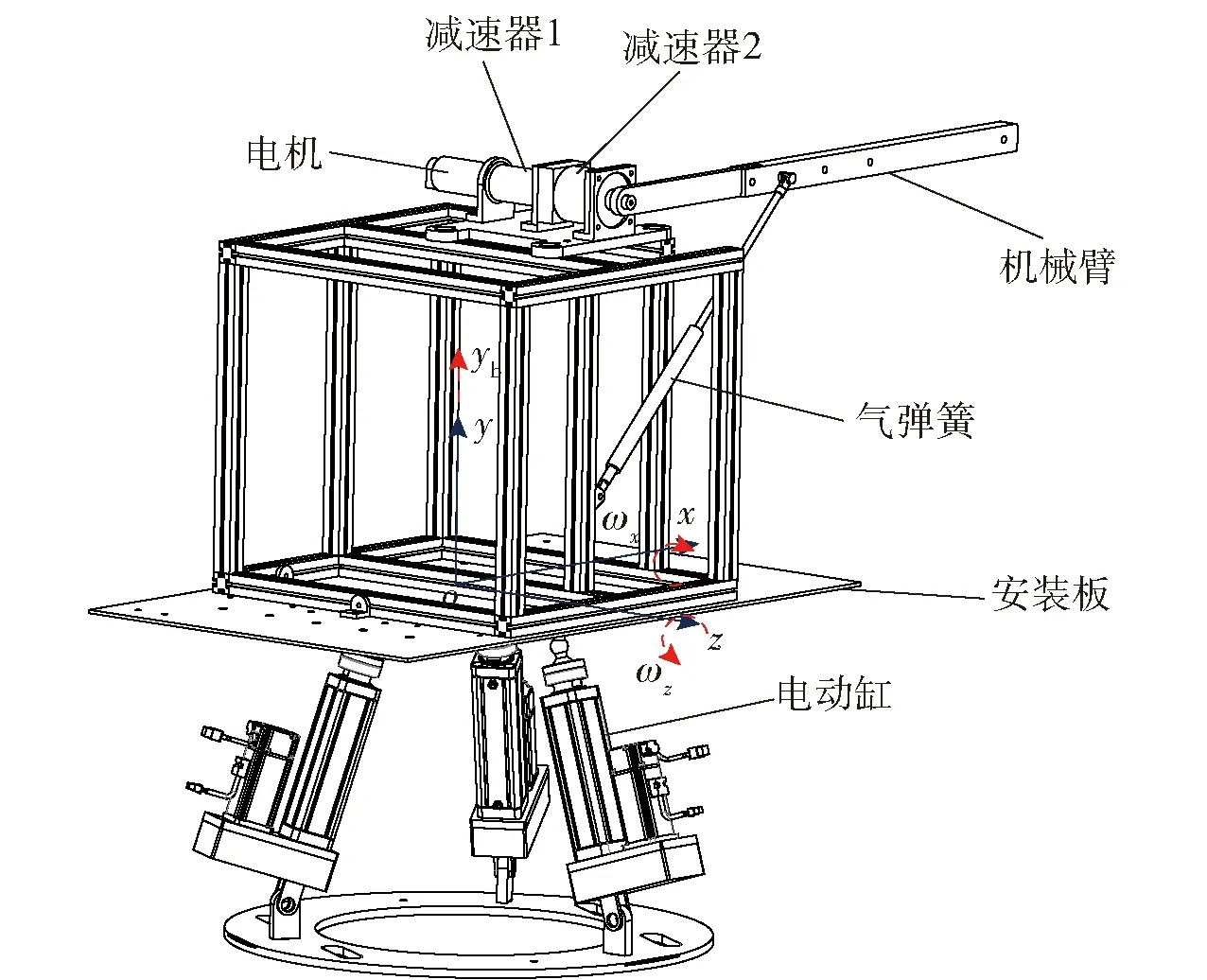
图1 振动基机械臂三维模型Fig.1 3D model of robotic manipulator with base vibration
机械臂是在oxy平面内相对减速器输出轴转动,由于同时考虑3个方向振动会带来建模上的极大困难,本文在对机械臂的运动控制问题研究中,主要考虑垂直和俯仰两个方向的基础振动,这是符合火炮武器系统停止间射击工况的。将机械臂系统简化为在oxy平面内运动的动力学模型,如图2所示。图2中:OXY为全局笛卡尔坐标系;G0、Ga、Gp分别表示安装基础、机械臂、安装在机械臂末端的负载质心;Op为机械臂的转动中心;yb和θb分别为基础的垂直和俯仰振动位移;θ为机械臂的角位移;φ表示负载质心与Op点连线相对于机械臂中心线的角度;L0、La、Lp和H分别表示图示几何尺寸。
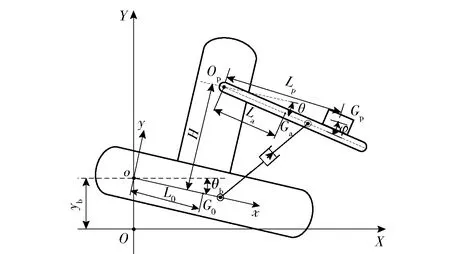
图2 振动基机械臂简化模型Fig.2 Simplified model of robotic manipulator with base vibration
由第二类Lagrange方程,建立机械臂系统的动力学方程为
(1)

气弹簧的平衡力矩MR取决于气弹簧活塞缸的压力以及机械臂的转角,具体表达式为
MR=LRp0Sp[V0/(V0-ΔLSp)]n,
(2)
式中:LR为气弹簧平衡力矩的力臂;p0为活塞缸的初始压强;Sp为活塞面积;V0为气体初始容积;ΔL为活塞移动距离;n为气体多变指数。其中,Sp、V0为已知量,LR、ΔL与机械臂的角位移相关,可以根据系统的基本几何尺寸以及机械臂在运动过程中的位置角度关系求得。
基础扰动项Sd的表达式为

(3)

2 控制器设计


图3 控制器总体设计思路Fig.3 Overall design of controller
2.1 非线性连续时变反馈控制律设计
为方便控制器的设计以及稳定性证明,记S=MG-MR-Mf+Sd为系统的复合扰动项,记广义坐标q=θ,则系统的动力学方程(1)式重新整理成如下形式:
(4)
方程(4)式存在如下性质:
1)等效转动惯量Je有界,即
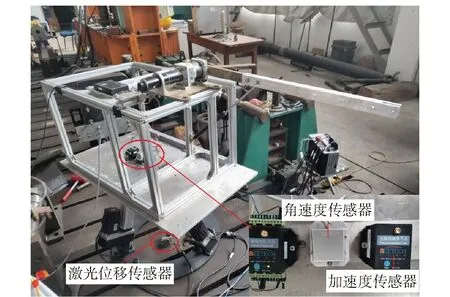
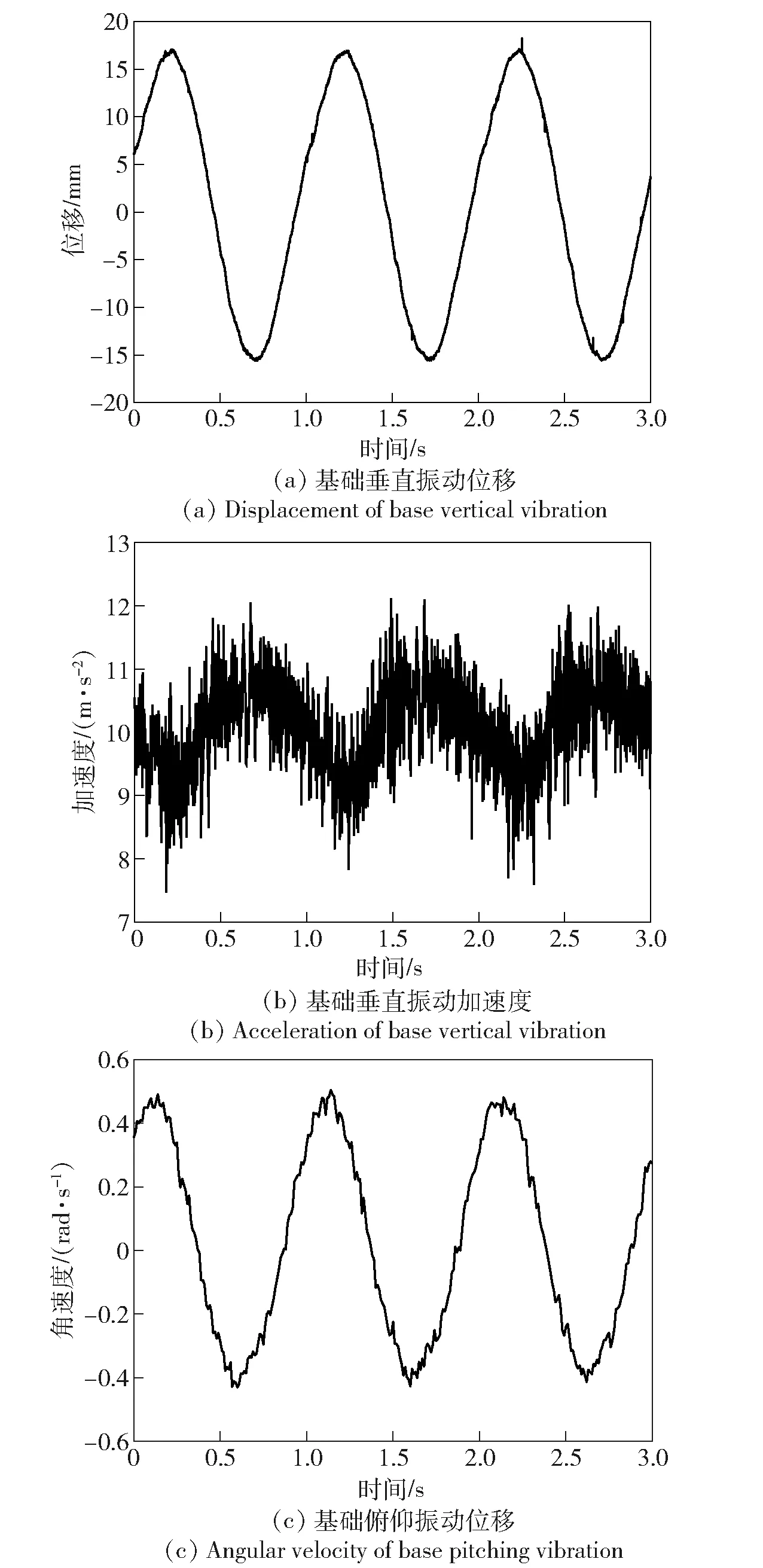
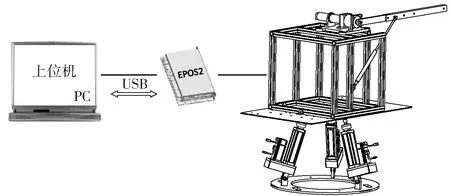
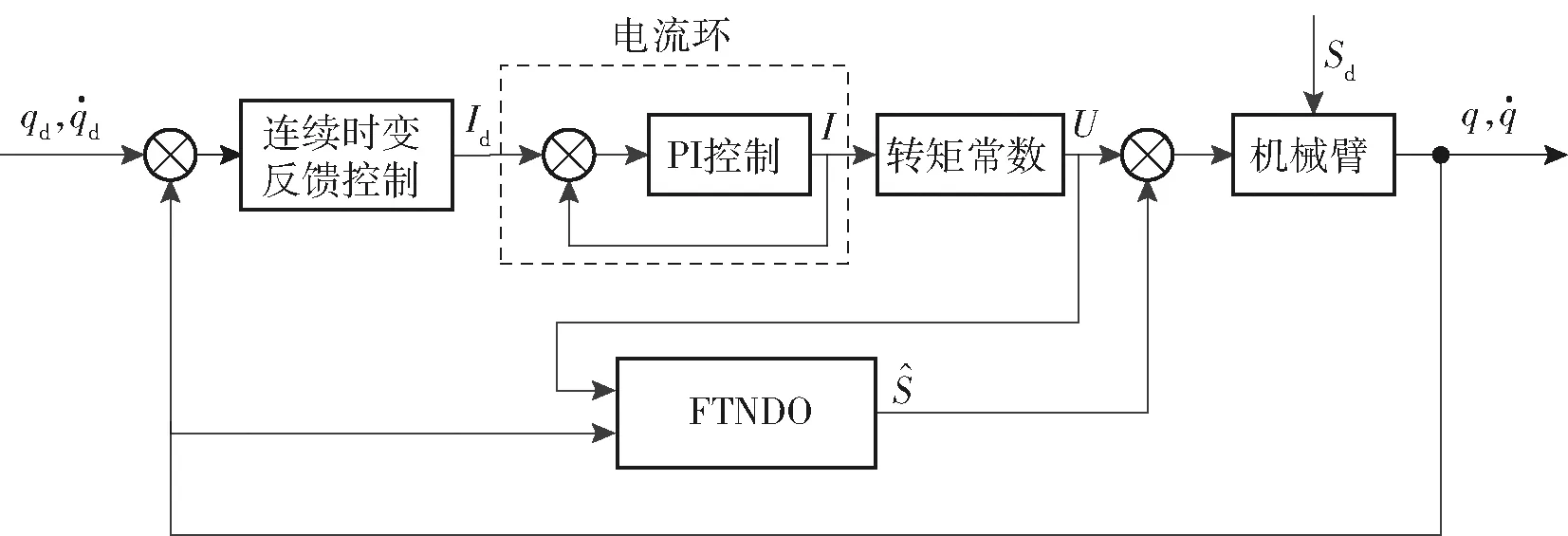
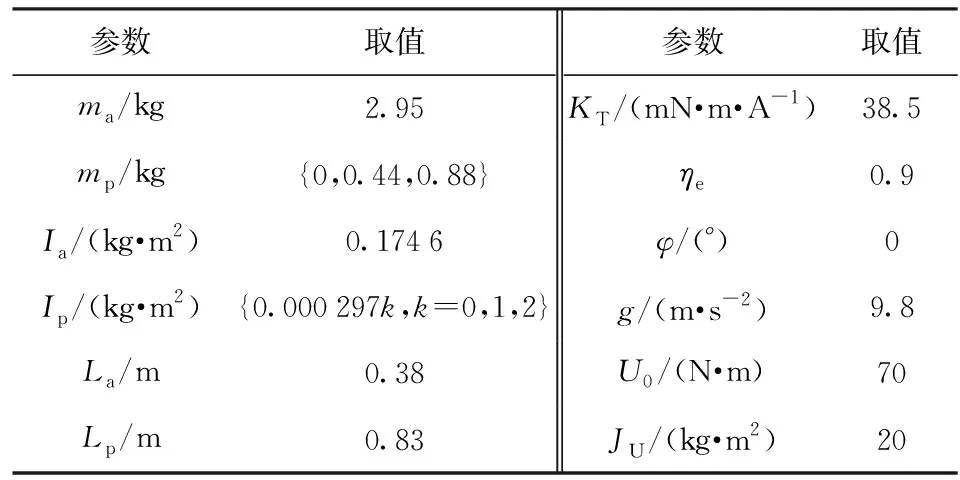
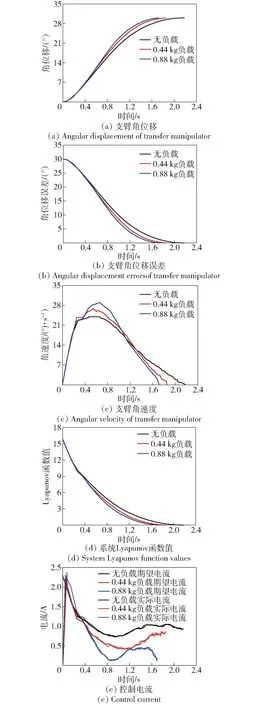
JL≤Je≤JU, 0 (5) 式中:JL、JU分别为等效转动惯量的上界和下界。 2)由重力矩、平衡力矩、摩擦力矩以及基础扰动项组成的复合扰动项大小有界,即 |S|≤S0, (6) 式中:S0为正常数,表示复合扰动的上界。 此外,基于实际工程应用的考虑,假设(4)式中的控制力矩也是大小有界的,即|U|≤U0,其中U0>0 N·m. (7) 式中:kd、kp为控制律增益, (8) (9) (10) 上述控制系统的稳定性证明过程如下。 首先,引入如下变量: (11) ξ2+γ2>0. (12) 此外,根据柯西不等式,有 (13) 即 |η|≤ξγ. (14) (8)式、(9)式和(11)式代入(10)式,可以得到方程: 16x4-ξ2x2-ηx-γ2=0. (15) 对于一元四次方程(15)式,有如下定理: 定理1满足(12)式和(14)式的方程f(x)=16x4-ξ2x2-ηx-γ2,总存在1个重数为1的正实根。 (16) 联立(10)式和(16)式,可得 (17) (18) 式中: (19) (20) (21) (7)式、(19)式~(21)式代入(18)式,可得 (22) 进一步化解(22)式,可得 (23) 式中: (24) 根据柯西不等式与(5)式,可得 床式下肢康复训练机器人的控制系统框图如图2所示,分为上位机、下位机和康复训练机器人本体3部分,其中康复训练机器人本体包括多连杆式下肢康复训练器和机器人感知模块2部分。 (25) 根据(6)式与(25)式,可得 (26) (26)式代入(23)式,可得 (27) (28) (29) (30) (31) 为解决这一问题,本文引入干扰观测器来消除系统扰动带来的非线性影响。根据文献[13-15],对于如下非线性2阶系统: (32) 式中:x(t)∈R,f(x,t)∈R分别为已知的状态和变量;g(x,t)∈R为有界未知干扰。存在FTNDO: (33) 式中:z0、z1、z2为观测器状态变量,z1为干扰g(x,t)的估计;σ0、σ1为中间变量;λ0、λ1、λ2为观测器增益;L为利普希茨常数。文献[13]证明了对于2阶系统,当观测器增益取值为λ0=2,λ1=1.5,λ2=1.1时,z1可以在有限时间内收敛到g(x,t)。 (34) 本文研究的弹药传输机械臂原型定位精度要求是0.3°. 为验证所设计的基于FTNDO非线性干扰补偿的连续时变反馈控制算法有效性,同时验证FTNDO干扰补偿对于系统控制性能的改善,设定不同工况对机械臂系统进行实验研究。实验分为3组:第1组考虑在同一种负载工况下,基于观测器的扰动补偿对控制性能的影响,即做无干扰补偿和有干扰补偿情况下的对比实验;第2组实验和第3组实验分别在没有干扰补偿和有干扰补偿情况下,考虑负载变化对控制性能的影响,在这两组实验中施加负载的情况为:1)无负载;2)机械臂末端加1个负载质量块,质量为0.44 kg;3)机械臂末端加2个负载质量块,质量为0.88 kg. 实验前,首先调定振动台的振动工况,使得振动台在垂直和俯仰两个方向产生振动,然后对振动工况进行测试,测试时传感器安装如图4所示。 图4 振动台测试传感器安装示意图Fig.4 Sensor installation in base vibration test 图5给出了振动台的振动测试曲线,其中:图5(a)为基础垂直振动位移曲线,幅值为32.6 mm;图5(b)为基础垂直振动加速度曲线,幅值为4 m/s2;图5(c)为基础俯仰方向振动角速度曲线,幅值为0.92 rad/s. 图5 基础振动工况Fig.5 Base vibration condition 图6所示为控制系统组成,机械臂由一个直流电机驱动,电机型号为瑞士Maxon-RE50,控制器选用与Maxon电机配套的EPOS2数字位置控制器,该控制器通过USB连接到上位机(PC),以此传输通信数据并执行控制指令。 系统的具体控制流程如图7所示,Maxon电机自带位置控制模式、速度控制模式、电流控制模式等一系列模块化控制策略,其基本原理为三环控制,其中电流环采用比例积分(PI)控制,可以单独使用。本实验中采用电机的电流控制模式,即采用系统内嵌的PI控制作为电流环,而位置控制环则采用本文设计的连续时变反馈控制方法。此外,根据FTNDO观测值进行扰动补偿,以克服包括系统重力、气弹簧平衡力矩、摩擦力矩以及基础扰动项在内的复合非线性扰动。 图6 控制系统组成Fig.6 Composition of control system 图7 系统控制框图Fig.7 Control block diagram of robotic manipulator system 表1 系统参数及控制参数Tab.1 Values of system parameters and control parameters 第1组实验以无负载为例,给出对比结果,如图8所示。 图8给出了第1组实验中支臂的运动响应曲线,其中:图8(a)是支臂的角位移曲线,图8(b)是角位移误差曲线,图8(c)是支臂的角速度曲线,图8(d)是控制过程中系统的Lyapunov函数值,图8(e)是控制电流。图8(a)中红色曲线在0.55 s处有一处小波动,这是因为经前期响应,支臂角速度和位置都发生了改变,相应地,系统摩擦力矩和气弹簧平衡力矩都有所增加,而系统控制电流有所降低,同时FTNDO的扰动补偿力矩也有改变,这就使得支臂的角加速度和角速度发生改变,累积到位移上就表现为位移曲线的小波动。尽管如此,位移波动处仍是单调递增的,并未发生振荡,对整体控制效果几乎没有影响。 图8 第1组实验工况下支臂的运动响应Fig.8 Motion responses of transfer manipulator in the first experimental group 图8中的对比结果表明,在没有补偿和有补偿两种控制下,定位精度都可以达到0.05°以内,均满足精度要求。而在没有补偿情况下,系统运动到位所需要的时间是2.181 s,对比之下,在有补偿情况下所需要的时间仅为1.321 s,缩短了39.4%,表明基于干扰观测器的扰动补偿可以有效地提高控制系统的动态响应速度,从而显著地提高了系统的工作效率。 第2组和第3组实验用于验证在没有扰动补偿和有扰动补偿情况下本文控制方法对负载不确定性的鲁棒性,同时这两组实验之间也形成一个对比,用以表明扰动补偿对于存在负载变化的系统控制性能的保证与提升。 第2组实验结果如图9所示。 图9 第2组实验工况下支臂的运动响应Fig.9 Motion responses of transfer manipulator in the second experimental group 图9给出了第2组实验中支臂的运动响应曲线。由图9可见,在3种负载情况下,系统收敛到目标状态所需要的时间分别是2.181 s、1.853 s和1.719 s,负载越大所需的到位时间越短,运动过程中支臂的角速度也越大,而电机的控制电流越小。这是因为在系统运动过程中,重力始终做正功,这一点在系统动力学方程(1)式中体现为重力矩项和电机驱动力矩项符号相同,即力矩方向相同。即便运动过程有所差异,本组实验仍然表明在没有加干扰补偿情况下,本文所设计非线性连续时变反馈控制方法也可以克服负载不确定性的影响,达到系统的控制目标,同时满足控制精度的要求。 第3组实验结果如图10所示。 图10 第3组实验工况下支臂的运动响应Fig.10 Motion responses of transfer manipulator in the third experimental group 与第2组实验类似,第3组实验是在有干扰补偿情况下改变负载工况,测试系统的运动响应。从图10中的实验结果可以看出,本组实验中,在不同负载下系统运动到位的时间分别为1.321 s、1.323 s、1.326 s,只在毫秒位有所差异,与第2组实验相比,差异几乎可以忽略不计,由此表明基于干扰观测器的扰动补偿极大地提高了系统稳定性,这一点对于工程中对流程和时序分配严格的系统而言意义是重大的,具有现实指导意义。 上述3组实验结果通过在同一工况下有无补偿的直接对比、有无补偿下不同负载的直接对比以及组与组之间补偿带来的影响对比,共同验证了本文基于观测器的干扰补偿可以有效地消除由基础扰动和负载不确定性带来的非线性因素影响,显著提高控制系统的性能。相应地,对于实际弹药协调器系统而言,这就意味着本文方法可以有效地解决协调器提高协调速度的问题以及在不同带弹情况下的精确定位控制问题,满足整个弹药装填系统动作时序设计要求,具有重要的工程指导意义。 本文通过实验用机械臂台架研究某种复杂非线性弹药协调器在基础扰动和负载不确定条件下的位置控制问题。首先通过第2类Lagrange方程建立了系统的动力学模型,然后将模型中系统的重力项、气弹簧平衡力矩项、系统摩擦和基础振动干扰项统一考虑为系统外干扰,采用一种基于隐式Lyapunov函数的连续时变反馈控制算法设计了机械臂定位控制方案,该控制方案从形式上来看类似于PD控制方法,但其中比例和微分系数取决于系统的Lyapunov函数,是连续时变的。为消除前述复合扰动给系统带来的不确定性和非线性,以提高控制系统性能,基于一种FTNDO的扰动观测结果设计了相应的补偿环节。 对比实验结果表明,本文提出的基于观测器扰动补偿的非线性连续时变反馈控制方案可以有效克服系统基础扰动和负载不确定性的影响,在保证控制精度的前提下,稳定、高效地完成控制目标,具有较强的工程实践性,为存在基础扰动和负载不确定的非线性弹药协调器定位控制问题提供了一种可行的控制方案。

2.2 干扰观测器设计


3 实验验证与分析


4 结论
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
上海师范大学学报·自然科学版(2022年3期)2022-07-11
舰船科学技术(2022年10期)2022-06-17
轻兵器(2022年4期)2022-04-25
汽车实用技术(2022年5期)2022-04-02
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2020年10期)2020-11-14
弹箭与制导学报(2020年3期)2020-11-11
航空发动机(2020年3期)2020-07-24
