
线路曲线点位测设数据计算软件设计与开发
2021-01-08 11:40周命端张文尧王宾宾马博泓
测绘工程 2021年1期
周命端,王 淼,张文尧,王宾宾,马博泓
(1.北京建筑大学 测绘与城市空间信息学院,北京 102616;2.北京建筑大学 土木与交通工程学院,北京 102616;3.陕西铁道工程勘察有限公司,陕西 西安 221116)
圆曲线是平面线形中常用的线性要素,公路或铁路不论转角大小均需设计圆曲线。交通载体从直线进入圆曲线时,驾驶员应逐渐改变转向角,从直线过渡到圆曲线。交通载体在曲线行驶的曲率可能是不断变化的,为适应这一曲率变化还需设置缓和曲线。另外,纵断面设计中心线可由许多不同坡度的坡段构成竖曲线。无论是圆曲线、缓和曲线还是竖曲线,针对单一曲线的点位测设数据计算较为简单。仝海飚以Visual C++6.0为开发平台,设计开发了道路缓和曲线坐标法测设软件[1];纪凯利用Excel的表格特性进行缓和曲线中桩坐标计算[2];张帅帅等人利用VB与Matlab设计实现缓和曲线坐标计算程序[3];郭有宝利用学生函数计算器快速计算缓和曲线测设数据[4-5]。然而,在实际线路设计中往往是多种类曲线复杂组合,现有工具软件难以满足这种组合的点位测设数据计算。本文基于VS2010开发平台,利用C#编程语言,设计开发一种适用于多种类曲线组合的点位测设数据计算软件(LPLS),并给出软件设计与开发的程序实现流程图,对提高线路曲线的点位测设数据计算工作效率具有重要的现实意义和实用价值。
1 点位测设数据计算模型
1.1 圆曲线坐标测设计算
圆曲线坐标测设计算原理[6-8]如图1所示。假设M是圆曲线上任意点,其在施工坐标系下的坐标计算步骤为:

图1 圆曲线坐标测设计算原理
1)计算圆心O的坐标。首先计算ZY点到YZ点的坐标方位角:
(1)
然后,计算ZY点到YZ点劣弧所对应的圆心角:
(2)
由式(2),可以求得β角:
(3)
根据式(1)和式(3),求得ZY点到O点的坐标方位角:
αZY→O=αZY→YZ+β.
(4)
根据坐标正算公式,计算圆心O的坐标:

(5)
2)计算圆心O到ZY点的坐标方位角:
αO→ZY=αZY→O-180°.
(6)
3)计算圆心O到圆曲线上任意点M的坐标方位角。首先计算ZY点到M点的弧长lM:
lM=LM-LZY.
(7)
式中:LM为M点的里程;LZY为ZY点的里程。其次,计算ZY点到M点,劣弧所对应的圆心角:
(8)
根据式(6)和式(8),求得圆点O点到M点的坐标方位角:
αO→M=αO→ZY+θM.
(9)
4)计算M点的桩点坐标。根据式(9)以及坐标正算公式,计算M点的坐标:
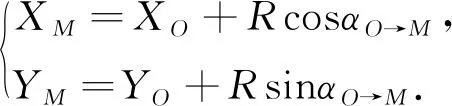
(10)
1.2 带缓和曲线的圆曲线坐标测设计算
带缓和曲线的圆曲线坐标测设计算原理[6-8]如图2所示。
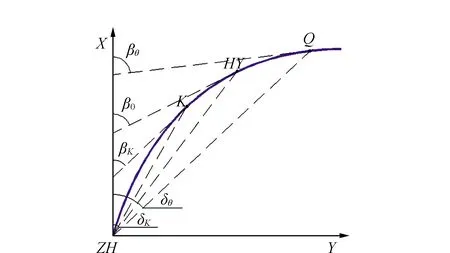
图2 带缓和曲线的圆曲线坐标测设计算原理
在图2所示的独立坐标系下,假如K是缓和曲线段上任意点,其在施工坐标系下的坐标计算步骤为:
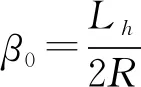
1)计算K点的切线角βK和K点的偏角δK:
(11)
(12)
式中:LK是K点到ZH点的弧长,Lh是缓和曲线长度,R为圆曲线半径。
2)计算K点到ZH点的偏角:
αK=αZH→JD+δK.
(13)
3)计算K点到ZH点的弦长Ck:
(14)
其中,K点坐标
4)计算K点在施工坐标系下的桩点坐标。根据式(13)和(14)以及坐标正算公式,计算K点在施工坐标系下的坐标:

(15)
另一方面,在图2所示的独立坐标系下,若Q点是在带缓和曲线的圆曲线上的任意点,其在施工坐标系下的坐标计算步骤为:
1)计算Q点的切线方位角:
(16)
2)计算缓和曲线切线增值q和圆曲线的内移值ΔR:
(17)
(18)
3)由式(16)~(18)可得到独立坐标系下Q点的坐标:

(19)
4)根据式(19)计算Q点到ZH点的偏角和Q点到ZH点的弧长:
αQ=αZH→JD+δQ,
(20)
(21)
5)根据式(20)、式(21)可计算得到施工坐标系下Q点的坐标:

(22)
1.3 竖曲线高程测设计算
竖曲线高程测设计算原理[6-8]如图3所示。假设V是竖曲线上任意点,其设计高程计算步骤为:
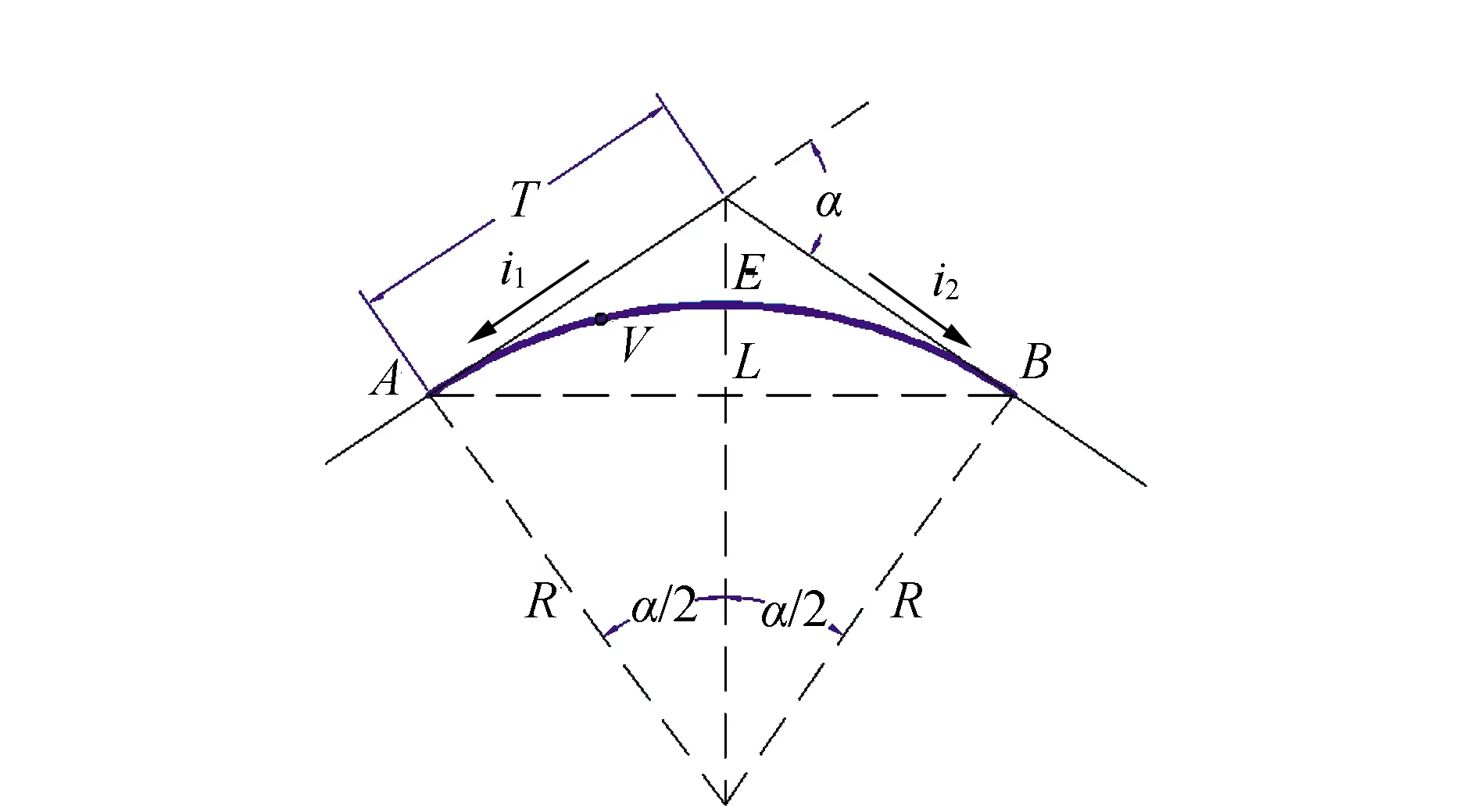
图3 竖曲线高程测设计算原理
1)计算竖曲线的基本要素:曲折角α、竖曲线切线长T、竖曲线长度L和竖曲线外矢径E,计算式所示:
(23)
2)计算起、终点的里程:
(24)
式中:MO为竖曲线起点里程;M变为变坡点里程;MD是竖曲线终点里程。
3)计算坡度线上任意点的切线高程:
(25)
dV=MV-MO,

4)计算竖曲线各点与对应切线各点的高程之差h:
(26)
5)根据式(25)、式(26)计算竖曲线任意点V的设计高程:
(27)

2 软件设计与实现
根据推导的点位测设数据计算模型,包括圆曲线坐标测设计算、带缓和曲线的圆曲线坐标测设计算和竖曲线高程测设计算,本文基于VS2010开发平台,设计开发了线路曲线点位测设数据计算软件(LPLS)。LPLS软件主界面设计如图4所示。
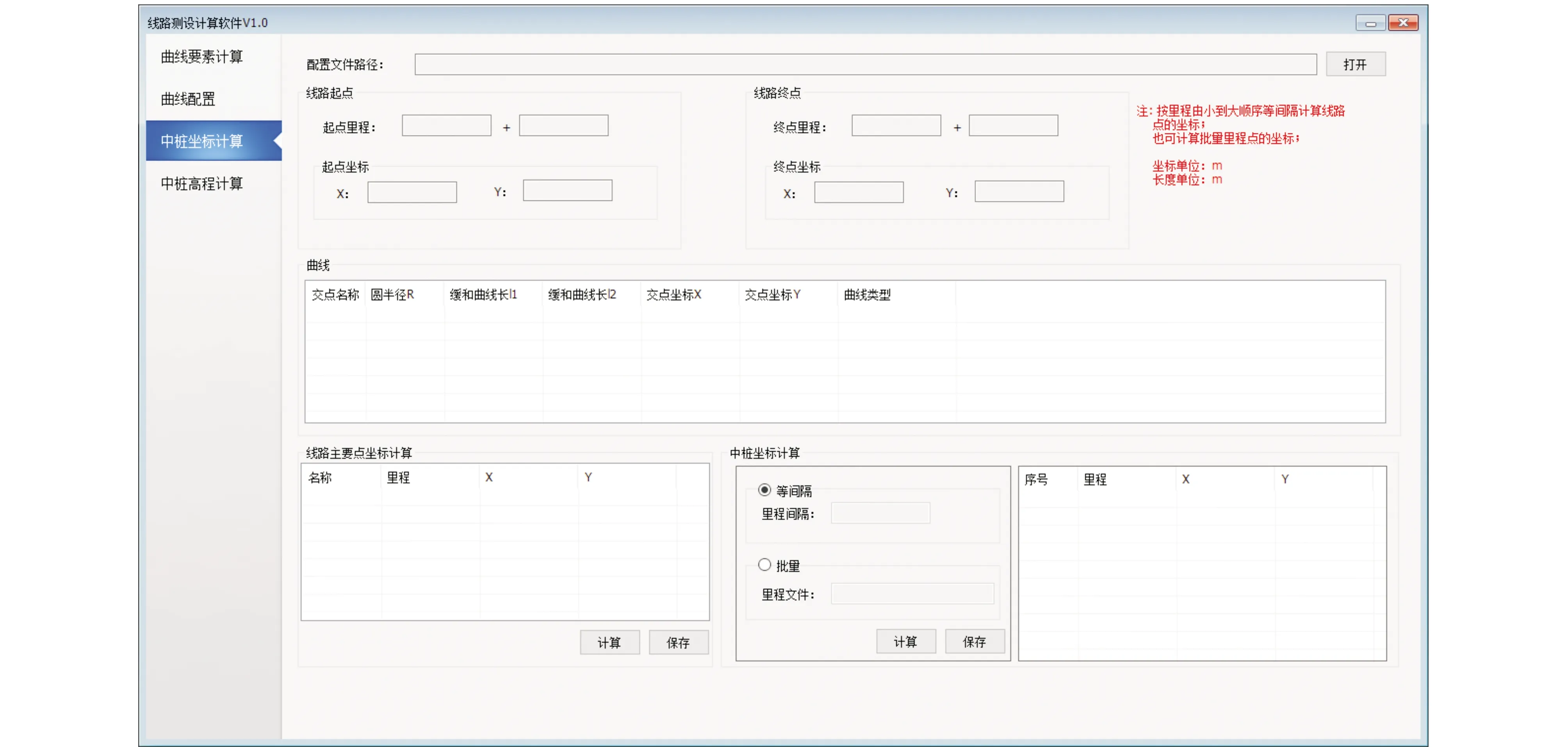
图4 LPLS软件主界面设计
利用C#编程语言,建立主要的程序模块,包括曲线要素计算模块、曲线配置模块、中桩坐标计算模块和中桩高程计算模块。LPLS软件主要程序模块结构如图5所示。

图5 LPLS软件主要程序模块结构
如图5所示,曲线要素计算模块主要包括曲线长、切线长和切曲差的计算功能实现;曲线配置模块主要由路线起、终坐标及里程、交点坐标及里程和圆曲线半径及缓和曲线长度完成曲线配置;中桩坐标计算模块是根据曲线要素计算模块和曲线配置模块实现线路主点坐标、线路中桩坐标的计算功能;竖曲线高程计算模块可以实现线路中桩设计高程的计算功能。其中,中桩坐标计算程序模块和中桩高程计算程序模块是LPLS软件的主要核心模块,中桩坐标计算程序模块实现流程图如图6所示,中桩高程计算程序模块实现流程图如图7所示。
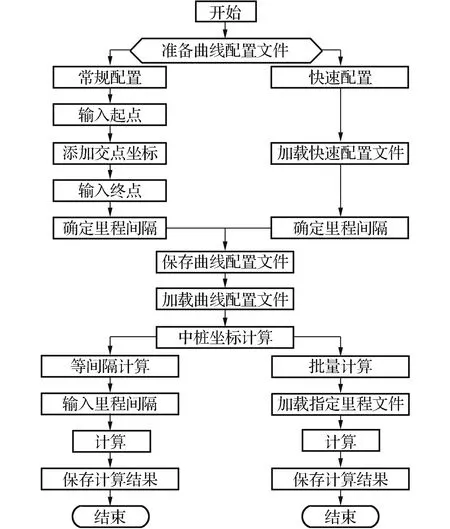
图6 中桩坐标计算程序模块实现流程
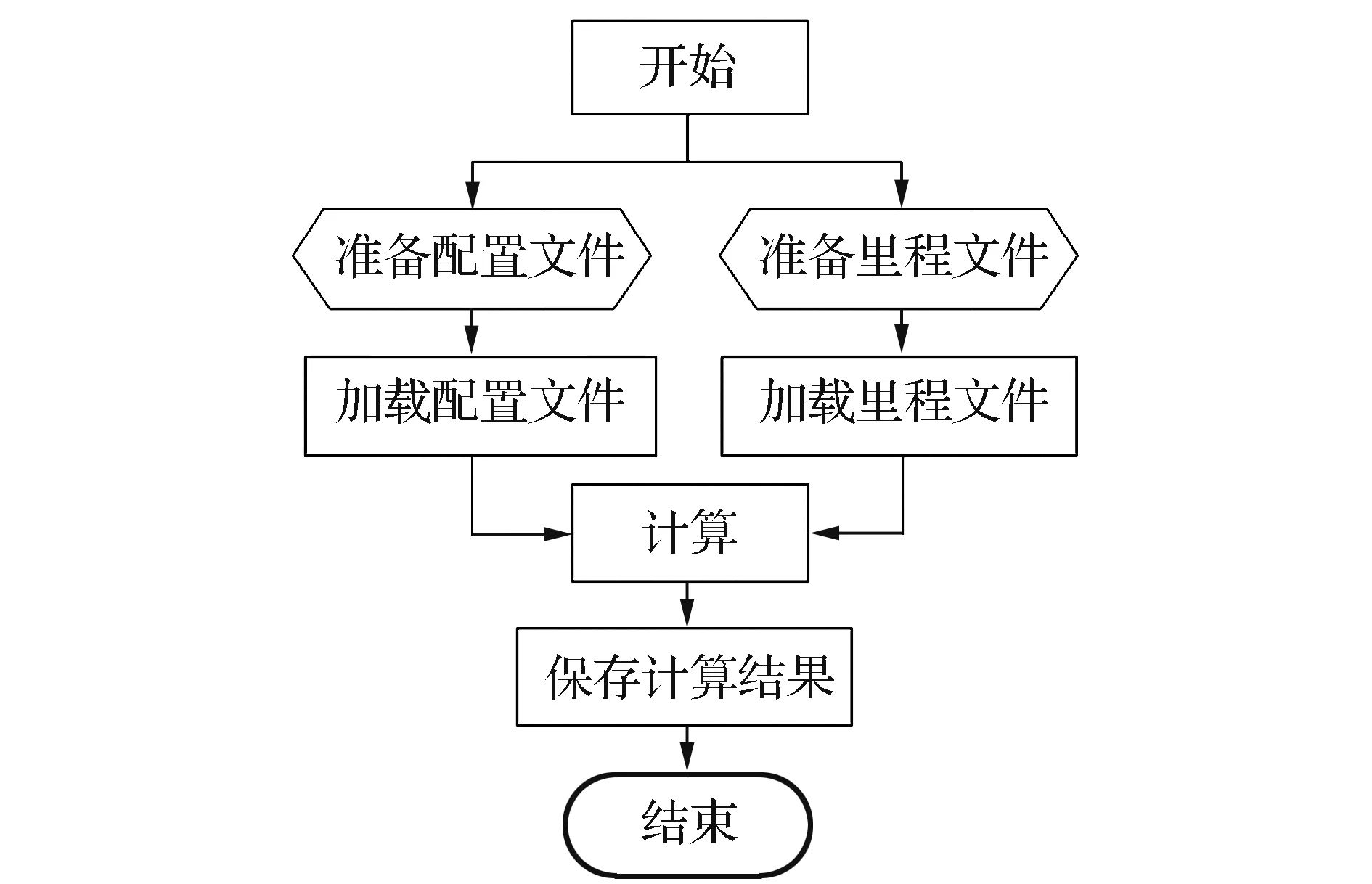
图7 中桩高程计算程序模块实现流程
3 算例验证
为验证与分析点位测设数据计算模型及程序功能模块的正确性和有效性,本文选取铁道工程的某工段里程的中桩点位测设数据进行算例验证。
3.1 坐标计算
根据坐标计算式及计算步骤,基于VS2010开发平台,利用C#编程语言,建立线路曲线平面坐标计算功能模块(LPLS_H),基于LPLS软件计算获得DK6+813~DK9+430工段的每公里里程间隔的中桩平面坐标计算结果,如图8所示。
图8 中桩平面坐标计算结果
如图8所示,为验证LPLS软件计算中桩平面坐标的正确性,本文截取包含缓和曲线、圆曲线等五段曲线段的随机选取的里程点进行手工验证计算,将手工验证计算结果与LPLS软件计算结果进行比较,手工计算结果减去LPLS软件计算结果的较差统计表见表1所示。
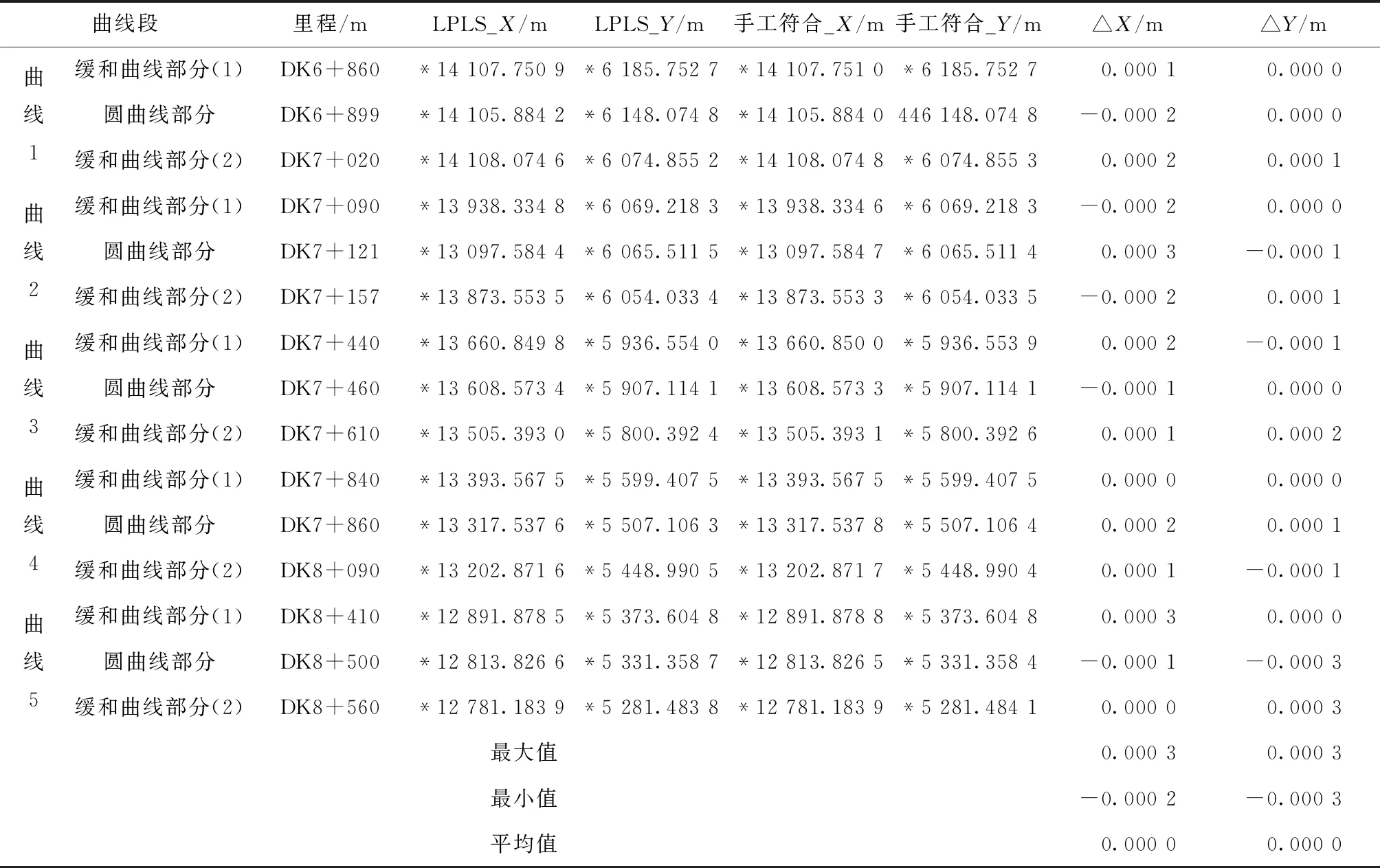
表1 手工计算与LPLS的较差统计表
从表1可以看出,利用本文开发的LPLS软件计算所截取五段曲线上的里程点中桩平面坐标结果与手工验证计算结果是一致的(忽略手工计算的取位误差)。这说明,本文建立的LPLS_H程序模块是正确的且有效的。
3.2 高程计算
根据高程计算式及计算步骤,基于VS2010开发平台,利用C#编程语言,建立线路曲线高程计算功能模块(LPLS_V),基于LPLS软件计算获得DK503+500~DK504+436工段的中桩高程计算结果,如图9所示。
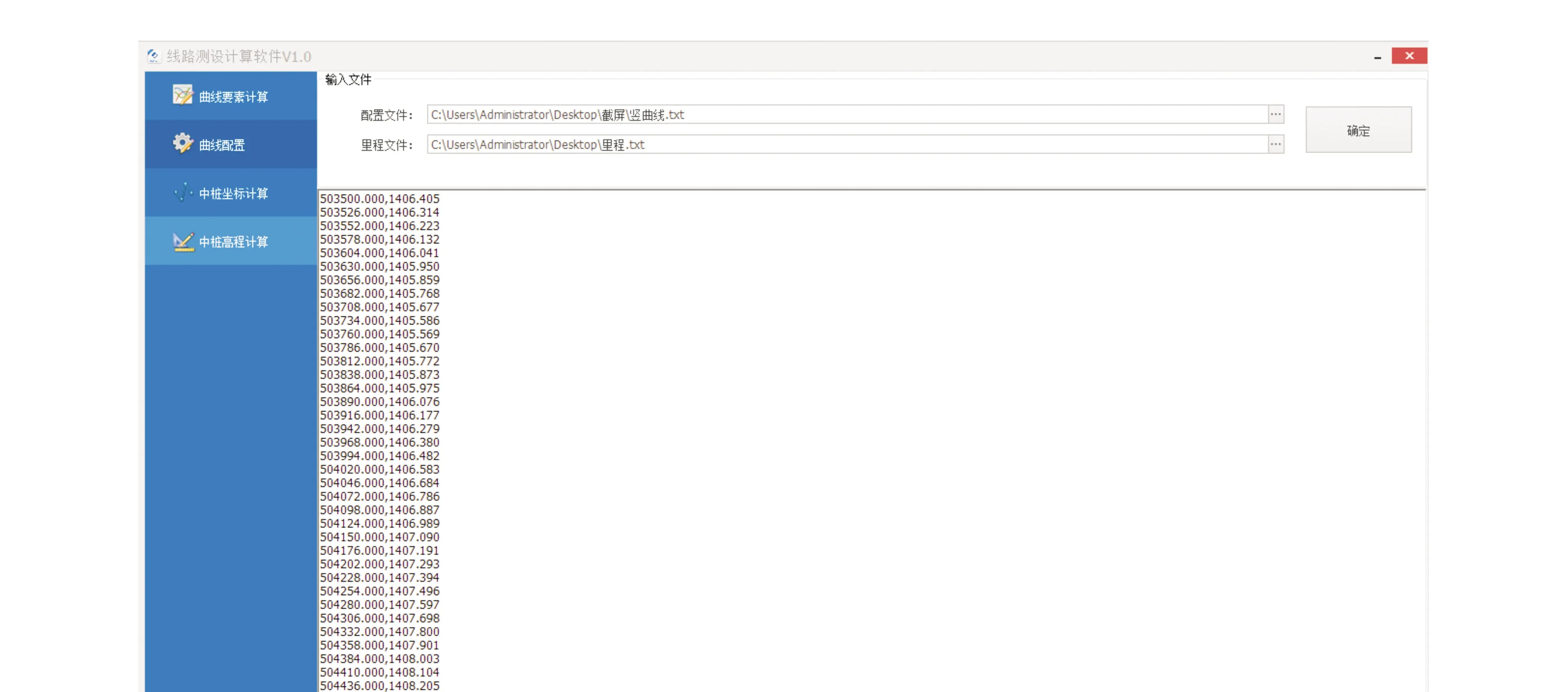
图9 中桩高程计算结果
如图9所示,为验证LPLS软件计算中桩高程结果的正确性,本文截取变坡点1的里程DK503+750,高程为1405.530 m,半径为50 000 m,变坡点2的里程DK504+450,高程为1 408.260 m,半径为50 000 m,变坡点3的里程DK505+980,高程为1 408.72 m,半径为80 000 m的已知数据进行手工验证计算,任意选取7个里程点进行作较差分析,手工计算结果减去LPLS软件计算结果的较差统计表见表2所示。

表2 手工计算与LPLS的较差统计表 m
从表2可以看出,利用本文开发的LPLS软件计算竖曲线上任意选取的7个里程点中桩高程计算结果与手工验证计算结果是一致的。这说明,本文建立的LPLS_V程序模块是正确的且有效的。
4 结束语
鉴于线路设计往往是多种类曲线复杂组合,现有工具软件难以满足这种组合的点位测设数据计算,本文首先分别推导了圆曲线坐标测设计算模型、带缓和曲线的圆曲线坐标测设计算模型和竖曲线高程测设计算模型,并利用C#编程语言建立相应的程序模块(LPLS_H和LPLS_V),基于VS2010开发平台,设计并开发一种适用于多种类曲线组合的点位测设数据计算软件(LPLS)。通过某铁道工程实例的计算验证,对LPLS软件的功能模块的正确性做验证,实现了线路曲线坐标及高程测设数据计算。本文所设计开发的LPLS软件,可用于公路、铁路等线路工程的多种类曲线组合的中桩点位测设数据计算,对提高线路工程的施工放样和纵断面设计工作效率具有重要意义和实用价值。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
三门峡职业技术学院学报(2020年1期)2020-05-20
制造技术与机床(2018年12期)2018-12-23
建材与装饰(2018年21期)2018-05-23
证券市场红周刊(2018年37期)2018-05-14
车迷(2017年12期)2018-01-18
中国宝玉石(2017年2期)2017-05-25
中国宝玉石(2017年1期)2017-03-24
测绘科学与工程(2016年4期)2016-04-17
安徽建筑(2015年5期)2015-11-27
