
车载综合电力系统大信号失稳预测
2021-01-12 02:53刘春光魏曙光
兵器装备工程学报 2020年12期
高 强,袁 东,刘春光,魏曙光
(陆军装甲兵学院 兵器与控制系, 北京 100072)
新型轮式电传动装甲车电力系统是由分布式电源、变换器和负载组成的小型发配电系统,称为车载综合电力系统[1-2]。与以往大电网、小型输配电站以及舰载电力系统不同,车载综合电力系统只能工作于离网(孤岛)模式,且负载、变流器数量种类多,系统非线性强,表现为“弱惯性”系统[3-4]。
系统负载尤其是电机等属于恒功率负载(Constant power load,CPL),其“负阻抗”特性可使系统受到干扰时逐渐远离稳态工作点,导致系统濒临崩溃[5];再者变流器的控制参数如果选取不当会导致母线电压低频振荡、电源噪声大、能量转换效率低等问题;车辆启动、刹车、加/减速模式快速切换,对电力系统表现为瞬间突加/卸负载,如不能快速响应势必造成母线电压失稳,从而使车内精密设备无法正常运行[6-8]。然而电机功率突变多少、变换器参数取值如何才会导致系统失稳仍然未知。因此,进行此类电力系统的稳定边界研究至关重要。
文献[9-10]基于系统的小信号线性模型,分别采用等效环路增益法、阻抗禁止区法等进行系统分析,从理论上分析了部分参数对系统稳定性的影响。文献[11]使用Lyapunuov间接法,通过判断系统矩阵的特征值是否在单位圆内来评价系统的稳定性,给出了系统稳定条件。以上方法都在一定程度上保证了系统的稳定运行,取得良好效果。但对于车载综合电力系统来说,存在输入电压波动或者大功率负载投切等大信号扰动,传统的基于稳态工作点的小信号稳定性分析已不能保证系统的稳定性,为此需进行大信号稳定性分析。大信号稳定分析也是基于某一平衡状态,但旨在确定该平衡状态的吸引域大小,确定系统在大信号扰动下的失稳边界。
本文以某型8*8轮式装甲车车载综合电力系统为基础,建立了静音行驶模式下系统的大信号模型,利用混合式函数理论推导了系统稳定域。据此探究了DC/DC变换器电压外环控制器比例系数、电机负载突变功率对系统稳定域的影响规律,最后通过硬件在环仿真实验验证了该稳定域对系统失稳预测的正确性。
1 车载综合电力系统建模
某型8*8轮式电传动装甲车车载综合电力系统拓扑结构如图1所示,本文主要研究该车在静音行驶模式下系统失稳预测问题。在静音行驶时发动机—发电机组停止工作,系统由动力电池供电,负载主要为8个轮毂电机,拓扑结构如图1中虚线框内所示。
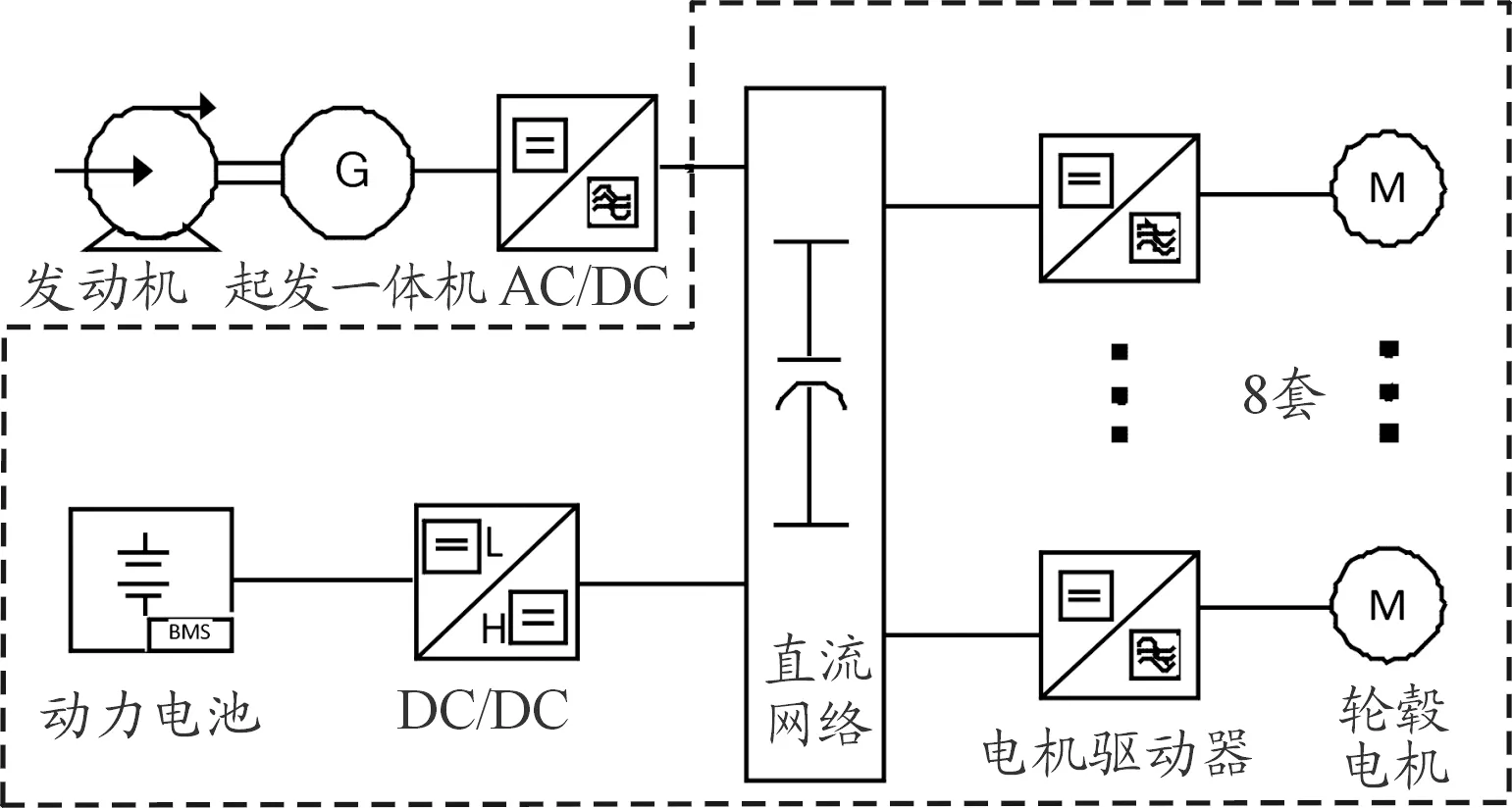
图1 静音行驶时车载电力系统拓扑结构
根据静音模式下系统拓扑结构,为方便后文分析,首先对DC/DC变换器、电机负载进行建模,从而建立系统的大信号模型。
1.1 DC/DC变换器大信号建模
由于存在IGBT高频通断使得DC/DC变换器呈现非线性,不便于分析。因此可将变换器视为输入/输出的二端口网络,根据功率守恒原理,利用回转器进行替代从而达到简化模型的目的,由此得到基于回转器的DC/DC变换器大信号模型[12]如图2所示。
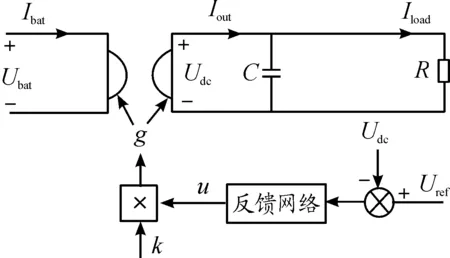
图2 DC/DC变换器大信号模型示意图
其中Ubat、Udc分别为电池电压与母线电压开关周期平均值,Ibat、Iout分别为电池电流与变换器输出电流开关周期平均值,Iload为稳态负载电流,Uref为电压反馈网络的参考电压,C为支撑电容,反馈网络与原变换器相同。
g为可调回转电导,由反馈网络的控制变量u和常数k的乘积组成,用于调节控制环饱和时变换器中的被控电流所能达到的最大值。由于回转器具有电压电流对偶转换的特性,则仅采用单环反馈配合回转器特性即实现电压、电流双环反馈的功能。
根据回转器特性有:
(1)
车辆行驶过程中DC/DC处于Boost工作模式,此时电路拓扑结构如图3所示。
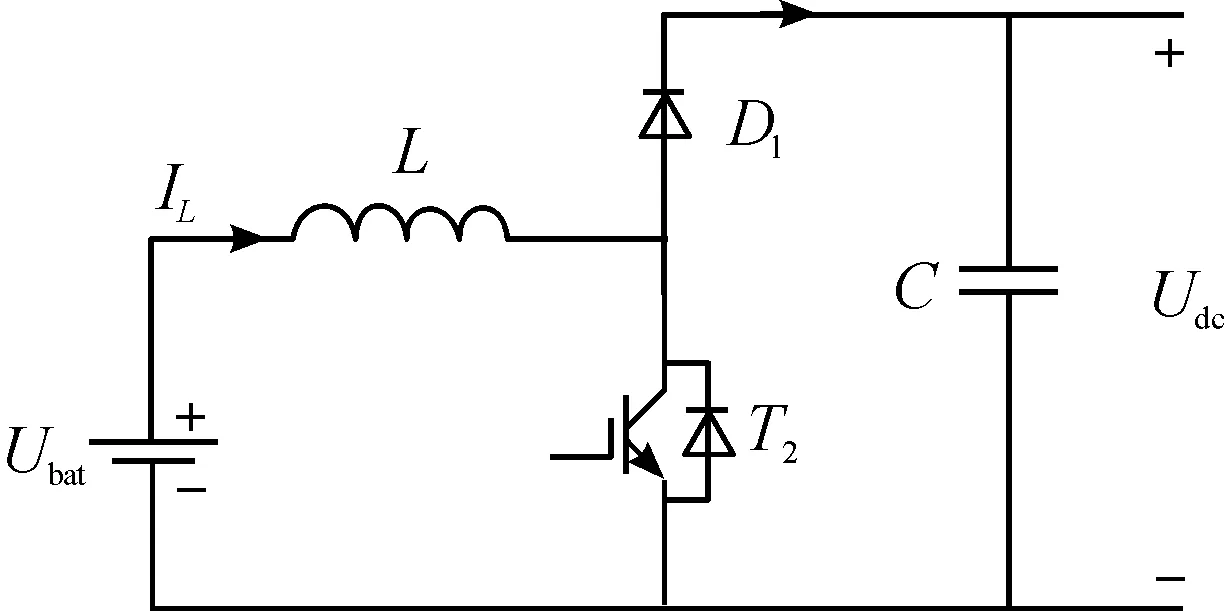
图3 DC/DC变换器Boost工作模式
该模式下,电池向母线供电,按上图定义流入电感电流为正方向,此时电感电流IL即为大信号模型的输入电流Iin,则
IL=Iin=Udc·g
(2)
又因g=u·k
其中,u为电压环的输出,即电流参考值Iref;系统稳态后有
Iin=Iref=u
(3)
因此
(4)
1.2 电机负载的大信号模型
轮毂电机驱动器采用闭环控制,且闭环响应速度远大于源变流器,因此可将电机控制器-轮毂电机负载等效为恒功率负载[13]。为了分析方便,认为车辆行驶过程中载荷平均,即8个电机状态一致。则电机负载大信号模型可以简化为图4。

图4 电机负载大信号模型
则负载总功率为
Pload=Iload·Udc=a(常数)
(5)
2 车载综合电力系统稳定域估计
2.1 基于混合势函数理论的系统稳定域估计
混合势函数理论主要用来分析非线性电力系统稳定性,通过建立系统能量函数,根据混合势理论的相关定理可判定系统能否稳定运行[14]。混合势函数形式为
P(i,v)=-A(i)+B(v)+iT·(γv-α)
(6)
式中:A(i)为电流势函数;B(v)为电压势函数;i为电感电流向量;v为电容电压向量;γ为常数矩阵;α为常向量。
根据回转器原理可将系统的大信号模型进一步简化为图5所示。

图5 简化的大信号模型
其中
(7)
可得系统中非储能元件电流势函数为:
(8)
超级电容支路电压电乘积为
(9)
则可得系统的混合势函数为:
(10)
对比式(6)与式(10)可得
(11)
则
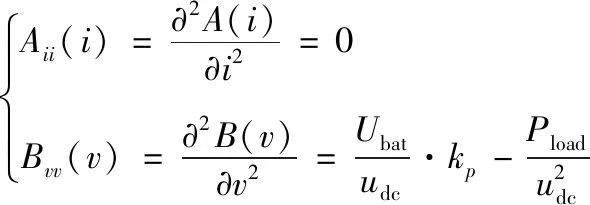
(12)

根据混合势函数理论第三条稳定性定理[15],系统必须满足μ1+μ2>0,则系统的解将趋近于稳态工作点,因此可得系统的稳定域为
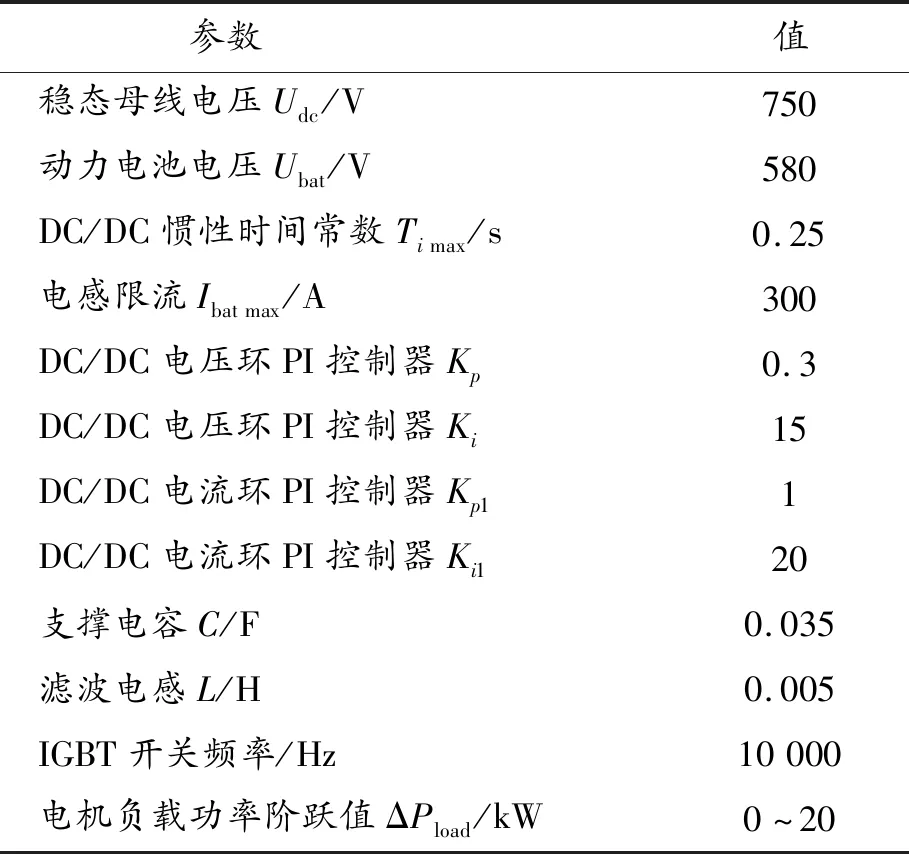
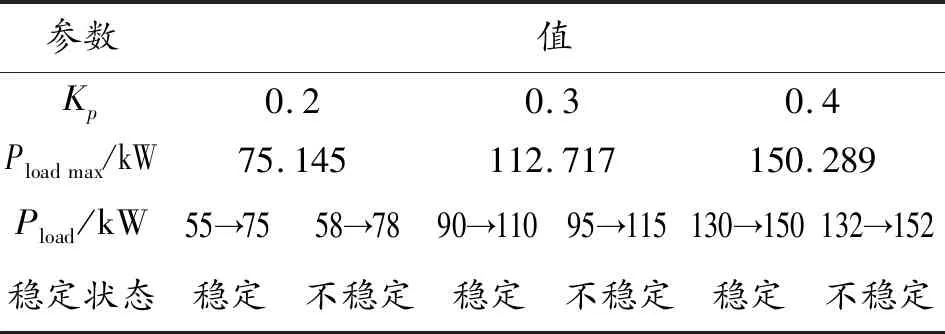
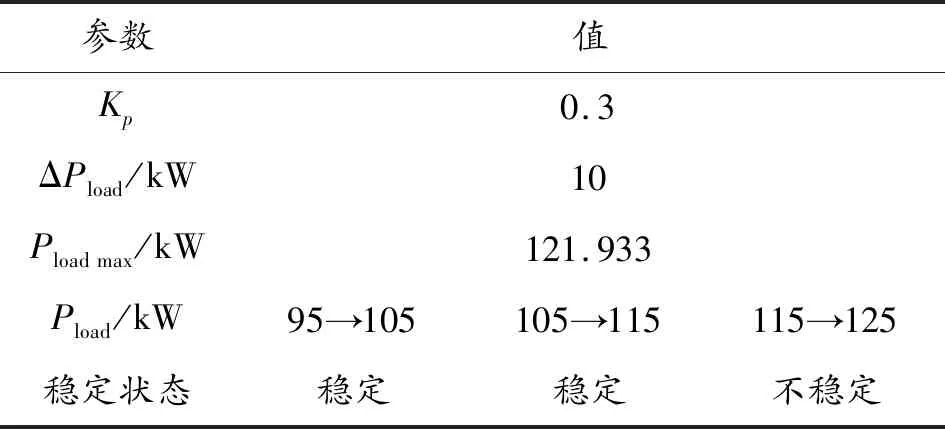
Pload (13) 式中udc为暂态母线电压,要将瞬时母线电压可能的最小值Udcmin考虑在内,因此需要对上式结果进行修正。 假设负载功率瞬间突增,其能量全部由支撑电容补充,则有 (14) 其中Timax为DC/DC变换器响应惯性时间常数。 则可得修正后的系统稳定域为: (15) 以上方法求解系统稳定域只针对系统拓扑结构进行分析,并未考虑源的输出能力有限性,而为了保护电源,实际情况下往往会对变换器电感电流作限流处理,设该系统电感电流最大值为Ibat max。则根据功率守恒易得 Pload (16) 则结合式与式可得最终估计的系统稳定域为 (17) 给出该车载综合电力系统部分电器参数如表1所示。 表1 车载综合电力系统部分电气参数 结合系统电气参数以及式(17),分析有: 为了验证所推导系统稳定域的合理性,开展了硬件在环仿真实验。利用dSPACE生成控制器代码并下载到中央控制器;Vortex搭建车辆动力学模型模拟实车场景;RT-LAB1模拟车载电力系统、RT-LAB2模拟驱动电机系统;各模块之间建立FlexRay网络构成硬件在环仿真环境,结构如图6所示。 图6 硬件在环仿真系统结构框图 首先,验证DC/DC电压环PI控制器比例系数Kp小于0.4时增加Kp值对系统稳定域的影响。令ΔPload为20 kW,根据式(17)计算出理论上电机功率最大值以及电机功率阶跃时系统的稳定状态预测如表2所示。 表2 Kp对系统稳定域的影响预测 图7为Kp取0.2负载功率阶跃时母线电压与负载功率波形,图7(a)中驱动电机功率在0.6 s时从55 kW阶跃至75 kW,母线电压经过衰减震荡后保持稳定;图7(b)中驱动电机功率在0.6 s时从58 kW阶跃至78 kW,母线电压出现较大波动,且虽然在0.9 s左右恢复到750 V但波形具有大量谐波,系统稳定性变差,仿真结果与理论预测的系统稳定状态基本一致。 图7 Kp为0.2,负载功率阶跃时系统仿真波形 图8为Kp取0.3电机功率阶跃时系统仿真结果。图8(a) 中驱动电机功率在0.6 s时从90 kW阶跃至110 kW,母线电压保持稳定;图8(b)中驱动电机功率由95 kW阶跃至115 kW,母线电压出现约±50 V的震荡,负载功率亦无法达到115 kW,系统崩溃。仿真结果与稳定域预测结果一致。 图8 Kp为0.3,负载功率阶跃时系统仿真波形 为验证电机负载功率阶跃值ΔPload对系统稳定性的影响,在Kp为0.3时,根据式(17)计算出理论上电机功率最大值以及电机功率阶跃时系统的稳定状态预测如表3所示。 表3 对系统稳定状态预测 图9为Kp取0.3,ΔPload取10 kW,电机功率阶跃时系统仿真波形。通过对比图9与图8(b)发现,系统参数除ΔPload以外其他一致。图8(b)中电机功率由95 kW直接阶跃至115 kW,母线电压失稳,系统崩溃;而图9中,电机功率在 0.4 s 由95阶跃至105 kW,然后在0.6 s时阶跃至115 kW,母线电压波动后恢复750 V,系统保持稳定,说明减小ΔPload有效提高了系统带载能力;在0.8 s阶跃至125 kW时母线电压失稳,系统崩溃。仿真结果与表3中通过式(17)理论预测得到的结果一致。 图9 Kp取0.3,ΔPload取10 kW电机功率阶跃时仿真波形 图10为Kp取0.4电机总功率阶跃时系统的仿真波形。图10(a)中电机功率在0.6 s由130 kW阶跃至150 kW,母线电压保持稳定;图10(b)中电机功率在0.6 s时由132 kW阶跃至152 kW,系统崩溃。仿真结果再次验证了理论预测结果的正确性。 图10 Kp为0.4,负载功率阶跃时系统仿真波形 从以上仿真结果可以得出,随着Kp的增大,系统可带电机负载功率逐渐增大,当Kp为0.4时,电机功率可达约150 kW,已经逼近源最大输出功率174 kW,考虑开关管以及电机负载热损耗的存在,继续增大Kp对提高系统可带电机负载功率最大值效果将不明显。 为研究车载综合电力系统在大信号扰动下的失稳边界问题,建立了系统的大信号模型,根据混合势函数理论推导了系统的稳定域,考察了两个重要参数对系统稳定域的影响规律,最后通过硬件在环仿真验证。得到结论如下: 电机功率阶跃值也会对系统的稳定域造成影响,ΔPload值越小,系统可带电机负载功率值越大。 DC/DC变换器电压环控制器比例系数Kp小于0.4时,增加Kp值能够有效扩大系统稳定域,提高系统带载能力;超过0.4后,受系统源输出能力制约,提高效果不明显。 通过混合式函数理论得到的车载综合电力系统稳定域能够有效预测评估系统的稳定性能。2.2 系统稳定域估计

3 硬件在环仿真实验





4 结论
猜你喜欢
汽车实用技术(2022年10期)2022-06-09中国科技纵横(2021年22期)2022-01-08汽车维修与保养(2021年11期)2021-03-11科技信息·学术版(2021年7期)2021-01-10宇航学报(2020年9期)2020-10-12汽车维修技师(2019年7期)2020-01-16汽车维修与保养(2019年3期)2019-06-19课程教育研究·学法教法研究(2018年20期)2018-08-11现代兵器(2017年4期)2017-06-02中文信息(2016年7期)2016-05-14
