
改进型空中交通流量预测算法的验证与实现
2021-01-12 13:32曾培彬
计算机测量与控制 2020年12期
陈 恺,曾培彬,蔡 浩
(1.中国民用航空中南地区空中交通管理局 广西分局,南宁 530000;(2.中国民用航空汕头空中交通管理站,广东 汕头 515000;3.汕头大学 工学院,广东 汕头 515000 )
0 引言
流量预测为空中交通管制员(以下简称管制员)提供航路容量、航路降落次序等信息并提供分配建议航路时隙,给出合理的航班流量管控决策,实现航班流量的有序管理和优化空域效能,是当前空中交通管制(以下简称空管)研究的热点。
当前较为常见的方法有利用同一航班有规律的历史轨迹进行四维飞行航迹预测实现预测[1]、运用混合估算对航空器飞行状态和模型进行估计进行预测设计[2]、研究随机线性混合系统预测航空器飞行状态的改变导致的4D航迹剖面改变[3-4]进行预测设计、研究高斯混合模型并对航班相邻时刻位置偏移量建模,利用机器学习算法优化预测模型[5]等。这些研究为航迹预测开拓了新的算法思路,然而空管是动态变化较大、实时性要求较高的工作,要求模型具有良好的鲁棒性和预测的准确性,符合现场运行状态的预测模型通常是需要多次验证的复杂模型,复杂程度比上述文献提出的理论研究更加复杂。与此同时,在实际现场运行中复杂算法可能会对空管流量预测系统的运行带来较大的开销,降低系统稳定性,这对于空管工作而言是不可接受的。利用DTW算法匹配模型[6]和元胞传输预测模型[7]相对上述模型复杂程度要低,在空管流量预测系统具有更为实际的应用价值。
实际上,空管行业规范近年已逐步规范相关监视信息处理,信息源比以往更加丰富多样,这些可以为流量预测提供较好的应用资源,节省流量预测系统开发的时间和成本。基于空管现场实际运行需求,本文设计了一种利用实时的空中交通管制自动化系统(以下简称空管自动化系统)综合航迹数据和飞行计划数据,建立4D航迹剖面模型,并能根据航空器运行态势实时修正预测航迹,实现区域航班流量精确预测的方法。
1 空管数据源及关键技术研究
1.1 系统应用的空管数据源
综合航迹数据是空管自动化系统多种监视源(雷达、ADS-B等)综合处理产生的系统航迹与飞行计划数据融合的航迹信息,包含目标航迹的WGS-84坐标、高度、速度、航向角和24位地址码等,通过解析目标的综合航迹数据,流量系统可实时获取航空器的运动态势。
与此同时,空管自动化系统设计规范指出[8],空管自动化系统应可通过网络或串口形式的方式输出给予其他系统。这为本设计提供了较好的基础,直接采用空管自动化系统综合航迹进行开发,航迹更新周期在合理范围可进行调节,航迹更新速度快,完全满足流量系统开发所要求的高时效性和稳定性,同时也提高了开发效率。
MH4029.3是民用航空空中交通管制自动化系统第3部分:飞行数据交换规范[9]。其指出基础飞行数据交换报文(以下简称:IFPL),用于空管自动化系统及相关系统间基础飞行数据交换,其主要包含航班号、起降机场、航班起降时间、航路等信息。流量系统可通过IFPL报获取航迹的计划信息,建立计划航迹剖面模型,当计划信息变更时,重新修正计划航迹剖面,使计划航迹具备良好的计划迭代性。
1.2 改进型4D航迹预测算法
在航空器实际飞行过程中,特别是在雷雨绕飞情况下,航空器会偏离航路飞行,因此,要对偏航航空器的4D预测航迹进行修正,此处提出计划航迹和雷达航迹偏离的自动相关算法:


图1 航迹飞行图

此外,计划航迹和雷达航迹相关一般考虑以下匹配因子:航迹T到达最近一个航路点的时间τi,航向角αi,偏离角βi,与航段的距离λi。




设航路宽度为20 km,当d<10 km时,认为该航空器是沿着当前航段飞行,经过某一航路点后,以当前航路点过点时间为基准,利用等角航迹预测算法[14]进行后续航路过点时间的推算,更新4D剖面航路。当d>=10 km时,表示该航空仍在航段范围内,但属于偏航飞行,则需将航迹T当前航向角与后续航段的航向角进行比较,以最小角度差值作为航迹T的最终预测位置点,并以航迹T当前时间、速度和高度等信息来推算到达目的位置的时间,更新后续航路的过点时间,从而更新4D剖面模型。
1.3 改进型流量统计算法
实时飞行流量计算是流量管理系统一个重要组成部分。计算管制空域内的流量关键在于判断航空器所处的空域。因此,可以将空域投影在平面进行分析,进而转化成平面的点空域、线空域、面空域。
1.3.1 改进型点空域统计
点空域流量主要包含航路的固定点、导航点、边界点的流量,传统的判断方法是以该导航点坐标为圆心、某一经验值参数为半径的圆设定过点判断范围,当航空器的平面投影进入判断范围,则判定该航空器为某航路导航点的流量目标,如图2所示。这种方式能够简单处理正常飞行的航空器过点判断,然而,航空器在实际飞行过程中,在航路导航点附近可能存在偏航情况(特别是雷雨季节或军航活动较频繁的区域),利用这种方式的计算容易出现误判,计算过点时间也有较大的误差。因此,此处引入一种改进型点空域飞行流量统计模型,如图3所示。A、B、C分别为航路上3个航路固定点,线段BD为航路点B的角平分线,即∠α=∠β。航空器与角平分线相交于角P,角度为φ,∠α,∠β,∠φ均是相对于正北方向的角度值。已知A、B、C的WGS-84系坐标经纬度,通过高斯投影[15]算法将其转换成平面直角坐标系,得到A、B、C点坐标分别为PA(XA,YA),PB(XB,YB),PC(XC,YC)。
利用余弦定理推算出:

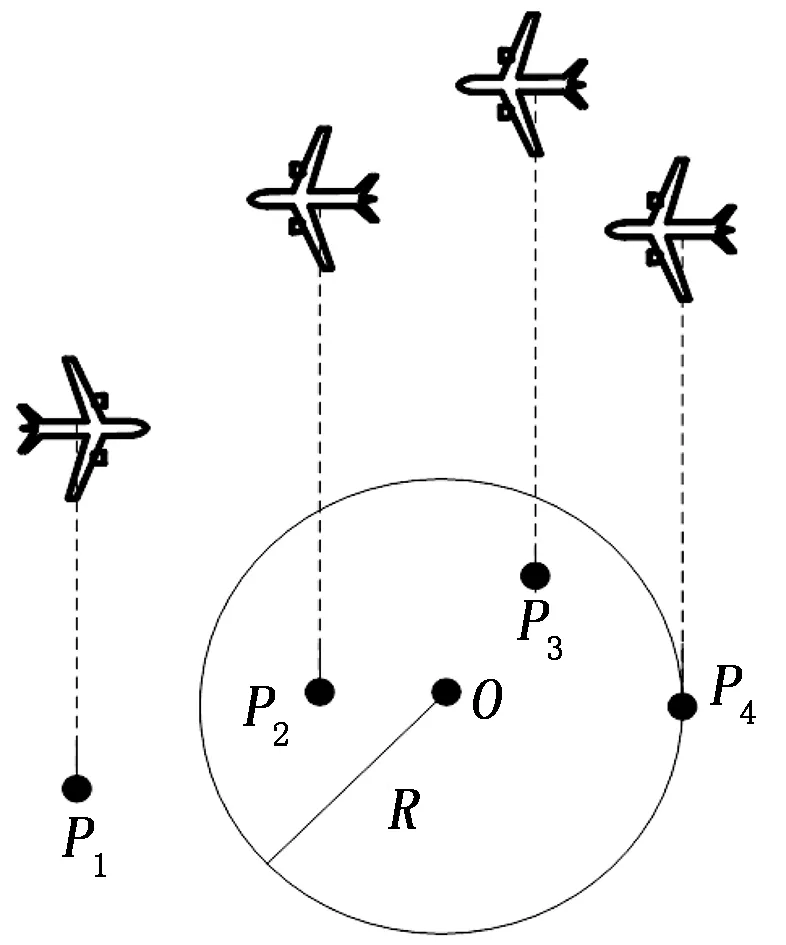
图2 常规点空域实时飞行流量计算模型
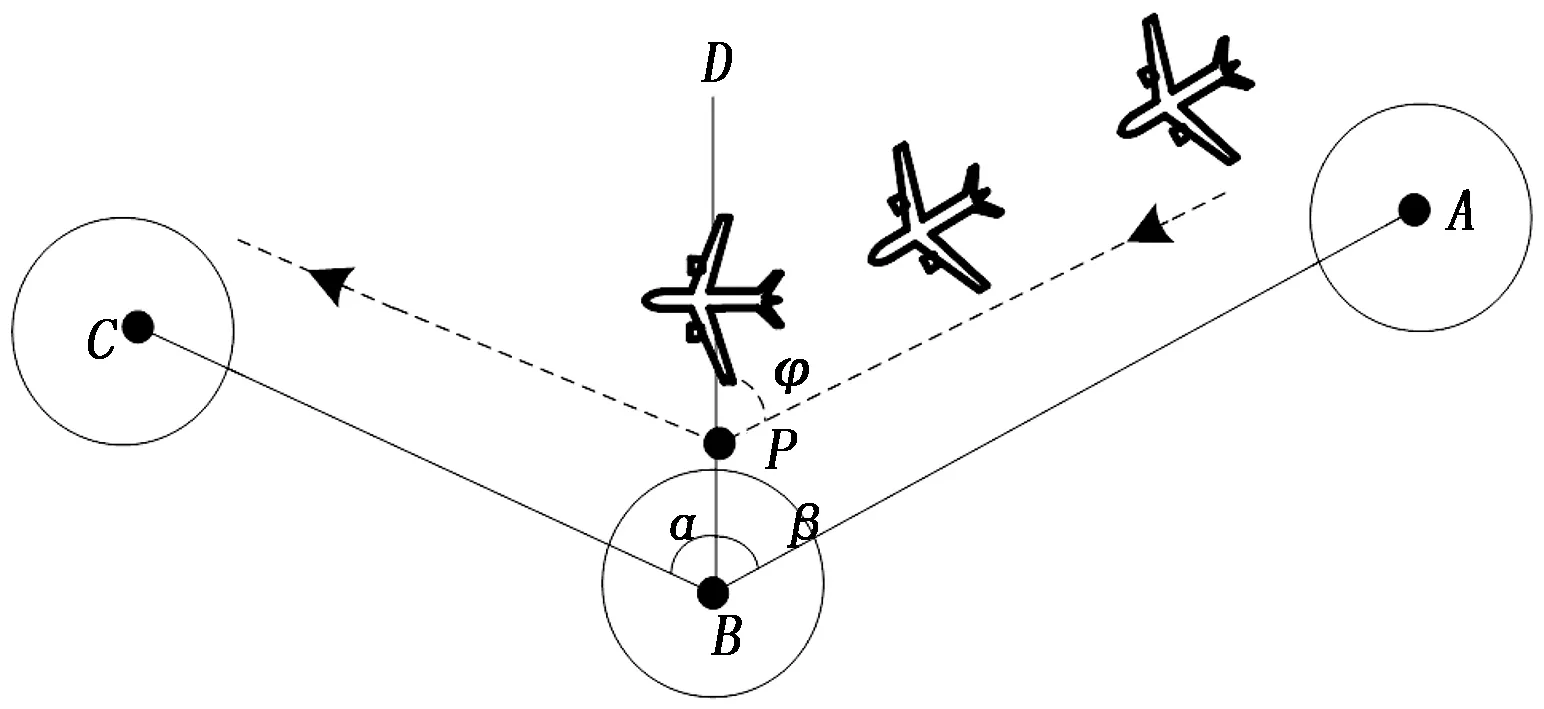
图3 改进型点空域实时飞行流量计算模型
1.3.2 改进型线空域统计算法
航空器A、B、C、D分别位于不同高度层,其平面投影依次为a、b、c、d,e和f是航路上的导航点,r是航路宽度。传统的航路流量计算方法主要通过获取航空器的平面投影位置进行流量计算。如图4所示,a、b、c在航路范围内,d不在航路范围内,说明此时航路流量为3架次。但此方法无法满足常见的航空器偏离航路后再回到航路飞行的情况。因此,此处提出一种利用航向角来判断航空器运动趋势,实现航路流量实时计算的方法。
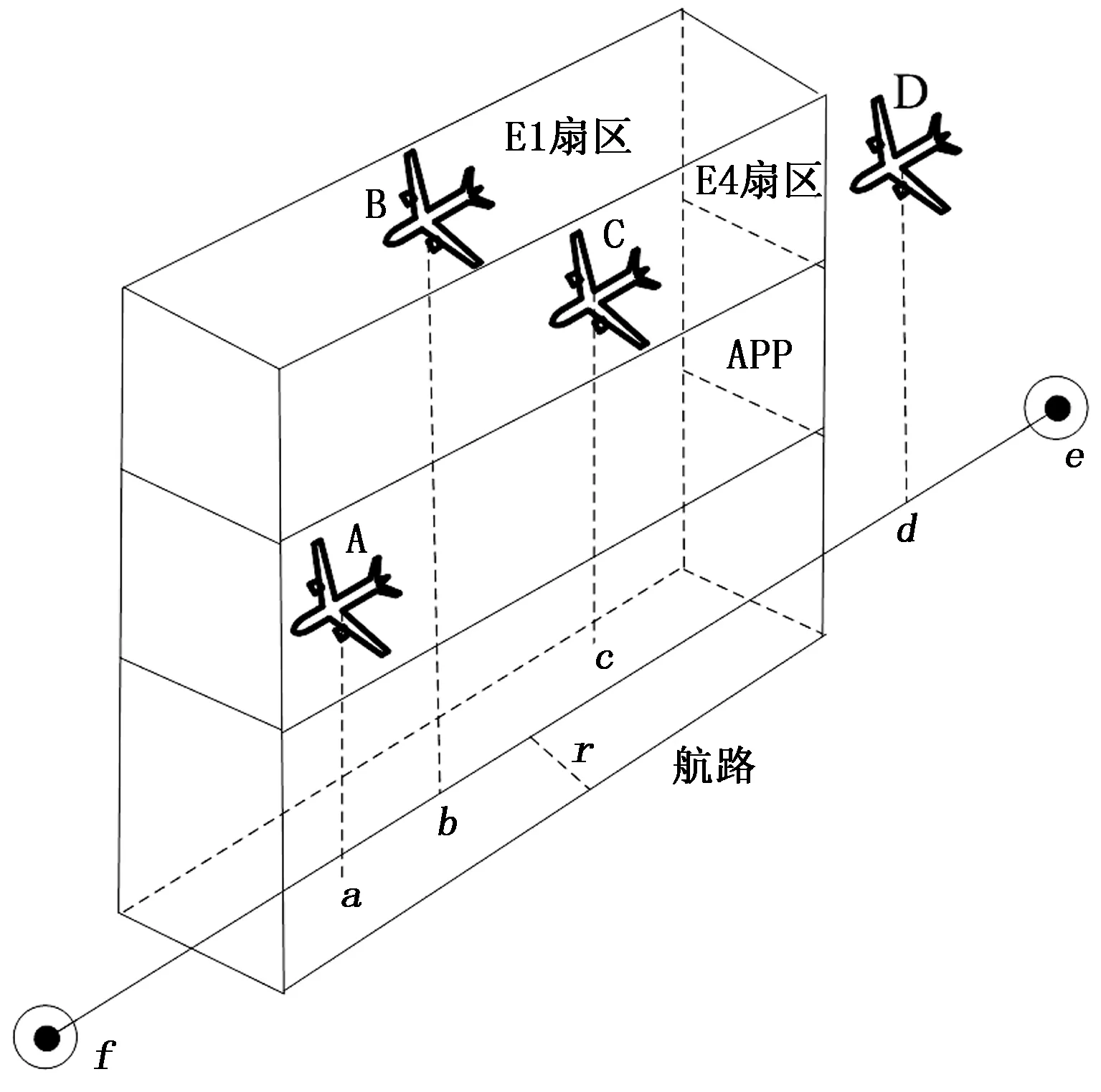
图4 常规线空域实时飞行流量计算模型

图5 改进型线空域实时飞行流量计算模型
假设四边形A1A2B2B1是AB段航路,A和B是导航点,航路宽度为20 km,B1和B2是B的对称点,长度为10 km。∠BAC是航空器沿航路由A飞行至B相对正北方向的航向角,∠B1AC和∠B2AC是航空器在航路宽度范围内,左右偏离航路到达B点相对正北方向的最大航向角,如图5所示。因此,判断航空器平面投影是否在有效航路范围内,可以通过雷达数据实时获取航空器航向角。若采集的航向角∠β满足∠B1AC≤∠β≤∠B2AC,则可判断航空器沿航路飞行,并将其归纳为该航路的实时流量队列。算法步骤如下:
由上述可知,A和B点的平面坐标可通过高斯投影计算,则:
(1)
∠BAC=∠1
(2)
(3)
(4)
∠B1AB2为等腰三角形,因此,∠B2AC=∠BAC+∠4;∠B1AC=∠BAC-∠4;本设计通过引接空管自动化系统的综合航迹和MH4029.3飞行计划信息,便可使用简单的算法实现航路实时流量计算。假设多架航空器由导航点e进入航路,先通过综合航迹直接获取航空器的当前航向角矢量,所获取的航向角与系统离线自定义的OBA表(存放所有航路导航点之间的最大和最小航向偏移角)进行比较,并以此判断航空器的运动趋势;另一方面,系统可以通过空管自动化系统的IFPL报文中的扇区字段sector获取航空器当前管制扇区。实际运行中,系统将对满足述条件的航空器出现频度进行统计,当出现次数大于系统设置参数时,目标航空器的呼号、扇区等信息将存入系统设置的航路流量HashMap[16]表,进入航路的实时流量统计队列。当已进入队列的航空器航向角或扇区管制权限发生变更时,系统不再对该航空器进行航路流量统计,算法流程如图6所示。
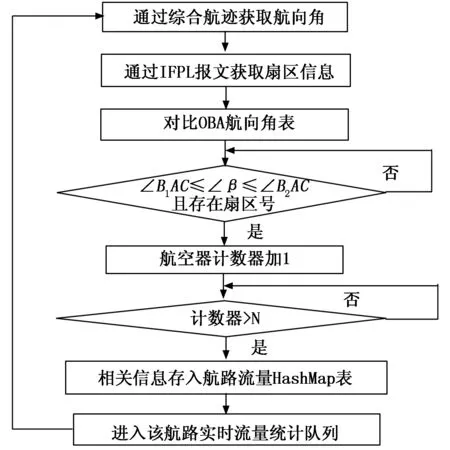
图6 航路飞行流量计算流程图
面空域流量计算可以等效为具备管制扇区的航空器就直接列入该空域的流量统计队列,系统则可以直接利用IFPL报中的sector字段对航空器进行扇区归类统计。
2 算法的验证与实现
文献[6]提出通过分析雷达数据及交通流特性,将扇区交通流按一定原则划分成5种标准模式,然后利用DTW算法对选取测试序列进行模式匹配,最后统计该模式下扇区最大流量,求出扇区的运行容量。对于某管制扇区短时间内航班预测流量过大时,管制员会根据空域情况实时调整航空器的航路或高度。在这种情况下,均会触发自动化系统重新对该航空器4D剖面计算模型修正,根据4D轨迹和管制区、扇区的物理关系,更新管制区内扇区之间交接点和每个航路报告点的所属扇区。因此,随着航空器改航频率越高,交通流模式聚类匹配相似度越低,在一定程度上影响了扇区容量计算的精度。
采用2020年1月20 日南宁(ZGNN)区域雷达记录数据及飞行计划数据,数据包含同一时间段各管制扇区的流量信息,研究本文流量统计算法与DTW统计算法在特定空域条件下扇区流量变化情况,得到扇区与航空器飞行高度关系实测流量散点如图7所示。
其中,E1,E2,E3为南宁空域低扇,E4,E5,E6分别对应E1,E2,E3的高扇。由图7可知,本文所研究的统计算法得到E1扇区接管航班的密度大于E4扇区,是由于相邻广州管制区限制飞行高度,导致以往由E4扇移交给广州的航班大部分转移至E1扇区接管,并按指定高度对外移交;由于DTW统计算法仍根据历史序列进行模式匹配,得到E4扇区接管航班的流量密度较大,与实际运行情况有所差异。对于其它扇区,由于没有出现外管制区限高飞行或雷雨绕飞等情况,利用本算法和DTW统计算法得到的航空器流量密度值基本保持一致性。

图7 特定空域下两种统计算法流量对比图
采用某天南宁终端区空域航班较为正常的实际数据进行流量预测实验,如图8所示。基于元胞传输的预测模型[7]也能较好描述了正常时间段内航班流量预测波动趋势,预测结果稍比本算法粗略,误差波动大于基于偏航修正的4D航迹预测模型。而在具体工程实践上,该算法的元胞划分需要根据空域具体情况进行,机场的终端区特别是低纬度机场终端区的夏季天气变化较大(如南宁机场),不可预测情况较多,航空器需要采用多种管制策略,对于元胞传输预测而言算法实现困难。如若需要进行工程设计,该算法需要机器学习,针对不同环境进行参数的快速自我设置,算法实现复杂度较高。

图8 两种预测方法与实际流量对比图
在实现方法上利用C/S架构,设计了一种基于JAVA的改进型流量预测系统(如图9所示),具备了动态态势界面、4D航迹剖面建立、流量预测与统计、流量告警和算法预测对比等功能。图10是某一天南宁空域在雷雨天气下E1管制扇区实时流量预测图,为方便分析,此处统计04∶00至18∶00共16个时刻的流量预测和实际接管架次。与此同时,系统绘制了基于传统的工程实现方式(飞行计划FPL对流量进行预测)、雷达航迹修正预测、4D航迹预测以及系统预测的折线图。从图中可知,统计的16个时刻中,飞行计划FPL进行预测只有2个时刻点与实际接管架次数一致,这也说明空管工作具有较强的实时动态性,提前120小时内的飞行计划[10]并无法完全实现流量预测的精准。

图9 南宁流量预测系统
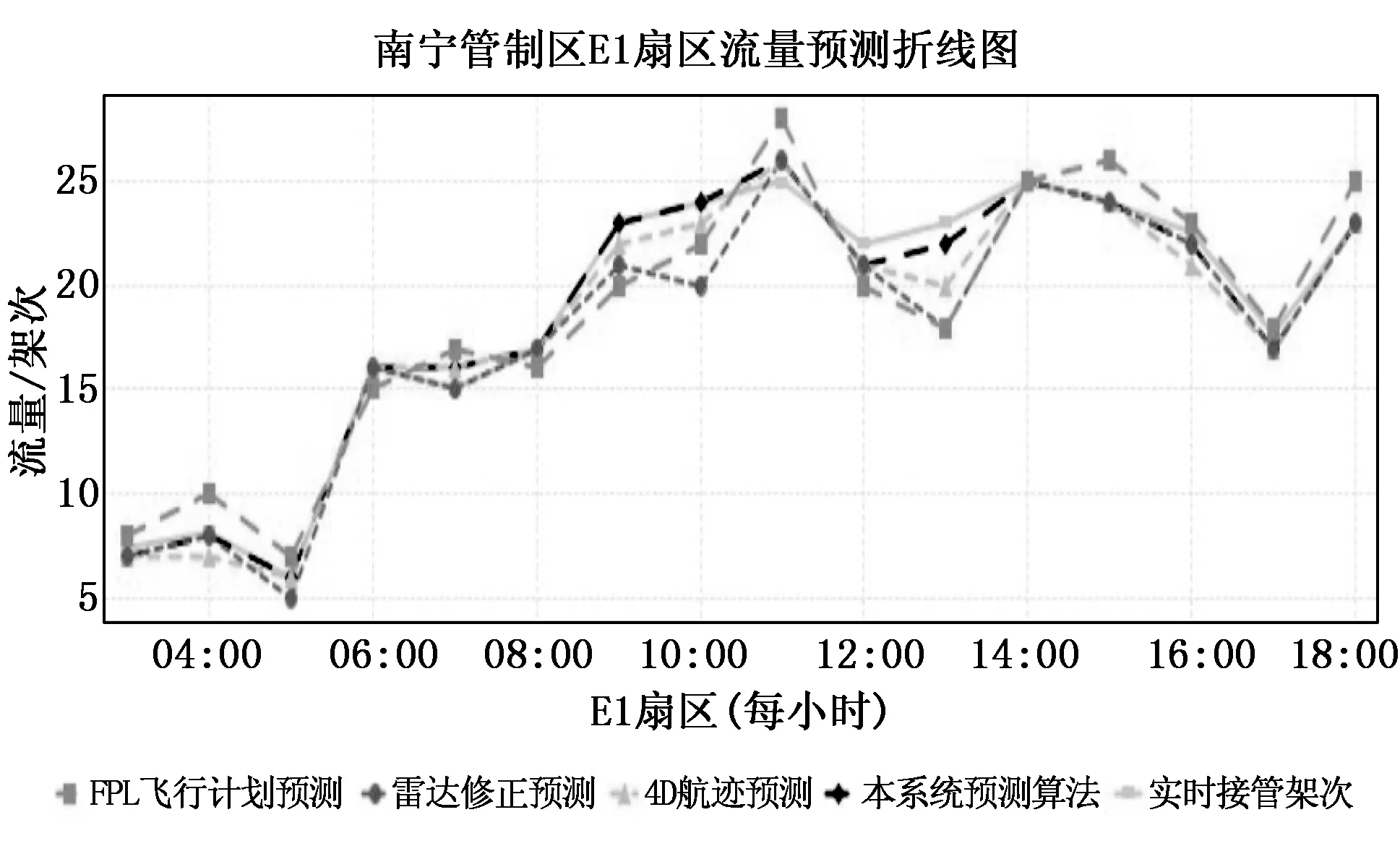
图10 不同预测算法对同一扇区实时流量预测图
在凌晨05∶00,接管架次是统计所有时刻中架次最少的时刻,4D航迹预测和系统预测能较好匹配实际接管架次,其他预测方法也较为接近实际接管架次,这是因为扇区区域内航空器架次少,空管的可控余量较大,管制员对区域内的航空器的人为干预会更少,飞行复杂度降低,FPL计划预测、雷达修正和4D航迹预测算法能够简单满足预测。此种情况下,系统改进的预测算法将更加贴近实际,预测结果架次与实际接管架次一致。在13∶00时刻,南宁空管现场该扇区空域出现午后大面积雷雨,不少航空器需要进行绕飞,从图中可以看出,所有预测算法预测的架次都与实际接管的架次有一定的差异,但系统改进算法在实现中表现出最优的效果,误差率仅为4.3%,其他方法预测误差率皆大于10%。随着统计航班量的增加,系统预测算法预测的误差将会进一步的下降。
从总体走势可以看出,系统设计的预测算法绘制的折线总体较其他算法预测折线更加贴近实际接管架次折线,采用本文的改进型4D航迹预测(偏航修正)比常规4D航迹预测方法更能真实接近实际扇区接管航班的架次数量。通过系统实际运行所采集的数据表明,在复杂天气情况下,基于偏航修正的4D航迹预测,更能有效、准确地预测航路、扇区交通流量。
由图11可知,航迹平面投影法和运用航向角投影法所统计的航班流量与实际航路交通流量基本一致,但运用航向角投影法只需通过获取航迹综合航迹的航向角,与离线系统离线定义OBA表比较,算法具备实时性和高效性,能减少系统开销。
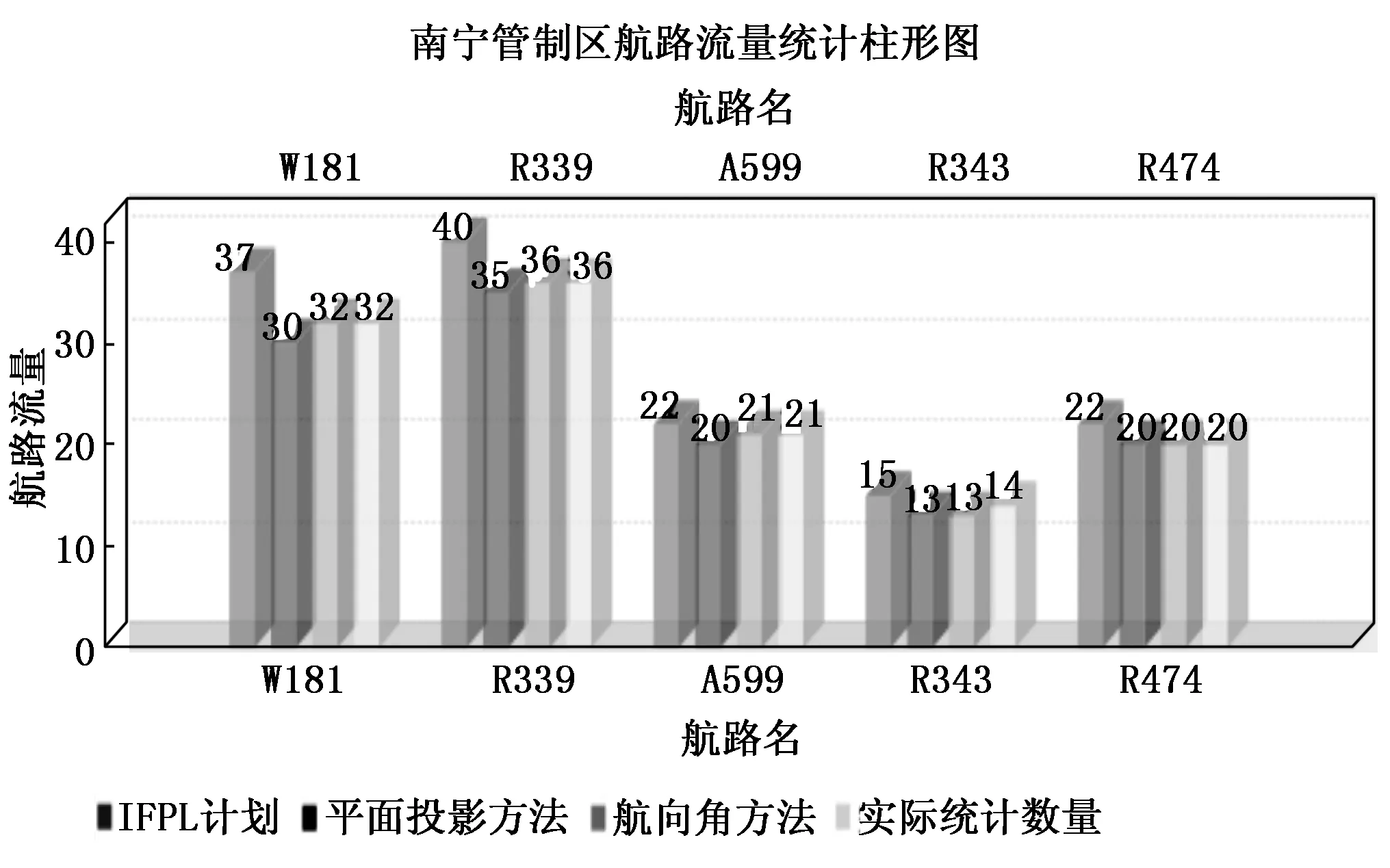
图11 管制区域重要航路流量统计图
3 结束语
目前,系统已经在民航广西空管分局空中交通管制现场投入使用,用户体验较好。可以得出以下结论:
1)该融合空管自动化系统综合航迹和IFPL计划信息的4D航迹剖面预测模型,结合基于偏航修正的4D航迹预测算法和改进型流量统计算法,能有效改善航迹预测和统计的误差,实现高精度的4D航迹预测和流量统计。
2)空中交通流量预测是一个数据变化实时性较强的处理过程,需要针对现场实际运行进行大数据挖掘以提高相关算法和系统的运行的准确度。后续研究将利用二进制气象网格数据(GRIB)和其它航路气象信息融合做进一步的数据挖掘,并综合考虑管制意图等因素,建立更为完善的4D航迹模型,进一步提高航迹预测精度。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
计算机技术与发展(2022年7期)2022-08-02
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
南北桥(2022年2期)2022-05-31
火力与指挥控制(2022年2期)2022-03-23
雷达科学与技术(2020年4期)2020-09-11
计算机技术与发展(2020年2期)2020-04-15
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
