舰船横向航行补给的激光测距技术研究
2021-01-13 07:15孙灵远朱志军王益民郭亦平任元洲
声学与电子工程 2020年4期
孙灵远 朱志军 王益民 郭亦平 任元洲
(天津航海仪器研究所九江分部,九江,332007)
在舰船横向航行补给任务下,能够稳定、连续、自动测量补给舰与接收舰之间的距离和相互之间的速率,可以为该任务下船舶操纵提供依据,提高船舶航行的安全性和补给效率。目前,国内外在确定补给间距时,主要依据海上试验法确定补给间距的范围。在实际补给作业时,由相关人员根据补给经验确定当前海区态势下的补给间距。在理论研究方面,国内关于舰船横向补给间距决策方法研究的文献较少,且以研究横向补给时的最大及最小安全间距居多。文献[1]系统地研究了补给间距对于货物安全的影响,给出确定最大安全间距的方法;文献[2]给出横向补给最小安全间距的确定方法,但该方法仅考虑静水条件下的海上补给,忽略风、浪、流的影响,其计算结果比实际可采用间距小。
为了验证横向补给过程中新型测距方法替代距离索的可行性,美国海军在十多年前分别在不同的海况、气候环境、时间(昼夜)做了数次试验。美国Marine Proximity公司的测距系统通过美国海军司令部认证并被列入北约ATP-16补给条例[3]。该系统目前在美国海军舰船上广泛用于横向补给过程中两舰距离的测量,如图1所示。此外,据相关资料,澳大利亚海军也在十多年前开展过类似的研究工作。

图1 美国海军补给测距系统应用
本文研究的横向航行补给距离测量系统利用能够同时获取距离信息和目标图像信息的稳定云台,通过测距传感器和图像信息融合技术,完成舰舰距离的自动稳定测量。
1 横向航行补给测距分析
在横向航行补给时,距离测量设备一般安装在接收舰上。横向并排航行的舰船在海浪中运动时,两者位置关系受海浪的影响。补给过程中,要求补给舰和接收舰以相同的航向以及相同的航速航行,如图2所示,该工况下仅需要一个测量点便可满足距离测量要求,两舰间距为S。

图2 航行补给理想工况下测距示意图
图2是理想的航行补给工况,在实际横向航行补给时,两舰会出现不同程度的纵距和横距偏差,从而引起航向偏差,如图3所示。
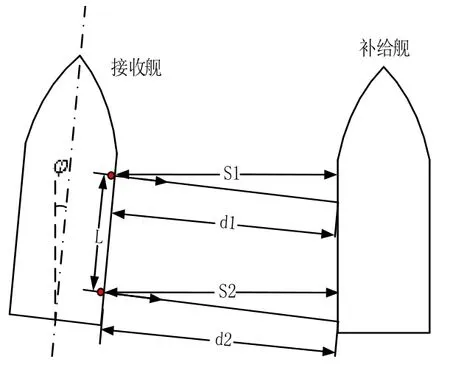
图3 航行补给偏航工况下测距示意图
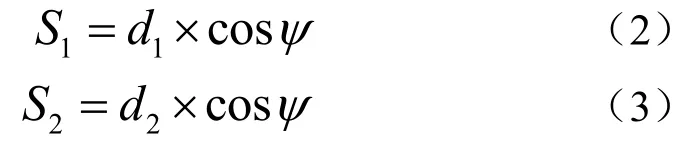
该工况下需要两个测量点的数据才能体现出接收舰与补给舰的距离,并根据两个测量点的数据计算出两舰的航向差ψ:

式中,d1、d2是两个传感器以接收舰为基准所测得的垂直距离,L为两测量点之间的距离。但由于航行补给过程中,一般以补给舰作为目标舰,因此图3中垂直于补给舰的S1与S2为两舰在两测量点的间距。式(2)、(3)为两舰在两测量点的间距与航向差ψ的关系。
2 距离测量方法选择
在近距离测量时,雷达、GPS等的测量精度满足不了要求,因此需要配置较高精度的近距离测距传感器,以满足航行补给等近距离作业的要求[4]。测距传感器的测量精度、测量距离、抗干扰性等直接决定了距离测量装置的好坏,因此采用的测距传感器必须能够满足在航行补给和靠离码头的气候环境中有可靠的测定距离。目前常用测距方法主要有超声波测距、红外测距、毫米波雷达测距和激光测距,方法特点对比如表1所示。
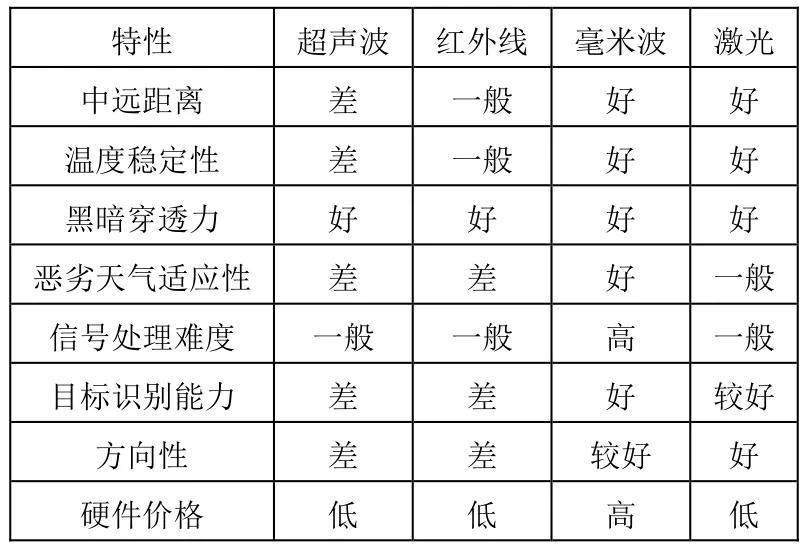
表1 测距方式的特点比较
通过表1可知,激光测距与其它测距方法相比,具有测量精度高、测程远、抗干扰性强、大气传输性能好、隐蔽性好、对雨雾有一定的穿透性等优点[5]。激光测距研究经过多年的发展,技术上已经有了很大的进步,随着半导体激光技术的发展,激光测距传感器在军民领域中均有广泛的应用。另外激光测距传感器的光束强度是满足用眼安全标准的,而且瞄准的是船体,不会对人员造成伤害。
3 横向航行补给自动测距研究
横向航行补给时,补给舰从待机站位到补给站位过程时间相对都较短,且测量距离和角度均不断变化,因此需要人工手动操作测量。两舰横向航行补给作业一般时间较长,且两舰的相对位置几乎不变,因此该过程可实现持续、自动跟踪测距。
3.1 影响测量效果的因素分析
持续自动测距过程中,接收舰及补给舰的横摇、横荡、纵摇、升沉等运动均可能对测距过程带来一定影响[6]。接收舰的升沉和纵摇将造成传感器绝对位置的升高或者降低,如图4所示。补给舰的横摇、纵摇、升沉运动将改变激光在被测船上的反射点,如图5所示。
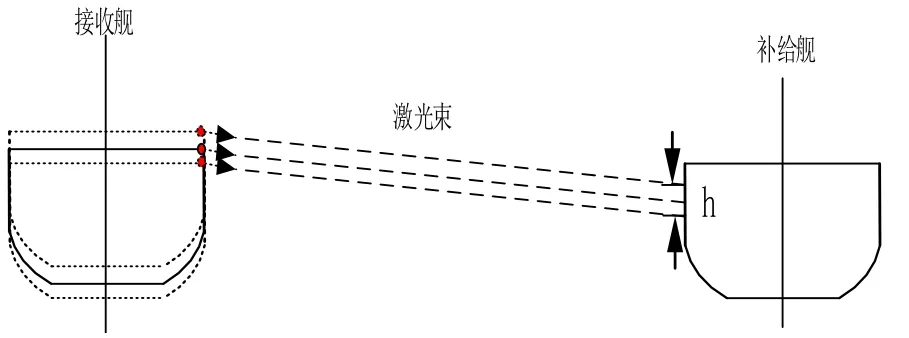
图4 接收舰升沉运动工况下测距示意图
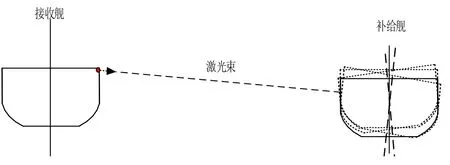
图5 补给舰横摇、纵摇、升沉运动下测距示意图
两舰横向航行补给时,两舰的距离d一般保持在50 m左右。图6所示为两舰相对最大横荡幅值为4 m工况下测距示意图,假设传感器俯仰角∂为3°,则
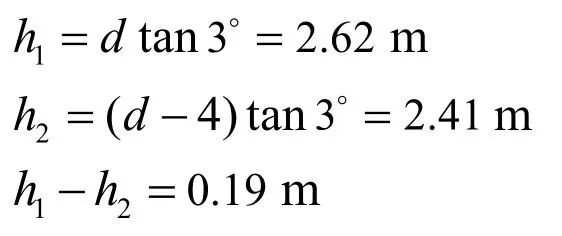
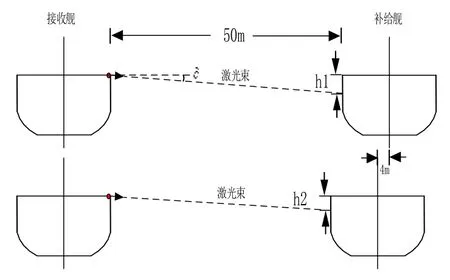
图6 舰船相对横荡工况下测距示意图
补给过程中,接收舰和补给舰的纵摇、升沉、横荡,以及补给舰的横摇引起激光束在被测船舶上的反射点位置幅度变化很小,因此上述情况造成传感器测量目标丢失的概率极小。为了避免由此造成的目标丢失,应将激光束在被测船舶上的反射点定位在被测船舶的船舷与吃水线的中位线附近,如图7所示。

图7 激光束反射区定位示意图
接收舰的横摇是造成测量目标丢失的主要原因。图8为接收舰在横摇幅度为5°时的工况。激光束在舰船横摇上下最大幅值时到达被测船舶的高度差为

因此,在一个横摇周期内,测量目标丢失概率较大。
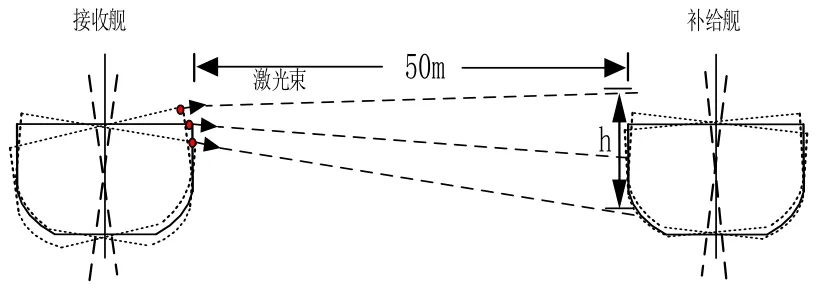
图8 横摇运动工况下测距示意图
为避免因接收舰横摇造成的目标丢失,将激光测距传感器激光束始终保持与水平面相同的角度而不受舰船横摇影响,可以达到持续自动测距的目的。将激光测距传感器安装于具有舰船横摇稳定功能的云台上。该云台始终保持人为设定的水平角度,有效隔离舰船横摇,确保激光测距传感器水平角度保持不变。稳定测距示意图如图9所示。此时,激光束在舰船横摇最大幅值为 5°能有效降低测量目标丢失概率。
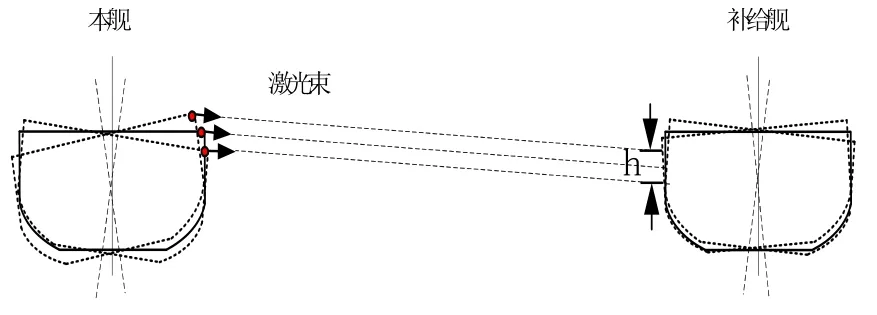
图9 稳定测距示意图
实际测量过程中,云台的俯仰角∂和方位角β影响着舰舰之间距离。补给工况示意图如图10所示。

图10 两舰补给工况示意图
两舰之间的距离为

3.2 海补测距精度
两舰间距测量精度主要影响因素有:传感器的测量精度,云台方位角、俯仰角精度。根据式(4)计算两舰距离,d为传感器实测距离,假设d=50 m。计算测距误差:

式中,传感器测量精度δd=0.04 m;方位角、俯仰角精度δβ=δ∂=±0.1°。则

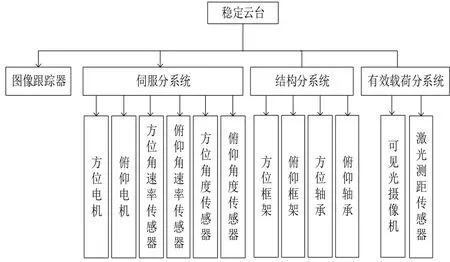
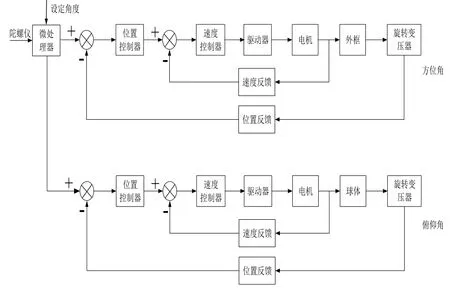
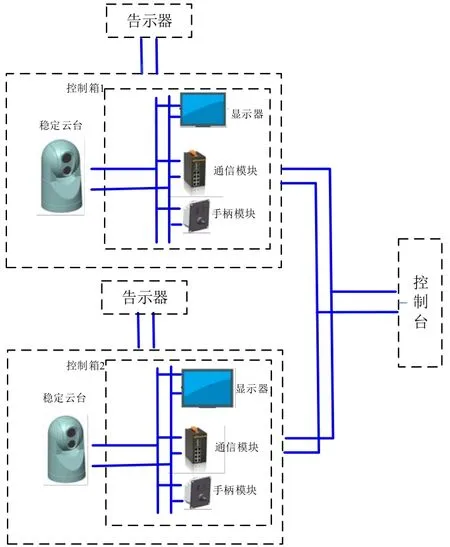
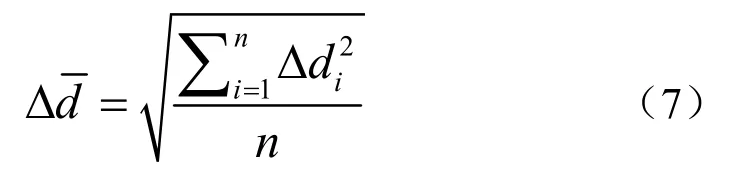
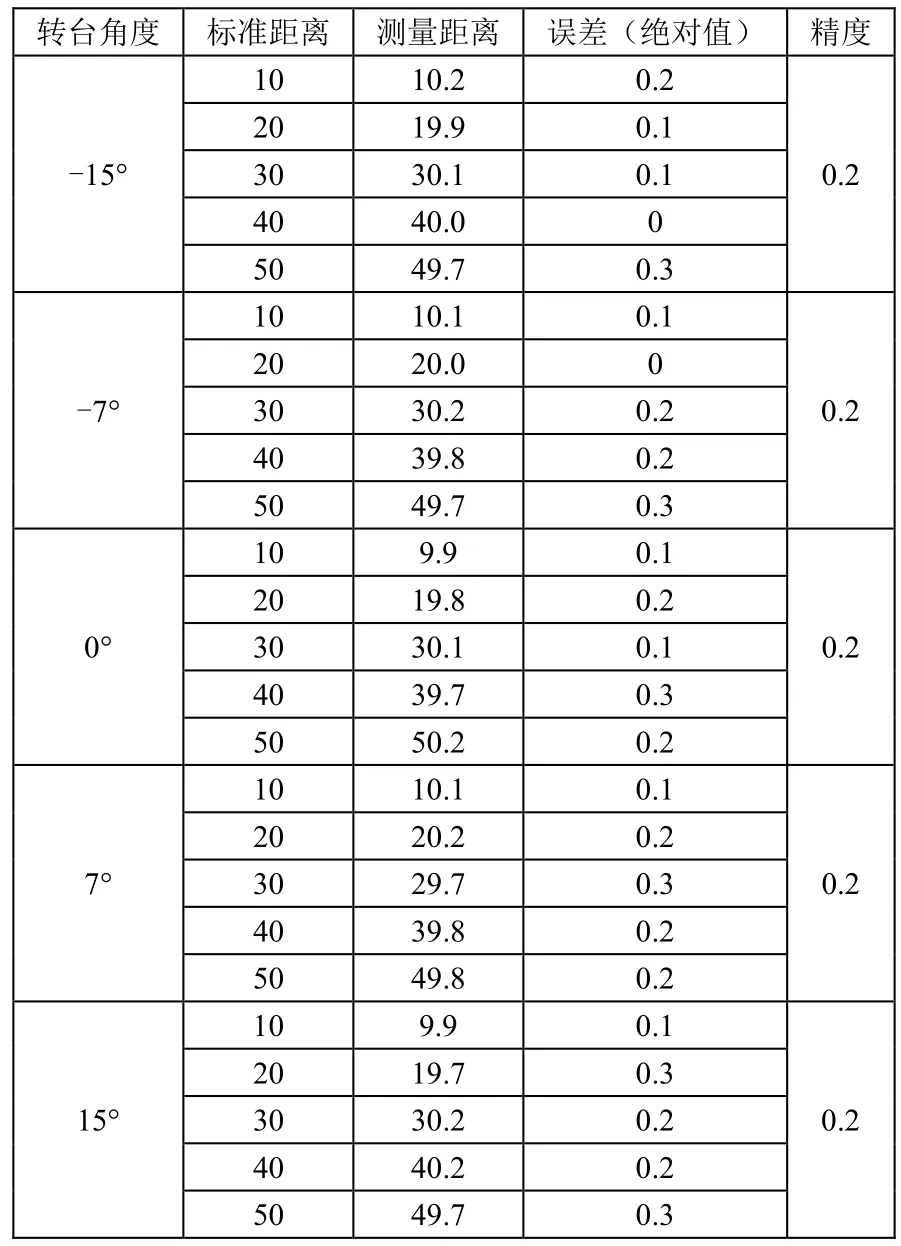
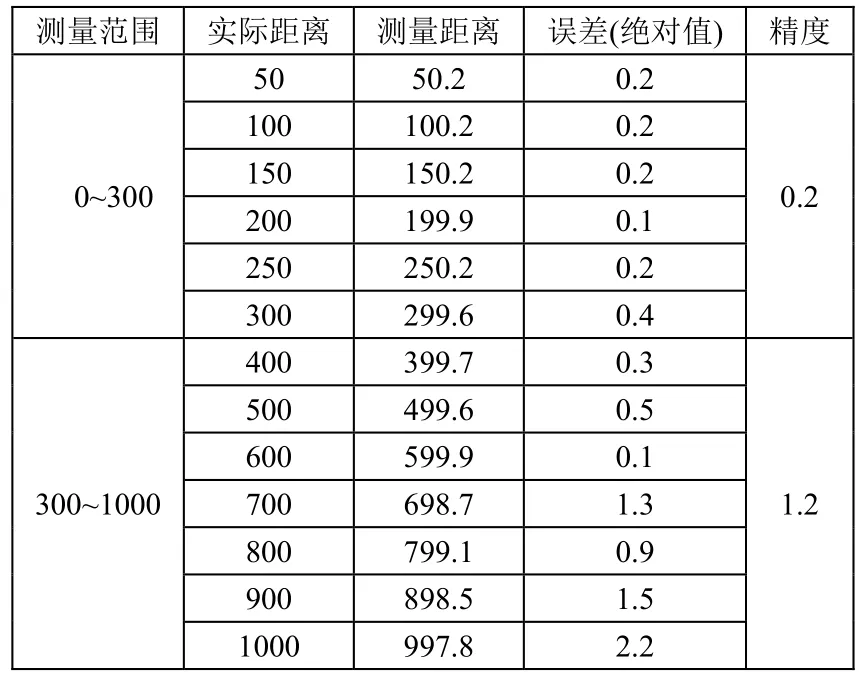
通过式(6)计算得到:当 0 稳定云台有两自由度旋转轴,分别实现负载方位旋转和俯仰旋转。在手动模式下,可通过手柄控制方位轴和俯仰轴的旋转。在自动模式下,由计算机根据陀螺仪及旋转变压器的反馈角度解算出方位轴和俯仰轴的指令转角,驱动电机旋转,实现陀螺稳定的功能。在跟踪模式下,云台捕捉到目标图像,提取目标图像的特征点。利用图像处理算法和云台运动控制算法实现对目标的跟踪。稳定云台主要由图像跟踪器,伺服系统,结构分系统,传感器等组成,如图11所示。 图11 稳定云台组成 图像跟踪器主要实现对目标的跟踪功能。首先,图像跟踪器接收可见光视频。根据控制命令对目标进行跟踪;然后,图像跟踪器实时输出目标偏离系统视轴的方位和俯仰误差信号到伺服控制系统;最后将视频图像输出给测控系统和记录仪等设备,用于显示和记录。 在跟踪模式下,图像跟踪器对目标进行特征点提取,计算出当前帧中的目标在传感器靶面上的坐标值,伺服系统根据该坐标值、当前的焦距值与传感器的像元尺寸,计算出云台应到达的方位角与俯仰角,并驱动光平台转动到该方位角与俯仰角,使目标始终保持在可见光摄像机的靶面中心,伺服系统与图像跟踪器形成闭环,实现目标的精确跟踪。 云台陀螺稳定原理图如图 12所示。微处理器根据操作人员的设定角度和陀螺仪角度实时解算方位轴和俯仰轴的指令转角,指令转角通过比较、放大等环节驱动电机旋转。电机控制部分采用位置、速度和电流三闭环的伺服控制方式。位置和速度控制器采用不完全微分增量式 PID(Proportion-Integration-Differentiation)的控制,有效的提高控制系统的伺服精度[7]。驱动器采用 SPWM(Sinusoidal-Pusle-Width- Modulation)的驱动方法,电机驱动电流与SPWM驱动控制器构成电流闭环,以减小时间常数,改善电机的动态品质[8]。 图12 云台陀螺稳定原理图 激光测距系统采用网络化分布式控制体系结构,通过以太网完成内部各种信息的交互[9-11]。激光测距系统主要由稳定云台、告示器、手柄模块等相关设备组成,如图 13所示。稳定云台和控制箱通过双冗余以太网进行通讯,实时获取目标点一定范围内的影像信息和距离信息。稳定云台具有两自由度旋转轴,分别实现负载方位和俯仰旋转,可以持续激光测距,具有手动、稳定、图像跟踪等工作模式。告示器实时显示控制箱发送过来的距离信息,用于目标舰实时观察相互之间的距离。控制箱主要用于本地稳定云台的控制和目标影像的显示。操作人员可以通过手柄模块选择测量方式,实现手动或自动测量距离。当接收舰由待机站位驶向补给站位时,采用手动测量方式。通过手柄模块摇杆控制稳定云台的旋转和俯仰,获取目标舰一定范围内的影像信息,操作人员根据实际情况通过影像信息选择目标测量点。在稳定工况下,操作人员确定目标点后,确定测量方式,稳定云台陀螺感知船只的晃动方向和角速度,按照一定的算法对信号进行补偿和运算后,使云台保持对船角度不变,实现对目标点距离的稳定测量。在跟踪工况下,稳定云台通过获取目标影像信息,通过图像处理算法和云台的旋转俯仰运动实时跟踪目标点,实现目标点距离的实时跟踪测量。 图13 激光测距系统架构图 为了验证该系统在高海况下的测量精度,分别进行了试验室模拟5级海况下的试验和3级海况下的海上实测试验。精度的计算方法为 通过单轴转台模拟5级海况,检验该系统稳定工况下的测量精度。将单轴转台角度分别设置为-15°、-7°、0°、7°、15°(俯为-,仰为+),测得的实验数据如表2所示。分析表2可知,在高海况下,50 m测量范围,该系统的测量精度在0.2 m左右。 表2 试验室50 m测量范围测量数据 m 在3级海况下,对激光测距系统的测量效果进行实船验证。表3为实船测得数据。在稳定工况下,该系统不仅能够实时自动完成目标舰距离的测量,还可以获取横向补给任务状态下两舰之间的水平速度。 表3 海上实船试验数据 m 分析表3数据可知,在3级海况下,0~300 m范围内,测量精度为0.2 m;300~1000 m范围内测量精度为1.2 m。表2和表3数据表明,该激光测距系统满足船舶横向航行补给的任务需求。 本文通过对横向航行补给过程中舰船的运动状态进行分析,提出的基于舰船横向航行补给的激光测距技术可以有效的隔离船舶纵摇和横摇对两船距离测量的影响,能够稳定、连续的实现距离的测量。实船验证了该技术的可行性和可靠性。基于舰船横向航行补给的激光测距技术可以推广应用到舰船狭水道航行、靠离泊等工程。本文下一步将结合舰船操纵实现舰船横向航行补给任务下自动操控,保证横向航行补给任务的可靠性和安全性。3.3 稳定云台工作原理
4 激光测距系统自动稳定测距实现
5 试验结果
5.1 地面试验
5.2 海上试验
6 结语
猜你喜欢
摄影之友(影像视觉)(2020年2期)2021-01-14
影像视觉(2020年2期)2020-03-19
科学(2020年3期)2020-01-06
电子制作(2019年23期)2019-02-23
通信电源技术(2018年5期)2018-08-23
摄影之友(影像视觉)(2017年11期)2017-11-27
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31