
植保无人机旋翼风场模型与雾滴运动机理研究进展
2021-01-19 04:59张海艳兰玉彬许童羽于丰华
农业工程学报 2020年22期
张海艳,兰玉彬,文 晟,许童羽,于丰华
(1.沈阳农业大学信息与电气工程学院,沈阳 110161;2.华南农业大学电子工程学院,广州 510642;3.华南农业大学工程学院,广州 510642;4.国家精准农业航空施药技术国际联合研究中心,广州 510642)
0 引 言
植保无人机施药技术具有作业效率高、应对突发病虫害能力强、不受地理区域和作物长势的限制、不损害作物不留车辙及作业成本低等优点,是实现田间管理现代化的关键技术之一[1-3]。据农业农村部全国农业技术推广中心统计[4],与2014年相比,2019年无人机保有量增长了约72倍,年处理耕地面积增长了约108倍。植保无人机施药技术已发展为现阶段国内主要施药技术之一。虽然植保无人机施药技术的发展前景非常明朗,但着眼于当前,植保无人机施药技术依然存在许多不足,如:植保无人机旋翼风场结构及其变化规律尚缺乏成熟完整的理论成果[5-6];植保无人机旋翼风场与雾滴的交互机理及二者与作物的交互机理尚不明晰,尤其在雾滴与倾斜作物叶片表面间的交互机理及作物三维结构模型建立方面,还缺乏深入研究[7-11]。此外,现阶段还缺乏成熟的农业航空喷施药剂的雾化与蒸发模型等[10]。这也导致目前植保无人机在进行田间施药作业时,雾滴的飘移与沉积特性不够明确,影响植保无人机作业效果[12]。
为了解决植保无人机施药技术存在的问题,研究者进行了大量植保无人机施药技术相关的理论与试验研究。包括测试植保无人机在水稻[13-17]、小麦[18-21]、玉米[22]、棉花[23-24]、果树[25-26]和槟榔树[27]等作物与果树上的沉积效果,探究植保无人机旋翼风场的分布及其对雾滴沉积的影响[28],探究雾滴粒径[29]、无人机作业高度[22,30]、无人机飞行速度和亩喷洒量等因素[31-34]对雾滴在靶标作物上沉积、穿透、飘移和防治效果的影响规律。但这些研究普遍采用试验方法完成,由于田间自然环境复杂,随机因素非常多,导致基于试验研究方法很难获得规律性研究成果。受田间作物生长周期限制,每年可以展开田间植保无人机施药试验的时间有限;且田间试验的人力成本、时间成本和经济成本都很高。因此,田间试验法及基于该方法获得的研究结论的应用都受到限制。
深化植保无人机施药技术的基础理论研究,基于基础理论研究成果构建植保无人机施药效果预测模型,以模型为工具优化植保无人机施药参数,提高植保无人机施药效果,是一种经济、高效且经典的研究方法。结合植保无人机作业平台特点和施药特点,对植保无人机施药技术进行相关基础理论研究,建立植保无人机施药效果预测模型,不仅可以指导植保无人机进行施药作业,提高植保无人机施药效果,而且也可以丰富农业航空植保领域的理论研究。本文主要综述植保无人机施药技术相关基础理论研究现状,包括,无人机旋翼风场分布规律、无人机旋翼风场与作物冠层交互机理、雾滴传输过程中的运动特性和雾滴与作物交互机理等研究现状,结合上述植保无人机施药技术基础理论研究现状,为植保无人机施药技术的未来发展提出建议。
1 无人机旋翼风场分布特性及其与作物冠层间的交互作用
1.1 无人机旋翼风场分布特性
无人机旋翼下方的风场主要由无人机旋翼风场和外界环境风场共同组成,是影响植保无人机喷洒雾滴沉积与飘移的主要因素[5]。目前,领域内主要采用试验法和数值模拟技术探究植保无人机旋翼风场分布特性。本节将分别综述研究者基于这 2种方法在无人机旋翼风场分布特性方面的研究现状,并分析总结植保无人机旋翼风场的研究和发展方向。
1.1.1 田间试验法
结合植保无人机在田间的应用特点,李继宇等[35-38]设计了植保无人机旋翼风场测量系统(图1)。基于植保无人机旋翼风场测量系统,汪沛等[39]获取了Z3型单旋翼植保无人机在进行水稻授粉作业时不同方向的风速和风场宽度等参数,并探究了无人机飞行高度(6~9 m)、无人机飞行方向和自然风方向间关系(包括垂直、平行方向)与植保无人机旋翼风场宽度间的关系,为植保无人机进行水稻授粉作业时的作业参数选择提供参考。李继宇等[40-42]分别采集了单旋翼、8旋翼和18旋翼植保无人机为水稻授粉作业时水稻冠层的旋翼风场数据,包括水稻冠层X、Y、Z3个方向的风速、风场宽度和旋翼风风速的峰值特点等参数。并根据无人机旋翼风场参数,分析了无人机飞行高度、飞行速度和飞机及负载质量对旋翼风场分布的影响;结合旋翼风场有效宽度、电池耗电程度和农艺需求,为各类植保无人机筛选了合理作业参数。
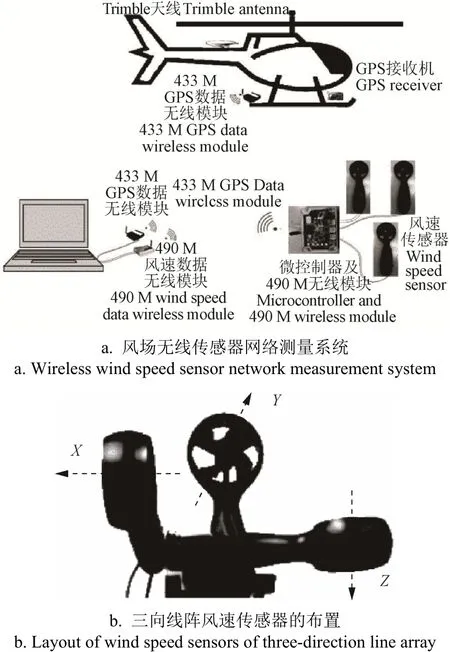
图1 无人机旋翼风场测量系统Fig.1 Wind field measurement system for UAV
上述研究表明,不同植保无人机旋翼结构(尤其不同植保无人机旋翼数量)产生的旋翼风场具有很大差异,包括冠层平面风场的覆盖宽度、风场内各方向风速的大小以及风场的分布规律等均不同。同时,不同作业对象,例如,为水稻施药和授粉,对无人机旋翼风场需求不同。因此,根据作业对象对植保无人机旋翼风场的需求和各机型植保无人机旋翼风场特点,合理选择植保无人机机型和作业参数。
1.1.2 室内试验法
田间试验在真实作业环境中进行,试验数据能比较真实地反映植保无人机旋翼风场对雾滴沉积与飘移的最终影响结果。但是,由于田间自然环境非常复杂,试验过程中可能存在很多随机自然因素的影响,受限于当前试验设备与方法,暂时无法剔除田间随机因素对田间试验结果的影响。此外,在试验成本与试验设备的限制下,田间试验虽然可以获取比较真实的植保无人机旋翼风场对雾滴沉积与飘移的影响结果,但田间试验尚不能获取植保无人机旋翼风场整体形态、旋翼风场随时间发展规律及局部涡旋形态细节等。
通过水或烟雾等显像物质将飞机旋翼风场可视化,基于高速摄影技术可以捕获飞机旋翼风场的局部涡流细节,结合图像处理技术,可以更详细地分析飞机旋翼风场随时间的发展规律。Baker等[43]等基于激光多普勒测速技术(Laser-Doppler Velocimeter,LDV)在水洞中获得了固定翼飞机尾流场的两个速度分量。Pino等[44]等通过三维粒子图像测速技术(3 Dimension Particle Image Velocimetry,3D PIV)在水洞中测量了固定翼飞机不同攻角下的速度场,并将此飞机速度场与成熟理论模型作比较,验证了该方法的可靠性,也提出基于3D PIV技术获取飞机尾流场范围受限的问题[45-46].
Tang等[47]通过癸二酸二乙基己酯(di-2-ethylhexyl)基板产生1μm的细雾将AF25B无人直升机的旋翼流场可视化,基于 PIV技术获取了该无人直升机瞬时和平均速度场信息(空间分辨率<0.005 m,时间分辨率<0.001 s),并基于文献[48]中的无人直升机旋翼流场的速度场数据验证了该方法的可靠性。
3D PIV技术是获取飞机尾流场信息的常用方法,但这种方法成本比较高,工作量较大。2016年,Aguilera等[49]提出烟雾线法(smoke-wire technique),一种成本比较低的可以将流场可视化的方法,是将油涂抹在直径为0.3 mm的镍铬铁合线上,利用脉冲电流使油迅速蒸发,蒸汽营造出烟雾环境。在风洞中,利用该方法,配合激光摄影技术,可将飞机流场可视化。作者利用成熟的理论模型验证了该方法的可靠性。2017年,Pericles等[50]在烟雾线法基础上,添加烟雾探针,结合3D PIV对某型固定翼飞机尾迹进行了试验研究,探究在翼尖安装小翼装置对固定翼飞机翼尖处流场和翼尖涡的影响。
LDV技术、PIV技术、烟雾法及烟雾探针等方法均已经应用在固定翼飞机的尾流研究中,PIV技术也已经开始应用于无人机旋翼风场分布特性的研究中,并且研究结果表明,与文献[39-42]中的室外试验法相比,PIV技术不仅可以将无人机旋翼风场可视化,获得更多无人机旋翼风场细节信息,而且可以量化分析无人机旋翼风场分布特征。与 PIV技术相比,基于烟雾法将流场可视化的方法成本比较低,在未来植保无人机旋翼风场研究中,PIV技术和烟雾法是2种值得特别关注的试验研究方法。
1.1.3 数值模拟方法
随着计算流体力学的发展和计算机计算能力的提高,基于数值模拟方法探究无人机旋翼风场分布规律也发展为一种主流研究方法。刘鑫[51]采用RNGκ-ε湍流模型模拟了LTH-100型单旋翼植保无人机在悬停和前飞2种状态下的旋翼流场速度分布特征,探究了不同速度的侧风对前飞状态下LTH-100型单旋翼植保无人机旋翼流场速度分布特征的影响。该研究的数值模拟结果表明,距离旋翼2 m处,气流开始发生卷扬,气流速度等势线分布开始变得紊乱,建议无人机作业高度低于2 m。
Yoon等[52]基于三维不稳定纳维斯托克斯方程构建了4旋翼无人机悬停状态下的旋翼流场,模拟结果表明,旋翼间的距离对悬停状态下的 4旋翼无人机系统的竖直方向力影响明显。Hwang等[53]基于相同方法建立了4旋翼无人机旋翼流场模型,探究了转子间及转子与机身间流场的交互作用,并建立了菱形与方形 2种形状的转子模型,以探究流场方向对整体流场的影响。模拟结果表明,飞机悬停状态下,转子间的空气动力学交互作用稍高于转子单独产生的空气动力学作用,而且转子间的气动交互作用使流场产生非常不稳定的波动变化。当无人机处于飞行状态时,由于局部推力的变化,无人机上游转子的翼尖涡和下洗流场会强烈影响下游转子的翼尖涡和下洗流场。
张豪等[54]等基于CFD方法,结合RNGk-ε湍流模型、多孔介质模型和滑移网格技术,构建了虚拟果园,并建立了自然风速下 6旋翼植保无人机悬停条件下的复合旋翼风场模型。分析了无人机悬停高度、果树生长阶段和自然风速等因素对无人机悬停条件下的旋翼风场分布的影响,研究结果表明,自然风破坏了旋翼下洗气流的中心对称状态,向下风方向出现后扬,且随着自然风速和悬停高度的增大,后扬距离随之增大;当无人机悬停位置沿逆风方向调整后,冠层内部上、中、下层气流平均速度均明显增加,并且变异系数降低,总体利于实现对靶喷雾。
1.2 无人机旋翼风场与作物冠层的交互作用
植保无人机旋翼风场发展至作物冠层后,会改变作物原来状态,驱使作物发生摆动,改变作物对雾滴的拦截概率,同时,改变雾滴碰撞于作物前瞬时的碰撞速度和入射角等参数,影响雾滴与作物茎叶后续的交互过程以及雾滴在作物茎叶上的最终粘附结果[55]。探究植保无人机旋翼风场与作物冠层间的交互作用,明确二者的交互机理及二者的交互作用对雾滴瞬时碰撞速度和入射角的影响,对丰富植保无人机施药技术基础理论研究,提高植保无人机施药效果有重要影响。
汪沛等[39-42]基于风场测量系统获取了单旋翼、8旋翼和18旋翼等3种机型无人机产生的旋翼风场在水稻冠层处的 3向风速和风场宽度等参数,研究结果表明,不同植保无人机旋翼结构在水稻冠层形成的复合风场差异很大,包括冠层平面风场的覆盖宽度、风场内各方向风速的大小以及风场的分布规律等均不同。2019年,Li等[56]将无人机旋翼风场研究范围扩展至水稻冠层内部,其通过皮托管传感器阵列获取了水稻冠层、冠层深 30 cm和冠层深 60 cm处无人机旋翼风场与水稻冠层耦合后复合风场的竖直方向速度,绘制了 3个高度处风速的等高线图,计算了等效面积(等高线和上边界包围区域的面积)和风场宽度。基于风速与 3个水稻冠层高度处等效面积衰减率间的关系,分析了无人机旋翼风场与水稻冠层间的交互影响。研究结果表明,等效面积的衰减率与无人机旋翼风场风速呈线性关系,冠层高度越低,等效面积衰减率越大。当高度由水稻冠层降至水稻冠层深 30 cm处,等效面积衰减率由47.9%降低至8.4%;当水稻冠层高度由30 cm降至60 cm,等效面积的衰减率由53.7%降至22.4%。
上述研究基于无人机旋翼风场在水稻冠层及冠层内部形成的复合风场的风速、风场覆盖宽度等参数分析了水稻冠层对旋翼风场在水稻冠层内部扩散的影响。无人机旋翼风场对作物形态与冠层结构特征也有影响,探究无人机旋翼风场对作物形态和冠层结构特征的影响可以增进研究者对雾滴在作物与叶片的交互过程和最终黏附结果的理解和预测。吴伟康[57]等基于 CC2530 ZigBee模块开发了一种三向风场无线传感网络系统,基于该系统获取了4旋翼无人机X、Y、Z方向的旋翼风场信息,利用低速风场区域数据进行线性回归分析,分别得到了无人机旋翼风场 Z向风速对水稻冠层的植被归一化指数(Normalized Difference Vegetation Index,NDVI),比值植被指数(Ratio Vegetation Index,RVI)和冠层覆盖率差异度differenceCCR的回归模型,并进一步对Z向风速与3项指标进行了方差分析处理,结果表明,Z向风速对水稻冠层NDVI,RVI与differenceCCR的影响在风场低速区不显著。Li等[56]发现无人机旋翼风场覆盖区域的水稻呈涡状向周围弯曲,水稻冠层形成的涡结构与无人机旋翼风场的覆盖范围和风速等参数呈比例关系;李继宇等[29]将无人机旋翼风场在水稻冠层形成的涡结构类比为一个深度小于植株高度的锥,并根据转子直径所覆盖的面积与等效面积衰减率建立了理想的锥模型,该模型为进一步探究旋翼风场对雾滴在水稻冠层的穿透率和水稻授粉效果情况提供理论基础。
现阶段,国内外研究者对无人机旋翼风场与作物间交互作用的研究,还主要集中在水稻这种作物上,而且,目前无人机旋翼风场与作物冠层交互作用的重点,还集中在探索无人机旋翼风场对作物冠层形态,以及风场在作物冠层上的覆盖范围等参数的影响。目前,少有研究量化分析无人机旋翼风场与作物冠层间的交互作用对雾滴沉积与穿透等方面的影响。因此,后续基于试验与CFD计算相结合的方法,获取无人机旋翼风场与作物冠层交互细节,以及无人机旋翼风场对作物茎叶形态扰动程度及其对雾滴入射角和碰撞速度等参数的量化影响,为雾滴在无人机旋翼风场下与作物茎叶间的交互机理研究提供理论基础,是该领域的另一研究方向。
2 雾滴在传输过程中的运动特性
2.1 雾滴的分散与蒸发
2.1.1 雾滴的分散
雾滴分散信息(droplet dispersion)是计算雾滴与无人机旋翼风场两相流模型的基础[58],也是分析雾滴粒径对雾滴沉降与飘移影响规律的基础[59],雾滴分散模型是构建植保无人机施药效果预测模型的基础子模型之一[60]。结合植保无人机施药技术特点,获取常用施药参数组合下的雾滴分散信息,建立雾滴分散信息数据集,构建雾滴分散模型是值得重视与投入研究的科研工作。
where Tmis the motor torque to meet the motor-pump group movement;J is the total rotational inertia of the motor-pump group.
王国宾[61]在风洞环境下通过激光粒度仪(欧美克DP-02)获取了TEEJET XF系列喷头、Lechler LU系列喷头和Lechler IDK系列喷头以及离心喷头在不同喷施参数下的雾滴分散信息,并对比了不同生产厂家相同型号喷头的雾滴谱信息。李继宇等[29]以XR-Teejet 110015型压力式扇形航空喷头为研究对象,在风洞实验室采用激光粒度仪(欧美克DP-02)获取了风洞风速2.5 m/s时,不同喷施压力条件下的雾滴分散信息。文晟等[59]针对农用植保无人机超低量喷施作业时,使用液力式喷嘴产生的雾滴粒径较大,离心喷嘴结构复杂、价格较高等问题,基于旋流雾化原理并采用模块化方法,提出一种超低容量旋流喷嘴结构,并采用激光粒度仪(欧美克DP-02)获取了该喷嘴的雾滴分散情况,用雾滴分散情况评价其喷嘴的雾化效果。
喷嘴结构、喷孔直径与喷施参数和喷施溶液的物理性质等是影响雾滴分散的主要因素,植保无人机旋翼风场会对雾滴分散产生二次影响。上述研究仅测试了部分喷嘴与部分喷施参数组合条件下,喷洒自来水时的雾滴分散信息。因此,根据无人机作业平台和喷洒药剂浓度较高等特点,基于真实作业参数和农药浓度配比,开展上述参数对雾滴分散的影响,获取雾滴分散信息。并基于已获取的雾滴分散信息和雾滴分散规律,建立雾滴分散信息数据库和雾滴分散模型,为后续探究无人机喷洒雾滴的沉降与飘移机理研究提供准确的数据基础和理论研究基础。
2.1.2 雾滴蒸发
雾滴粒径是影响雾滴沉降轨迹、雾滴飘移及雾滴与作物叶片交互过程和交互结果(即雾滴黏附)的重要因素之一[55,58-59]。当喷洒的溶液具有挥发性时,雾滴在沉降过程中的蒸发作用对雾滴粒径的影响是不可忽视的,量化分析雾滴在沉降过程中的蒸发作用对其粒径的影响对准确计算雾滴沉降轨迹及分析雾滴与叶片的交互过程有着重要的影响。1977年,Trayford等[62]建立了水基雾滴在空气中沉降过程中雾滴粒径随沉降时间减小的关系式,这是首个应用于航空施药中的雾滴蒸发模型。这个模型在时间步足够小,即保证在时间步内雾滴粒径、雾滴局部速度(droplet local velocity)和雾滴速度(droplet velocity)等参数保持不变的前提下有效,如果时间步太大,上述雾滴蒸发模型失效。2011年,Teske等[63]修正了文献[62]中的时间步算法和相对湿度的参数化影响,提高了雾滴蒸发模型预测准确性。文献[62]和[63]中的雾滴蒸发模型描述单个雾滴的蒸发,即使喷头喷洒多个多尺寸雾滴,上述 2个模型均假设喷头喷洒的每一个雾滴独立响应于环境气象条件。这 2个雾滴蒸发模型应用于AGDISP(Agricultural Dispersion) 模型(由美国农业部和美国宇航局联合开发,主要由飞机尾流模型、雾滴分散模型、雾滴蒸发模型、雾滴运动轨迹模型、大气稳定性模型和作物冠层模型等子模型组成,应用于林业、农业等航空喷洒的沉积计算)后,使 AGDISP模型在应用仿真程序中取得了合理的成功,并在近场中(near field)发生了预测不足的趋势,而在远场中(far field)出现了预测过度的趋势。2016年,Teske等[64]使用以前水基雾滴蒸发率测量方法测试了去离子水雾滴在单个线程上的蒸发率,开发雾滴蒸发数据集。同时,Teske在此次水基雾滴蒸发率测量中,检查了雾滴对其上风向雾滴蒸发的影响,补充了喷雾云(spray cloud)中被其他水基雾滴包围的各个水基雾滴的有效蒸发速率。分析结果产生了修正后的水基雾滴蒸发模型。2019年,Teske等[65]将文献[63]和[64]中的研究成果添加到 AGDISP模型中提高其预测准确性。
AGDISP模型主要应用于欧美的有人驾驶固定翼飞机喷施过程的分析及预测。由于与植保无人机相比,有人驾驶固定翼飞机作业过程中,喷施的雾滴粒径较大,且雾滴与空气的相对速度较高,因此,AGDISP模型中的蒸发模型不能完全适用于国内植保无人机施药技术应用。因此,结合国内无人机作业平台特点,基于D-Squared法则(D-Squared law),针对国内主要无人机飞防地区(如新疆、河南和江苏等)的气象条件,构建适用于国内植保无人机施药技术的雾滴蒸发模型,具有很强的现实意义。
2.2 无人机旋翼风场对雾滴的胁迫作用
植保无人机在稳定飞行过程中,会产生较强的旋翼风场,该风场对雾滴运动起到一定的胁迫作用。研究者探究无人机旋翼风场分布特性与发展规律的最终目的是为了更准确地探究和理解无人机旋翼风场对雾滴运动的影响。目前,研究者主要采用CFD方法探究了无人机旋翼风场对雾滴运动的影响。文晟等[58,66]基于格子玻尔兹曼方法的自适应细化物理模型,对单旋翼和 4旋翼无人机悬停和前飞两种状态下的旋翼流场进行了数值模拟。获取了 2个机型植保无人机翼尖涡流和整个旋翼流场及尾流随时间变化规律,并基于拉格朗日粒子轨迹法获取了不同粒径的雾滴在无人机旋翼风场作用下的运动轨迹。同时,对该模型的准确性进行了试验验证。数值研究结果表明,当无人机飞行速度大于3 m/s时,机身后方开始出现螺旋型尾涡,尾涡向机身后方的扩散距离与无人机飞行速度和飞行高度呈正比例趋势;当飞行速度为5 m/s、飞行高度为3 m时,38%的雾滴因螺旋尾涡而造成空中飘移,其中粒径小于100μm的雾滴约占总飘移雾滴数的80%。
杨风波等[67]结合雷诺平均N-S方程及Realizablek-ε湍流模型分别建立了 6旋翼植保无人机在空载和荷载3 kg这2种情况下的下洗气流三维数学模型,数值模拟结果表明,在机翼旋转诱导及外界气压的挤压下,下洗气流纵向主截面呈现出“收缩-扩张-再收缩”现象;“旋翼间干扰”使得下洗风场湍流效应明显,横截面的旋翼间区域出现了气流“引入”及“导出”区。另外,在无人机荷载3 kg条件下,杨风波等[67]引入了离散相雾滴,建立了无人机悬停条件下雾滴与无人机旋翼风场的三维两相流模型,结合喷头喷幅试验验证了该两相流模型计算雾滴运动轨迹的有效性。模拟结果表明,雾滴主要分布在旋翼间干扰明显的3个引入去和3个导出区。下洗流场区域内侧雾滴群交织,外侧大雾滴周向水平行程更大进而分布在外围;当雾滴粒径小于200μm时,雾滴运动范围无法覆盖全部的引入区,雾滴多分布在下洗流场区域中心;当雾滴粒径大于250μm时,雾滴运动区域逐渐覆盖所有引入区和导出区。Tang等[68]基于格子玻尔兹曼方法计算了 AF-25B型单旋翼无人机的旋翼风场分布情况及其与雾滴三维两相流模型,并通过文献[47]与文献 [48]实验结果验证了模型的准确性。研究结果表明,无人机飞行高度的增加,加剧了旋翼流场分布的不对称性,这致使雾滴分布也随着无人机飞行高度增加而更加不对称,在无人机左侧雾滴减少;同时,随着无人机飞行高度增加,雾滴沉积变异系数降低,雾滴沉积地更均匀,但雾滴沉积质量下降。
上述研究表明,单旋翼、4旋翼和6旋翼3个机型无人机的旋翼风场均会对雾滴沉降过程产生较强影响,尤其对粒径较小的雾滴(<100μm)。无人机飞行高度或飞行速度的增加,均会增强飞机尾流中马蹄涡对粒径较小雾滴(<100μm)卷携情况,增加雾滴飘移和沉积不均匀的风险。但是,当前研究的机型还比较有限,还未形成比较成熟的理论模型。在未来研究中,采用试验与 CFD计算相结合的方法,基于雾滴分散模型,准确地计算更多机型的无人机旋翼风场与雾滴两相流模型,探究无人机旋翼风场与雾滴间的交互作用,基于数理统计学知识,建立无人机旋翼风场与雾滴交互模型,准确地预测雾滴在无人机旋翼风场胁迫下的沉积与飘移情况,提高植保无人机施药效果。
2.3 雾滴飘移
农药飘移是指施药过程中或施药后一段时间,在非控制条件下,农药雾滴或颗粒在空中从靶标区迁移到非靶标区的一种物理运动[69]。雾滴的飘移总是不可避免地随着喷雾作业发生,几乎在所有的喷雾作业过程中,都存在一定的农药飘移。农药飘移造成的后果严重,不仅降低防治效果、增加成本、而且还会危及非靶标区域的敏感动植物、人类健康和生存环境[70]。与地面施药技术相比,无人机进行施药作业时的飞行高度比较高,这使无人机喷洒的药液发生飘移的潜力更大,无人机喷洒药液的飘移规律及减飘方法是领域内研究者高度关注的问题。
王潇楠[71]通过理论研究分析了雾滴粒径、雾滴运动速度、助剂溶液特性和施药机具等因素对雾滴飘移的影响,建立了雾滴飘移能量模型,并针对喷杆喷雾机和植保无人机两类施药机具分别建立了雾滴飘移测试系统与方法。曾爱军等[72]在风洞环境下,采用单旋翼与喷头组成的喷洒单元,测试了11种常用液力式喷头、4种代表性助剂在不同温湿度条件下的雾滴飘移潜在性。测试结果表明,4种助剂对雾滴飘移的影响不同,但均有降低雾滴飘移的效果,尤其在高温低湿情况下,推荐通过添加助剂减小雾滴飘移潜力。研究者根据具体施药条件,给出具体喷嘴与助剂组合推荐。王志翀[73]等基于国际标准IS022866和IS024253,采用分别在地面布置沉积和飘移收集器,在空中架设立体沉积和空中飘移收集器的方式,建立了一套针对低空低量植保无人机施药雾滴沉积与飘移效果的立体测试方法。并对 4个型号植保无人机分别搭载德国Lechler公司的IDK120-015和TR80-0067喷头进行测试,系统分析了无人机周边的总沉积,验证了方法的准确性。张宋超[33]等提出一种比传统检测方法更方便的CFD模拟方法,并通过对应的室外试验验证该方法的准确性。Xue等[74]在水稻田真实环境下测试了植保无人机飞行参数与自然风风速对雾滴飘移的影响。Wang[34]在菠萝果园测试了气象条件对雾滴飘移的影响。文晟[58]等基于CFD方法计算了S-40型单旋翼植保无人机旋翼风场与雾滴沉降两相流模型,提出雾滴粒径小于100um的雾滴约占总漂移雾滴数 80%的结论。陈盛德[75]也强调了雾滴粒径对雾滴飘移的影响。
国内研究者已经提出多个植保无人机喷洒雾滴的飘移测试方法,在风洞环境下测试了部分应用于无人机植保领域的喷头、药剂与助剂等对雾滴飘移的影响。本质上,上述研究均在分析无人机旋翼风场、雾滴粒径和自然气象条件等因素对雾滴飘移的影响。目前,研究者尚未重视雾滴蒸发对雾滴飘移的影响。在后续研究中,结合雾滴分散与蒸发规律的研究基础,采用风洞试验与CFD计算相结合的方法,继续探究植保无人机喷洒雾滴的飘移规律,为植保无人机田间作业提供理论指导。
3 雾滴与作物叶片表面的碰撞(交互)模型
雾滴与作物叶片的交互机理及雾滴在作物叶片上的最终黏附结果对雾滴有效沉积量有着关键性影响[76]。当雾滴沉降到作物冠层,撞击到作物叶片表面后,将产生粘附、反弹和飞溅等结果。其中,雾滴发生反弹和喷溅产生的子雾滴存在飘移和沉积到非靶标区域的风险[77]。叶片表面的喷雾沉积量是由每个雾滴在靶标作物上的最终结果,即粘附、反弹和喷溅等再分配决定的[78]。因此,深入研究喷洒的雾滴在作物叶片表面撞击行为的内在机理,建立雾滴在叶片表面的碰撞模型,对提高农药喷洒效率,减小环境污染和减少经济损失具有重要意义。
雾滴在叶片表面的碰撞过程包括雾滴初次碰撞到叶片表面和雾滴与叶片表面发生初次碰撞后产生的子雾滴的后续运动过程。一般默认雾滴与叶片表面的碰撞过程为雾滴与叶片的初次碰撞过程,雾滴与叶片初次碰撞后产生的子雾滴的后续运动称为雾滴与叶片表面的后-碰撞过程(post-impact)。下文将分别综述雾滴碰撞过程与雾滴后碰撞过程的国内外研究现状。
3.1 雾滴与作物叶片的交互过程
雾滴与水平表面发生碰撞行为后,在惯性力和雾滴与碰撞表面间的分子间引力(即粘附力)作用下,首先,雾滴会在水平表面上发生铺展运动,在雾滴铺展过程中,如果雾滴的惯性力大于雾滴的毛细力,雾滴将发生喷溅(shatter/splash),如果雾滴的惯性力小于雾滴的毛细力,雾滴将在水平表面上进行完整的铺展过程。当雾滴在水平表面上铺展到最大程度时,在表面张力作用下,雾滴开始发生回缩运动。雾滴在水平面上发生铺展和回缩过程中,会产生能量损耗,通常,研究者默认雾滴结束铺展和回缩运动后,如果雾滴动能为0,雾滴将粘附于靶标表面;如果雾滴动能不为0,雾滴将发生反弹[77]。
雾滴碰撞模型是基于雾滴与作物交互作用机理建立的预测雾滴在叶片表面碰撞行为的模型。雾滴碰撞模型由雾滴反弹模型和雾滴喷溅模型组成。首先,通过雾滴喷溅模型判断雾滴是否发生喷溅。如果雾滴发生喷溅,则无需执行雾滴反弹模型,如果雾滴未发生喷溅,则执行雾滴反弹模型,判断雾滴是否发生反弹。如果雾滴发生反弹,则默认雾滴未黏附于碰撞点;如果雾滴未发生反弹,则判断雾滴黏附于碰撞点,将该雾滴添加至沉积量计算中。本节主要综述雾滴碰撞模型的研究现状[7]。
3.1.1 雾滴反弹模型
通常,研究者根据雾滴碰撞到水平表面前、后动能与表面能的变化建立雾滴在碰撞表面上的运动方程。并且,通过对雾滴在水平面上的运动方程进行求解,判断雾滴在完成回缩过程时是否还有剩余的能量,足以使雾滴发生反弹。Attane等[79]提出一种二维能量平衡模型,这个模型描述了雾滴撞击到水平表面后铺展和回缩过程的能量变化,后来由Mercer等[77]扩展,扩展后的模型可以预测雾滴的反弹。但是,这个模型需要求解每个雾滴撞击后的二阶线性常微分方程,才可以判定每个雾滴是否发生反弹,计算量大,计算过程非常耗时。Mao等[80]利用高速CCD相机,在室温条件下,测试了不同碰撞速度、不同粘度、不同静态接触角、不同雾滴尺寸和不同表面粗糙度条件下,雾滴在水平表面上的运动过程(即铺展、回缩和反弹过程),并建立了雾滴最大铺展直径预测模型。
3.1.2 雾滴喷溅模型
由于雾滴的喷溅过程比雾滴粘附和反弹更难于理解,现在大部分研究都依赖于通过经验公式来预测雾滴是否发生喷溅。当雾滴的惯性力克服了溶液的毛细作用时,雾滴将发生喷溅。Mundo等[81]基于这一理论建立了预测雾滴发生喷溅趋势的经验关系式K=We1/2Re1/2(其中We为韦伯数,Re为雷诺数),并计算得到关键K值Kcrit=57.7,这个关键K值与雾滴喷溅边界相关性很好。如果雾滴碰撞K值大于Kcrit,雾滴将会发生喷溅,否则雾滴发生反弹或是发生粘附。K是一个描述雾滴溶液性质的参数,而Kcrit是一个与雾滴和碰撞表面性质相关的参数,在不同应用中,Kcrit值不同。所以,每次试验中的Kcrit值需要由其试验数据拟合获取,耗时耗力。2010年,Forster等[82]基于测量标准溶液 2个接触角来估计Kcrit值,经过多个试验验证,这种获取Kcrit的方法准确性很高,满足应用需求。这种Kcrit值估计方法适用性非常广,一直沿用至今。
3.1.3 雾滴碰撞模型
雾滴碰撞模型由雾滴反弹模型和雾滴喷溅模型组成。目前,主要有 2个雾滴碰撞模型,一个雾滴碰撞模型由反弹模型[77,79]和喷溅模型[81]组成;另一个雾滴碰撞模型由反弹模型[80]与喷溅模型[81]组成;第一个雾滴碰撞模型主要应用在AGDISP模型中。
上述雾滴碰撞模型均是基于雾滴在光滑水平表面上的碰撞过程建立。各种作物表面均具有其独特纹理结构,无绝对光滑的表面,并且几乎没有叶片绝对沿水平方向生长,大多数呈倾斜角度向阳生长,尤其玉米、水稻和小麦等作物。所以雾滴碰撞模型需要将作物叶片表面真实特征考虑进去。2014年,Dorr等[83]利用L-system建立了单个叶片真实的三维结构模型,基于Mao等[80]建立的雾滴反弹模型与Mundo等[81]和Forster等[82]建立的雾滴喷溅模型,建立了完整的雾滴碰撞模型。并假设反弹雾滴为球形,基于动能计算公式,计算出雾滴反弹速度。基于线性稳定性理论预测雾滴发生喷溅产生的子雾滴数量和每个子雾滴的能量,并假设子雾滴为球形计算了子雾滴的喷溅速度。
但在该模型中,当雾滴发生喷溅时,默认原雾滴发生完全喷溅,即原雾滴全部碎裂为子雾滴,且全部喷溅出去。该碰撞模型中的叶片虽然是根据真实叶片的三维结构建立的,但在该模型中,依然假设叶片水平放置,雾滴与叶片是垂直碰撞的。2015年,Dorr等[84]用雾滴碰撞的法向速度代替原雾滴喷溅模型中雾滴竖直碰撞速度,改进了Mundo等[81]的喷溅模型,建立了雾滴在倾斜表面上的喷溅模型。另外,Dorr等[84]假设在雾滴铺展过程中,雾滴前进铺展(advancing spread)为雾滴主铺展,雾滴在倾斜表面最大铺展面积与相同雾滴在相同碰撞条件下垂直碰撞于表面上时的最大铺展面积相同且雾滴碰撞速度的法向分速度可以定量分析雾滴侧面铺展情况,在这3个假设条件下,将Mao等[86]的雾滴竖直碰撞于光滑水平表面上的反弹模型扩展至雾滴碰撞于倾斜表面上的反弹模型。2016年,Dorr[85]利用L-system将单叶植物扩展为整株植物的真实三维结构模型,并在文献[83]和[84]建立的2个雾滴碰撞模型基础上,建立了雾滴与整株作物的碰撞模型,该模型将文献[83]中的雾滴喷溅模型扩展至全部喷溅和部分喷溅 2种情况。全部喷溅概念与上述相同,部分喷溅是指原雾滴一部分碎裂为子雾滴,喷溅出去,而另一部分粘附在叶片表面上,并提出雾滴喷溅铺展因子f(shatter spread factor)和雾滴持留比例参数P(pinning proportion factor),f表征雾滴在铺展过程中发生喷溅的时间,P表征雾滴发生喷溅后持留在作物表面的溶液体积与雾滴总体积的比例。
3.2 雾滴后-碰撞过程
雾滴与叶片的后-碰撞过程(post-impact)是指雾滴与叶片初次碰撞后产生的子雾滴的后续运动过程。雾滴与靶标表面发生碰撞后,产生的子雾滴的情况,尤其产生子雾滴的数量、粒径,速度和运动方向等,对判断子雾滴后续的运动轨迹及与作物再次碰撞过程都非常重要,影响整个碰撞模型预测的准确性。
上述所有碰撞模型默认反弹雾滴的体积和粒径与原雾滴体积和粒径相同,雾滴反弹方向为其镜面反射方向,反弹雾滴的速度由雾滴完成整个碰撞过程后所剩余的能量计算[83-85]。由于叶片表面并非绝对光滑,绝大部分作物的叶片表面都具有一定的粗糙度。叶片的表面特征会对雾滴的弹跳方向产生扰动,因此,单纯地采用镜面反射方法不能真实的模拟子雾滴的运动。2017年,丁维龙[86]等利用高速摄影机测量了雾滴在不同倾角叶片上的静态接触角,并拟合了其随叶片倾角增大的变化规律。同时,作者采用蒙特卡洛法重新计算雾滴的反弹方向,并将该计算方法推广到0~50°范围内任意倾斜的叶片上。
相比于雾滴的反弹运动,雾滴喷溅产生子雾滴的机理更复杂,研究工作更难展开。2000年,Aziz等[87]基于瑞利-泰来不稳定性理论(Rayleigh-Taylor instability)建立了雾滴喷溅后其子雾滴数量预测模型。2006年,Yoon等[88]提出一个能量平衡论证来解释雾滴发生喷溅后的能量分布,并总结了用于预测雾滴发生喷溅后产生子雾滴数量的线性稳定性理论。Dorr等[83-85]依据 Aziztffu[87-88]的子雾滴数量预测模型,预测了雾滴发生喷溅后产生的子雾滴数量,并且,假设雾滴喷溅后产生的子雾滴的粒径与体积完全相同,所以,每个子雾滴所携带的能量等于原雾滴发生完整碰撞过程后剩余的能量除以子雾滴数量,再根据每个子雾滴的能量计算其运动速度。AGDISP模型中雾滴发生反弹和喷溅后,子雾滴反弹方向依然采用镜面法获得,雾滴反弹和喷溅的速度通过乘法因子来获得[89]。
4 结语与建议
通过本文对无人机旋翼风场分布特性、无人机旋翼风场与雾滴和作物的交互机理、雾滴分散、雾滴蒸发、雾滴飘移及雾滴与作物叶片的交互机理等植保无人机施药技术基础理论研究现状的总结分析,发现现阶段植保无人机施药技术基础理论研究还存在以下几个问题:
1)植保无人机旋翼风场分布规律的研究比较分散,暂时不能形成成熟完整的结论。而且,植保无人机旋翼风场与作物冠层交互机理研究还未引起领域内研究者的重视,存在研究方法单一、针对的作物几乎仅水稻一种和研究的无人机机型有限等问题。
2)国内在植保无人机喷洒雾滴的运动特性方面的研究主要集中在无人机旋翼风场和雾滴交互机理及雾滴飘移规律研究方面;针对无人机作业平台特点及施药特点等对雾滴分散和雾滴在沉降过程中蒸发规律方面的研究较少;对雾滴分散数据的收集、建立雾滴分散数据集和雾滴分散模型以及分析雾滴蒸发规律及其对雾滴粒径的影响方面不够重视;且在现有的雾滴飘移研究中,尚未考虑雾滴蒸发对雾滴粒径的影响,进而对雾滴飘移规律的影响。
3)雾滴碰撞模型已经应用到国外的地面施药与航空施药技术中,但是,在国内植保无人机施药领域鲜有研究与应用。在雾滴后-碰撞过程方面的研究进展一直比较缓慢,目前,只能在诸多假设条件下预测雾滴发生喷溅后产生的子雾滴数量和雾滴的运动速度,并且,子雾滴运动速度预测模型相对简单。
针对植保无人机施药技术基础理论研究现存的问题,建议未来的研究从以下几个方面展开:
1)基于试验与 CFD计算相结合的方法,建立无人机旋翼风场与作物两相流交互模型,更多获取二者交互作用过程中的细节信息,更准确地阐明二者交互作用机理,为进一步分析二者间交互作用对雾滴穿透与沉积规律研究提供理论参考。另外,按植保无人机实际应用需求,基于CFD方法建立主流机型植保无人机在悬停和飞行状态下的旋翼风场模型,尤其飞行状态下的旋翼风场模型,结合已有的试验方法,探究植保无人机的机型、飞行速度、飞行高度和自然风等对无人机旋翼风场分布的影响。同时,在 CHARM 模型(Comprehensive Hierarchical Aeromechanics Rotorcraft Model)基础上,结合植保无人机平台特点,改进 CHARM模型,使其适用于植保无人机。基于上述研究成果,构建比较成熟的植保无人机旋翼风场模型,为构建植保无人机施药效果预测模型提供理论基础。
2)AGDISP模型中的雾滴蒸发模型已经比较成熟,但不完全适用于植保无人机施药技术,因此,结合国内无人机作业平台特点,基于 D-Squared 法则,针对国内主要无人机飞防地区(如新疆、河南和江苏等)的气象条件,构建适用于国内植保无人机施药技术的雾滴蒸发模型,具有重要的现实意义。
3)由于雾滴粒径、雾滴速度、雾滴溶液的物理性质和作物叶片表面的物理化学性质及雾滴入射方向等因素是影响雾滴与叶片交互机理和雾滴最后黏附结果的主要影响因素,在未来研究中,建议关注雾滴与作物叶片交互作用机理方面的研究,结合植保无人机施药技术的特点,重点研究无人机旋翼风场对雾滴分散与蒸发、雾滴运动轨迹、雾滴沉降速度、雾滴入射角及旋翼风场对作物冠层(或对作物茎叶摆动)的影响,建立适用于植保无人机施药技术的雾滴碰撞模型,为建立植保无人机施药效果预测模型提供理论基础。
猜你喜欢
作物杂志(2022年3期)2022-07-06
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
新疆农业科学(2021年11期)2021-12-23
农业机械学报(2021年11期)2021-12-07
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
科技研究·理论版(2021年20期)2021-04-20
军民两用技术与产品(2021年9期)2021-03-09
