奔驰网络架构发展与典型故障案例(上)
2021-01-22 06:36河南刘勤中
汽车维修与保养 2020年10期
◆文/河南 刘勤中
奔驰车载网络架构的发展史,基本上也是汽车网络架构的发展史,依据结构和所使用的技术进行分类,奔驰网络发展可分为4代(图1)。
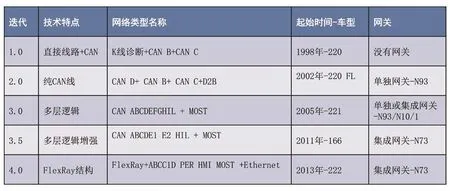
图1 奔驰网络架构发展历程
第1代的技术特点是直接线路(K线)+CAN总线。在这个版本网络架构中,虽然使用了CAN网络技术,但是没有控制单元作为网关。为了进行诊断,不同功能的控制单元不得不在X11/4(OBD接口)上设立专门的诊断数据线。从这一代开始,就设立了以CAN-B与CAN-C为核心的网络布局方式。更早的车型上网络只有CAN-C,再早的只有发动机电脑可以诊断。
第2代的技术特点是纯CAN线。在2002年220 FL(中期改款)上市时,网络架构发生了变化,同时期的其他车型,比如210也都已经采用了这种结构。相比第1代,第2代最大的不同是采用了单独的中央网关控制单元N93进行统筹管理,这样X11/4上的导线数量得到了减少。这种结构也是我们所熟悉的结构,也是很多其它品牌采用的结构。
第3代的技术特点是多层逻辑。随着2005年221车型的上市,标志着全新一代的网络架构的诞生,奔驰网络图(图2)也是从这时候开始变的复杂起来。
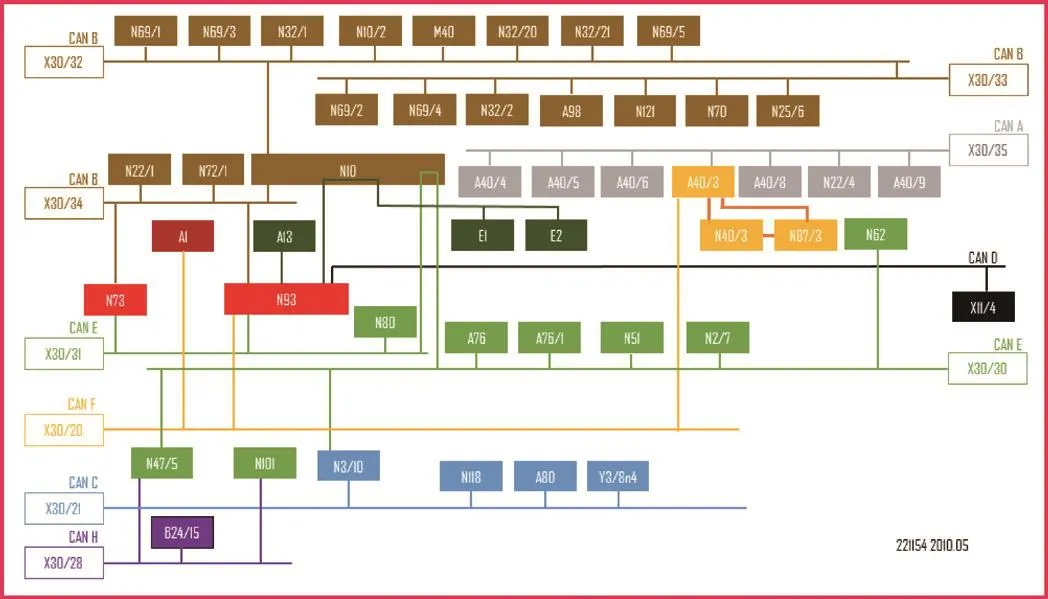
图2 奔驰第三代网络架构图
从第3代网络架构开始,奔驰对于网络功能有着非常明确的分类,分别对应不同的功能区域,包括CAN-A是远程信息处理网络,CAN-B是车内网络,CAN-C是传动网络,CAN-D是诊断网络,CAN-E是底盘网络,CAN-F是中央网络,CAN-G是前端网络,CAN-H是动态网络,CAN-I是传动网络,CAN-L是混动网络。再加上信号采集及促动控制模组SAM与熔丝盒集成在一起,线束插头很多。CAN-E虽然也经过信号采集及促动控制模组SAM(N10),但是只是“过桥”,目的是方便线束布置和装配,信号采集及促动控制模组SAM(N10)不是CAN-E的用户,而是CAN-B的用户,所以大家在看电路图时,容易迷失方向。
多层逻辑结构,只有一个网关是无法完成的,在网络中,有非常多的小网关,比如发动机控制单元N3/10,娱乐主机A40/3。如果小网关瘫痪,那么小网关下属的网络将不能被诊断到。这种多层逻辑结构,有着非常强的上下级关系。许多同行常用“大哥”、“小弟”这样的通俗化称呼来区分层级的高低。如:远程信息处理CAN(CAN-A)的网关娱乐主机A40/3就是挂在中央CAN(CAN-F)上,要再经过中央网关N93才可以与其它CAN总线或诊断仪进行数据通信,换句话说N93就是大网关,A40/3是小网关;又如:发动机控制单元是CAN-C的大哥(网关),如果大哥挂了,那么CAN-C上的变速器控制单元Y3/8n4、换挡模块控制单元A80、油泵控制单元N118也就无法通信。
当然不是所有同时连接两条CAN线的控制单元都是网关,比如点火开关N73,连接了车内CAN-B和底盘CAN-E,但是它并不是网关,只是他需要单独与两条CAN总线进行数据交换,但并不承担两条总线之间的数据交流。
奔驰221车型的网络架构作为母版,在减配后,使用在了后续生产的其它车型上,其中204和212车型的中央网关N93集成到了信号采集及促动控制模组SAM(N10/1)中。当时SUV车型还在使用第2代的网络架构。同时期的其他品牌车型的网络架构就简单许多,一般是一个中央网关负责全车电脑的通信。
第3代网络架构另外一个改进就是通信娱乐系统由第2代采用的D2B技术升级为MOST技术,均为光纤传输,传输速率提高了4倍。
第3.5代(图3)的技术特点是多层逻辑加强版。当第3代网络架构运用到SUV车型后,恰逢2011年166(ML)车型上市,加之新的技术与166的定位,第3代网络架构发生了细微变化。这种细微变化也为第4代网络架构打下了基础。这些变化主要体现在底盘CAN-E上,出现了CAN-E1和CAN-E2两条底盘CAN,在功能区域上,都属于底盘,都需要底盘的数据,但是又有不同,所以不得已使用数字来区分了。
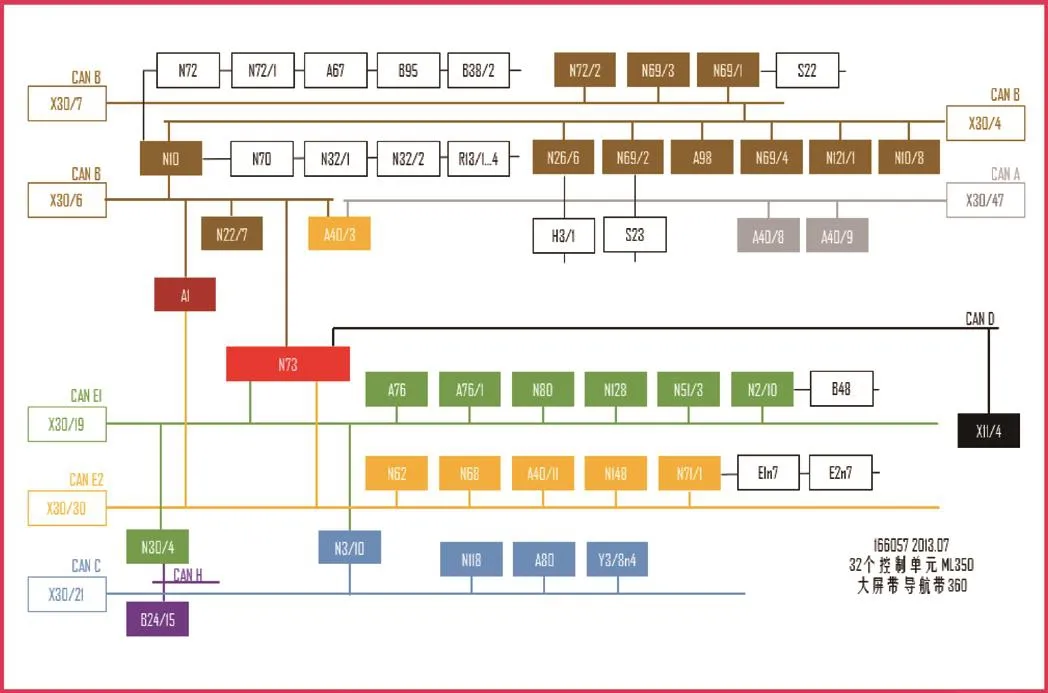
图3 奔驰第3.5代网络架构图
除了底盘CAN的区别,原来独立的中央网关N93集成到了点火开关N73中,其实集成与独立(如:传动系统控制单元N127从发动机控制单元N3/10中独立出来,N3/10不再承担网关的职能,只专注于发动机本身的管理和控制,对外交流等网关的功能由N127承担),在奔驰车型技术的发展中都出现过,但随着科技的发展,集成化是大势所趋。
第4代的技术特点是采用FlexRay结构(图4)。2013年奔驰222车型的上市,标志着FlexRay通信技术正式在奔驰车型上广泛使用。在此基础上,减配后的FlexRay网络,陆续被205、253、213等后续车型采用。
第4代网络架构解决了第3.5代的命名的问题,取消了E1和E2的叫法。在功能区分上,参考了第3代的分法。
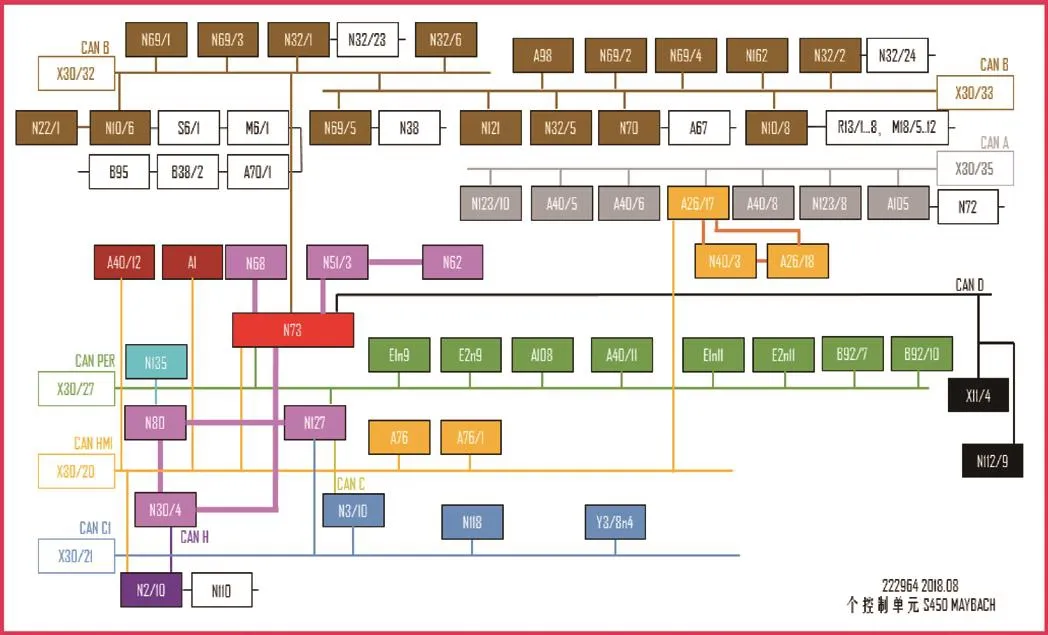
图4 奔驰第4代网络架构图
第4代网络架构中,FlexRay的加入,替代了之前的底盘CAN-E1或者底盘CAN-E。在第3代或者第3.5代中,大灯都归入了底盘相关的网络中。由于大灯模块不需要FlexRay高速传输,在第4代中还是安排在CAN网络中,由于大灯在车辆周围,所以有了外围CAN PER。
第4代中CAN HMI和第3代中的中央CAN(CAN F)有着相同的定位,都是挂娱乐主机的地方。那么用户界面也就容易理解了。安全带A76和A76/1、仪表A1、娱乐主机A26/17,这些都是驾驶员能直接接触和看到的模块,所以起名用户界面CAN HMI。
此外随着213 FL中期改款引入新一代方向盘后,由于带触摸控制功能的按钮组N163/1和N163/2数据量的增加和传输速度的需求,转向柱管模块控制单元N80和方向盘电子装置N135由LIN线通信升级为方向盘CAN(CAN LR),转向柱管模块控制单元N80构成与其他总线系统相连的控制单元之间的数据交换接口(网关),传输速率为 125 kbit/s。
FlexRay技术本身的结构,并没有固定下来(这说明正在发展过程中),在不同车型,不同配置下,FlexRay的结构都有区别。在222车型上,共有6条FlexRay,星形结构,N127是第2条FlexRay的终端节点;而205只有1条FlexRay,线形结构,N127是中间节点;
在2015年后,奔驰采用了新的车型命名体系,这也意味着轿车与SUV两条产品线的融合,这种融合也会体现在技术的融合上,第4代的网络架构也在不断的发展中,比如在2018上市的177车型和2019年上市的167车型。
在新款车型中,很多功能相近的模块,进行了集成,比如205和213横摆率传感器B24/15被集成到气囊控制单元N2/10中,177的空调控制单元N22/1和整条CAN B的分配器都被集成到了SAM中,213的360度摄像头控制单元N148集成到驻车控制单元N62中,167的无钥匙进入/起动(KG)控制单元N69/5集成到了电子点火开关N73中等等。每一代网络架构的迭代,都会传承上一代的优点,又会根据芯片和通讯技术的发展以及新功能的需求进行相应的调整和创新,不断的优化和集成。
下面通过3个与网络相关的故障案例,总结网络故障的诊断和测试的方法和技巧。
猜你喜欢
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01
太阳能(2015年7期)2015-04-12
汽车维护与修理(2015年5期)2015-02-28
电子设计工程(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年9期)2014-03-01
河南科技(2014年18期)2014-02-27
河南科技(2014年16期)2014-02-27