汽车驾驶辅助装置详解(上)
2021-01-22 06:36北京李玉茂
汽车维修与保养 2020年10期
◆文/北京 李玉茂
一、预备知识
1.国际汽车工程师学会于2014年发布,自动驾驶技术分为L0至L5共6个级别:L0—非自动化,L1—辅助驾驶,L2—部分自动化,L3—有条件的自动驾驶,L4—高度自动化,L5—全自动化。现在世界上最先进的车辆是L3级,汽车装备的各种驾驶辅助装置,就是为了迈向L5级。
2.测距传感器利用机械波、电磁波等进行工作。机械波,由机械振动产生,只能在空气中传播,机械波包括声浪、超声波。声波,人耳能听到的频率为20Hz~20kHz,汽车用于扬声器、蜂鸣器。超声波,频率高于20kHz,人耳听不到,方向性好,反射能力强,用于前/后驻车、泊车辅助、涉水深度传感器,相关装置安装在保险杠等处,从车辆外观可以看到。电磁波,具有电磁辐射特性,在空气和真空中传播,频率由低到高排列:无线电波-微波-红外线-可见光-紫外线……无线电波,频率300kHz~300MHz,用于胎压传感器、汽车钥匙。微波,频率300MHz~3000GHz,包括分米、厘米、毫米、亚毫米波段,穿透性强,用于ACC、盲点监测、倒车车侧传感器,安装在车标或保险杆里面,从车辆外观看不到。红外线,用于汽车烤漆和测温仪。可见光,人眼感知频率为380~750THz。紫外线,用于汽车空调杀菌。
二、ACC自适应巡航系统
ACC的中文是自适应巡航系统,多装备在中高档及以上乘用车上。ACC是CCS(巡航系统)的升级版,设有单独的ACC控制单元,是一种智能化的自动控制系统,属于自动驾驶技术的L2级。大众帕萨特前车标后面装有雷达传感器(图1),频率76.5GHz,有效探测范围150m,水平视角12°,垂直视角±4°,车速范围30~210km/h,通过多普勒效应进行速度比较。
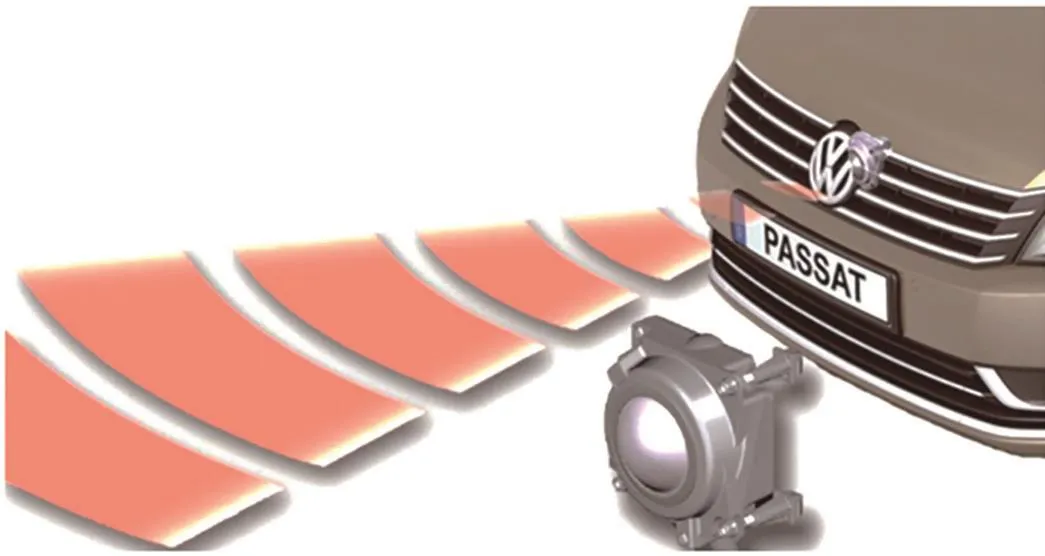
图1 雷达传感器
传感器持续扫描前方道路,轮速传感器提供车速信号,与前车之间的距离过小时,ACC控制单元通知发动机、制动等控制单元,降低发动机输出功率,适当采取车轮制动,依据驾驶人的设定,自动控制跟车距离。当前方车辆突然紧急制动,ACC控制单元发出声光信号,通知驾驶人立即踩制动踏板。本车与前车之间增加到安全距离时,ACC控制单元按设定的车速巡航。
ACC系统激活,组合仪表显示“主动状态”或“被动状态”,主动状态是系统监测前方移动物体的相对速度,依据驾驶人设定的安全距离自动控制车距。被动状态是系统监测前方移动物体的相对速度,不进行车距控制,必须由驾驶人控制车距。ACC由主动状态转为被动状态的条件:按“巡航取消”键、踩制动踏板、长时间踩加速踏板、ABS、ESP、TCS功能介入工作。
三、IACC集成式自适应巡航系统
IACC的中文是集成式自适应巡航系统,装备在新款乘用车上,例如长安CS75,该车是A+级SUV车。IACC采用多传感器融合技术,融合毫米波雷达、多功能摄像头和导航地图(与高德合作),感知道路环境,通过发动机、制动系统、转向控制系统,自动加速系统、减速及转向系统,将车辆保持在车道内或跟随前方目标车轨迹自动驾驶。IACC激活后,有以下功能。
1.单车道辅助驾驶,车辆自动保持在车道内行驶。
2.偏离车道辅助驾驶,车速65km/h以上,车辆即将偏离车道时,仪表发出纠偏提示,并自动将车辆纠正到车道内。
3.交通拥堵辅助驾驶,堵车情况下,车辆自动保持在车道内行驶或跟随前车行驶。
4.弯道辅助,摄像头识别出前方弯道,如果当前车速过高,自动减速进入弯道,出弯道后自动加速到设定车速。
5.预警辅助,高速行驶时距前车距离过近,提醒驾驶人注意车距;与前车存在碰撞危险,警示驾驶人采取制动;碰撞即将发生且驾驶人未制动,车辆主动制动。
6.语音设定巡航速度,也可以手动设定。
7.智能限速辅助,巡航车速大于识别到的限速标志牌,IACC自动将标志牌限速设定为巡航速度。
8.IACC增加“L2级自动驾驶”键(图2)。

图2 L2级自动驾驶键
四、预碰撞安全系统
大众汽车公司将预碰撞安全系统命名为Front Assist,中文是前部辅助系统,俗称“碰撞报警/主动刹车”。该系统与ACC协调工作,ACC在巡航状态或关闭状态该系统均工作,防止碰撞前车,将制动距离缩至最短。前车标后面的雷达传感器,监测前方移动和静止目标的距离,分步完成预处理车辆、警告驾驶人、主动制动干预。设有2个子系统,HBA(液压制动辅助系统)和ATB(自动部分制动)。
1.预处理车辆,车速5~210 km/h,系统感知碰撞危险性略高,HBA预充制动液压力,并自动降低触发阈值。
2.警告驾驶人,车速30~210 km/h,感知碰撞危险性较高,分两步警告驾驶人:(1)预警告,发出警告音及图标;(2)主警告,发出制动耸车警告。
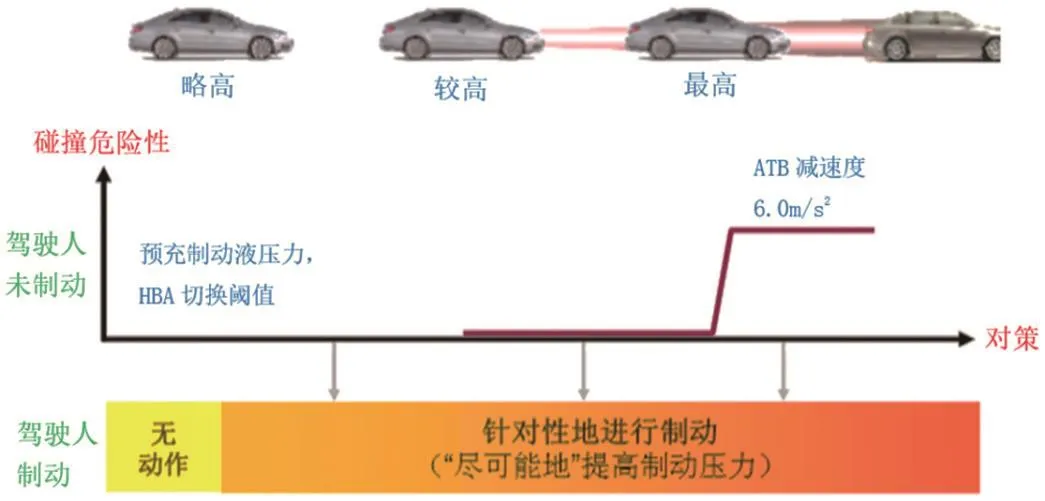
图3 城市紧急制动
3.主动制动干预,车速5~210km/h,感知碰撞危险性最高,如果驾驶人未采取制动,(1)HBA预充制动液压力升高;(2)ATB自动制动,车速小于30km/h执行“城市紧急制动”,车速大于30km/h执行“自动部分制动”。
城市紧急制动(图3):(1)感知碰撞危险性略高,HBA预充制动液压力,执行“较高敏感度”阈值,不发出警告;(2)感知危险性较高,HBA切换到“高灵敏度”阈值;(3)感知危险性最高,ATB以6.0m/s2减速度制动,此时驾驶人必须紧急制动,否则会发生碰撞事故。
自动部分制动(图4):(1)感知碰撞危险性略高,发出图像及声音警告,HBA预充制动液压力,切换至“较高敏感度”;(2)感知危险性较高,如果驾驶人未制动,发出短时制动耸车警告,切换至“高敏感度”;(3)感知危险性最高,如果驾驶人仍未制动,ATB以1.0m/s2减速度制动;(4)如果驾驶人仍然置之不理,ATB以3.5m/s2减速度制动,此时驾驶人必须紧急制动,否则发生碰撞事故。
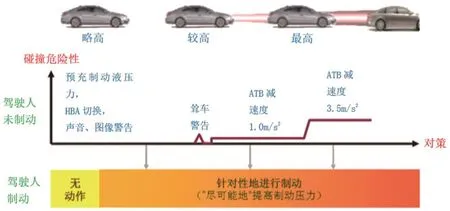
图4 自动部分制动
五、车道偏离系统
车道偏离系统的功用是行车中识别偏离车道,通过显示屏、蜂鸣器、转向盘振动发出报警,适于长途及疲劳驾驶。有些车型只作警示,有些车型通过助力电机自动修正行驶方向。大众CC车道偏离系统(图5),主要由安装在后视镜底座的摄像头和偏离预警控制单元、电动助力转向控制单元、助力电机、转向柱控制单元、转向盘、组合仪表组成。

图5 车道偏离系统
摄像头扫描道路前方20~60m范围,每秒钟拍摄25帧图像,当车辆轻微偏离车道,如图6所示,液晶屏显示“道路辅助,请控制转向”、蜂鸣器发出锣音,转向盘振动(奥迪车有此功能),该系统通过转向系统自动修正行驶方向。

图6 车道偏离报警
工作原理:
1.识别车道线,摄像头拍摄前方路面,根据标线与路面的灰阶对比值确定标记点。
2.计算车道,弯道半径大于250m自动切换为被动模式。被动模式只是监测,主动模式监测、报警、修正。
3.偏离修正,(1)未开转向灯出现偏离,系统认为是客观偏离,转向盘修正力矩小于3N·m,修正时间小于100s;如偏离过大,说明驾驶人忘开转向灯而变换车道。(2)开转向灯出现偏离,系统认为是主观偏离,由主动模式自动切换至被动模式,变道完成后自动恢复主动模式。
4.主动模式条件,车速小于65km/h,道路宽2.45~4.60m,摄像头视野清晰必须能够识别出道路边界,车道标志线虚长不超过实长的2倍。
5.车道偏离指示灯有3种状态,关闭偏离开关指示灯熄灭,打开偏离开关处于主动模式为绿色,处于被动模式为黄色(图7)。
6.转向盘振动,转向盘上装有振动电机,握住转向盘双手感觉振动。

图7 车道偏离指示灯
7.如果车道偏离功能与ACC功能同时启用,ACC功能优先。
六、并线辅助系统
1.沃尔沃将并线辅助系统命名为BLIS,中文是盲点信息系统。车身两侧后部装有雷达传感器,探测车外后视镜盲区内的车辆(图8)。驾驶人在变换车道时,BLIS提醒驾驶人注意盲区内同方向行驶的车辆,在多车道、大交通流量的道路上最能发挥作用。
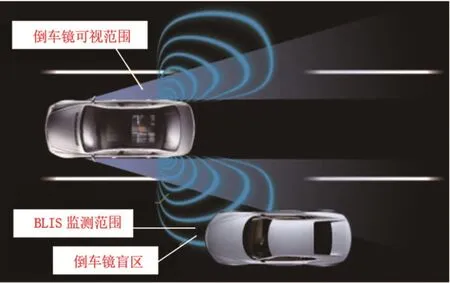
图8 BLIS监测范围
主要由盲点监测开关、摄像机模块、雷达模块、盲点监测警示灯等组成。盲点监测开关(图9)集成在中控台控制面板,盲点监测开关信号首先进入自动空调控制单元,再由其发送到CAN总线。

图9 盲点监测开关
摄像机模块与电动后视镜集成在一起(图10),摄像机模块对拍摄的照片进行处理,同时通过LIN线获取车速信号,识别本车是否正在超越其他车辆,或被其他车辆超越。
两个雷达模块安装在后保险杠两侧的内部(图11),当雷达传感器探测到物体时,通过盲点监测警示灯警示驾驶人。
两个盲点监测LED警示灯安装在两个前门三角窗(图12),若盲区内有车辆,LED点亮呈橘黄色并闪烁。
2.奥迪汽车公司将并线辅助系统命名为Audi Side Assist,中文是侧向辅助系统,两个倒车镜分别装有频率为24kHz的超声波传感器,监测汽车侧后方70m范围内的情况。车速大于60km/h,侧向辅助系统激活,当检测到盲区内有汽车出现,系统进入“提示”阶段,倒车镜上的LED黄色灯点亮(图13)。LED点亮不会干扰驾驶人,因为驾驶人直视倒车镜才能看到LED。
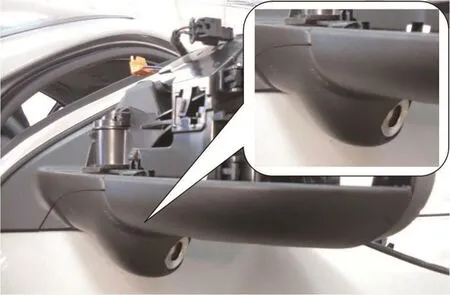
图10 摄像机模块
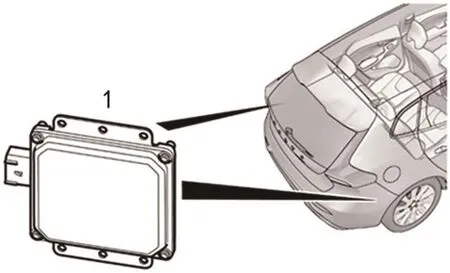
图11 雷达模块
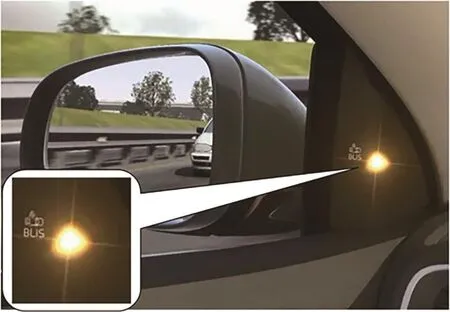
图12 盲点监测警示灯
驾驶人打开转向灯准备变换车道,当检测到盲区内有汽车出现,LED亮度增强并增加闪烁频率,系统进入“警示”阶段,驾驶人不会忽视,因为驾驶人只要观察倒车镜,就能看到LED闪烁。警示灯的亮度随环境亮度而变化,也可以通过MMI(多媒体交互系统)设置LED灯亮度。

图13 警示灯点亮
七、疲劳驾驶识别系统
1.大众汽车公司将疲劳驾驶识别系统命名为MKE,中文是疲劳驾驶识别系统。车速65~200km/h,MKE监控驾驶人的驾驶动作和车辆行驶中的相关信息,分析驾驶人的疲劳程度,当判断驾驶人出现疲劳,液晶屏显示“咖啡”标识(图14),同时发出一声“锣音”。

图14 “咖啡”标识
下列情况MKE将疲劳估计值复位:关闭点火开关、驾驶人解开安全带且打开驾驶人车门、停车时间大于15min、长时间低速行驶。如果紧接着快速行驶,MKE重新计算行驶状况。下列情况MKE功能受限:车速小于65km/h、车速大于200km/h、恶劣天气、运动风格驾驶。
(未完待续)
猜你喜欢
学苑创造·A版(2023年5期)2023-06-04
教书育人(2020年11期)2020-11-26
中国交通信息化(2019年9期)2019-11-16
汽车维护与修理(2018年1期)2018-04-04
青年歌声(2017年9期)2017-03-15
中国照明(2016年4期)2016-05-17
中国老区建设(2016年6期)2016-02-28
中国医学装备(2015年10期)2015-12-29
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27