
基于抓斗船的挖掘高平整度模型研究
2021-01-26 03:55袁子豪丁志兵
江苏船舶 2020年6期
袁子豪, 丁志兵
(1.中交广州航道局有限公司,广东 广州 510000;2.镇江市亿华系统集成有限公司,江苏 镇江212011)
0 引言
抓斗船对不同挖掘深度及不同土质的挖掘适应性较强,与其他类型挖泥船相比,具有设备简单、挖泥机械的磨损部件少、船舶造价较低等优点。但抓斗挖泥船对挖掘过程中的平面定位和自动定深控制水平还较低,挖掘平整度较差。目前国内抓斗船的深度检测都是检测吊点钢丝绳长度,每次挖掘后,都会行成一个一个的凹形坑,这种传统的抓斗很难满足沉管隧道基槽的要求。
为提高现有抓斗挖泥船定位定深控制精度[1],提高挖槽平整度,减少基建开挖废方,缩短工期,本文以控制抓斗船的挖掘平整度为目标,根据抓斗船特性的预判及工作特性[2-3]建立了平面定位模型、潮位RTK模型、抓斗计算模型,并对抓斗船挖掘过程中产生的误差深度分别进行修正,以提高各个过程中深度的精度。
1 项目施工背景概述
沉管隧道基槽设计复杂,开挖精度要求高,施工难度大。项目挖掘要求如下:
纵向槽底E31管节标高-25.187~-24.160 m,E32管节标高-24.160~-23.132 m;两节管的槽底纵坡角度均为-2.980°;横断面设置了多级边坡,按1∶3、1∶5、1∶7不同坡比放坡。
沉管隧道基槽水下挖泥施工分为粗挖、精挖2个施工阶段。精挖层与粗挖层显示见图1。

图1 精挖层与粗挖层显示
粗挖阶段是指由原泥面至离设计底标高约2 m 间泥层的开挖作业。基槽粗挖施工前要对施工区域泥面扫测,了解施工区水深等水文资料。
精挖阶段是指粗挖完成后至设计底标高间泥层的开挖作业。在本工程中根据质量验收标准,主要是指隧道结构底板以下部分的基槽边坡线往上2 m间泥层的开挖作业。
2 高平整度(精挖)工艺设计
沉管隧道基槽粗挖施工后,结构底板以下部分边坡成型区、槽底精挖层由具备高平整度的抓斗船精挖,以避免抓斗船超宽超深过多破坏精挖层。
高平整度抓斗船精挖作业按照分段、分层、分条原则进行施工,其施工工艺如下:
(1)分段长度与基槽粗挖相同,段与段之间搭接5 m重叠覆盖施工。
(2)分层主要根据边坡成型区及槽底精挖层厚分2层,每层厚度约1 m进行施工控制。施工中第1、2层相邻斗之间在平行基槽方向与垂直基槽方案各按1/3斗重叠布斗。
(3)分条主要考虑船舶宽度,一般取15 m。条与条之间搭接宽度为3 m重叠施工。
完成工作后要根据验评标准对基槽进行验收。
3 高平整度模型研究
3.1 现状分析
3.1.1 平面定位
目前某些抓斗挖泥船配置了DGPS(平面位置精度小于1 m,属于亚米级)信号接收装置,并将信号接收天线安装在吊臂顶部起重葫芦片上方,获得该点的平面坐标,然后根据垂直投影原理确定抓斗平面位置。但DGPS受精度的影响,对于带剖度的基槽,挖掘平面精度明显不足。
3.1.2 潮位
潮位遥报仪分为主机端和用户端。主机端架设在固定位置,实时测量当前位置的潮位并将潮位定时发送至各个用户端;用户端安装在抓斗船驾驶室内,接收主机端的潮位信号。潮位遥报仪直接影响抓斗深度(实际抓斗挖深=抓斗检测深度 + 潮位),从而造成潮位误差。该方式存在以下2点问题:
(1)潮位遥报仪必须架设在陆地或岛礁上,距离抓斗施工区有一定距离,从而导致潮位滞后或提前,不能准确显示抓斗船当前的施工潮位。
(2)潮位遥报仪由蓄电池供电。为降低潮位遥报仪耗电量,设计时采用定时发送方式(发送间隔为5 min)。
3.1.3 抓斗深度测量
系统利用光电传感器或编码器检测钢丝绳滚筒的转角,用以计算钢丝绳下放长度;计算机根据检测的传感器信号转换为钢丝绳深度,再根据当前接受的潮位,计算出抓斗的深度。在闭斗过程中,抓斗在下探力的作用下会下探一定深度,且抓斗闭斗过程挖掘的形状为扇形状(中间低,两边高),达不到基槽精挖要求。
3.2 高平整度模型
为提高抓斗船的挖掘精度,达到基槽挖掘的精挖要求,根据目前抓斗船现状,进行建模研究,从而达到高平整度挖掘效果。
3.2.1 平面定位模型
平面定位主要功能是确定落斗的位置,与工程施工图挖槽位置有机地结合起来。为提高平面定位精度,模型设计中将采用高精度的RTK代替DGPS。RTK基站采用中海达iRTK5高精度的1+3模式(陆地架设1个基站,船舶安装3台移动站)。
船舶的GPS安装位置示意图见图2。GPS1安装于抓斗吊机顶部,GPS2安装于吊机旋转中心,GPS3安装于船舶驾驶台顶部。GPS1直接定位出抓斗挖掘位置,GPS1、GPS2计算出抓机摆臂旋转角度及旋转中心坐标;GPS2、GPS3计算出船舶的位置及船舶角度。根据RTK的特性,定位精度可达到5 cm,足以满足基槽定位的精度。
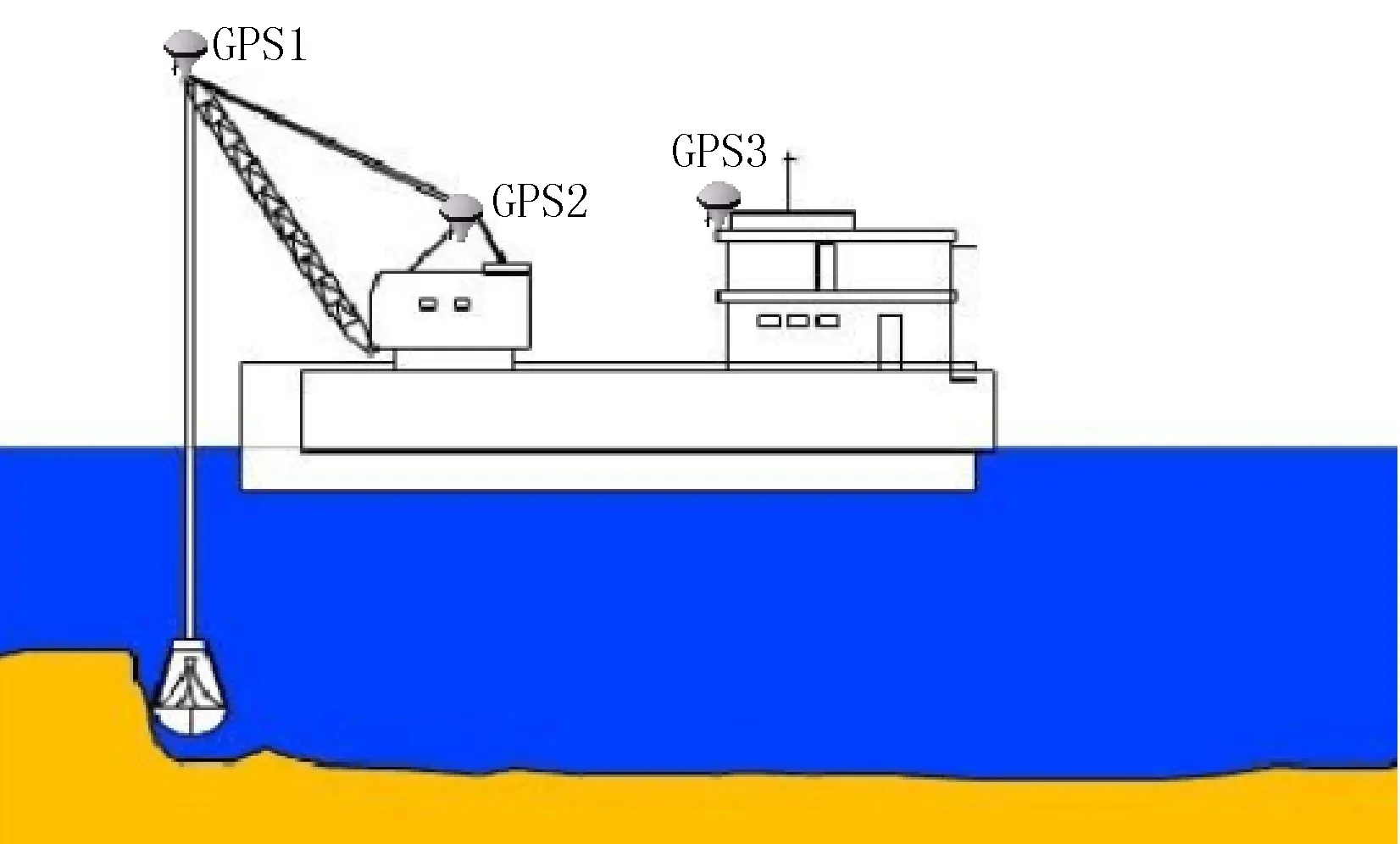
图2 船舶的GPS安装位置示意图
3.2.2 潮位RTK模型
潮位主要表示当前水位距离高程的偏差(挖掘泥层的深度均以该高程为基准点),抓斗深度零位校准为水面,根据潮位计算出抓斗与泥层的深度差。
由于潮位遥报仪达不到精度要求,因而引入潮位RTK模型。潮位RTK模型包含的设备包括:安装于船舶驾驶台顶部的GPS3、船舶两舷的吃水传感器、船舶中心的横斜仪。GPS3主要用于测量GPS3处船体位置的高程;船舶两舷的吃水传感器对称安装,用于测量船舶吃水;倾斜仪用于测量船舶的横倾角度、纵倾角度。
在施工过程中,由于抓斗位置及GPS3安装位置受船舶横倾角度、纵倾角度的影响,导致两处的实际高程有偏差。为计算出抓斗位置实际高程值,系统算法如下:
(1)抓斗深度零位对应的高程计算。
式中:H为施工过程中抓斗位置高程;Ht为GPS3测量的GPS高程;Hg为GPS3安装位置至船底的距离;α为船舶的横倾角度;β为船舶的纵倾角度;h1、h2为左舷、右舷的船舶吃水;HΔ为抓斗深度过程中深度偏差补偿。
(2)抓斗施工过程中的深度偏差补偿计算。
HΔ=L(1-cosγ)sinαsinβ
式中:γ为吊臂仰角;L为抓斗吊臂投影长度。
3.2.3 抓斗计算模型
抓斗计算模型主要是建立抓斗开度与齿头深度偏差表,对抓斗不同开度下的深度进行修正。抓斗不同开度深度变化见图3。抓斗齿的深度在不同的开度下,深度变化是较大的。不同开度下抓斗齿的深度(以8 m3抓斗为例) 测量的数据见表1。
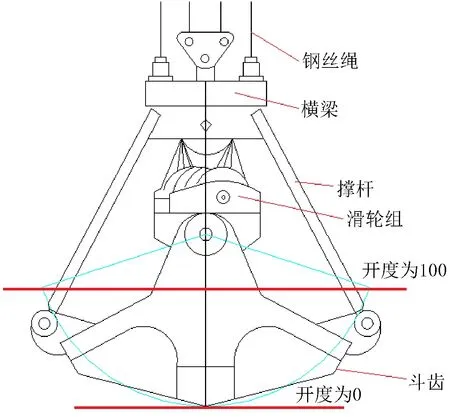
图3 抓斗在开度0和100%下的深度变化
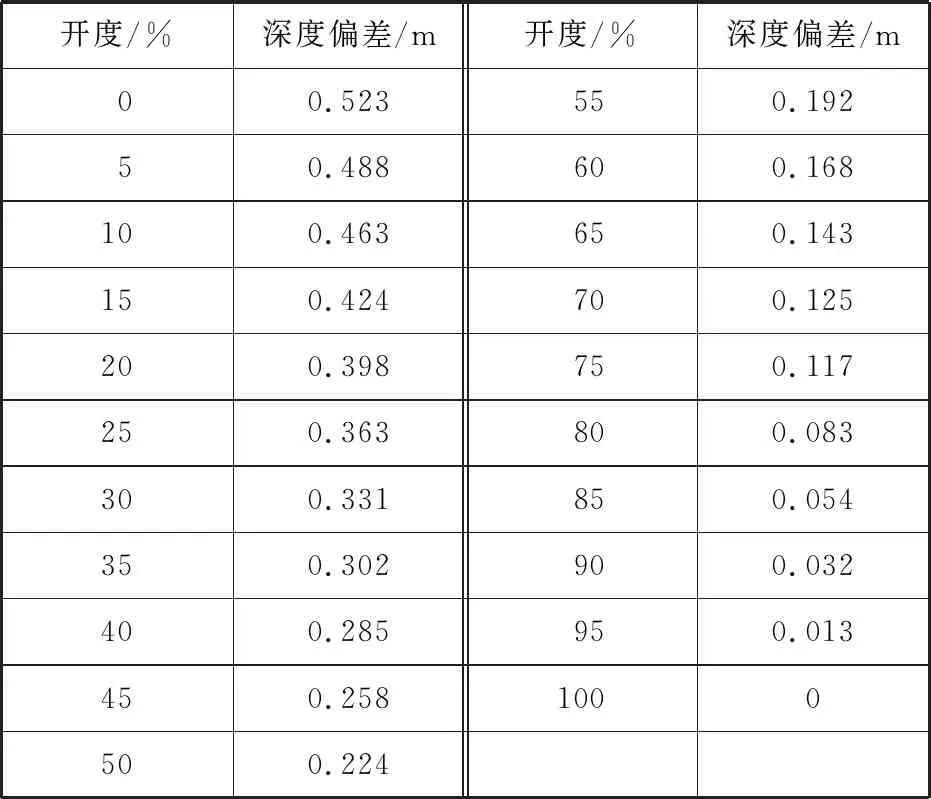
表1 不同开度下抓斗齿的深度表
从表1可以看出,抓斗开度对抓斗的深度影响较大,最大偏差深度达到0.523 m,无法满足基槽精确挖掘要求。为此,系统引入了挖掘平整度模型,其挖掘平整度数据见表2。不使用模型时,平整度偏差为0.823 m;使用平整度模型后,偏差缩小至0.190 m。由此可见,挖掘平整度模型大大提升了抓斗位置的水平精度、深度精度。
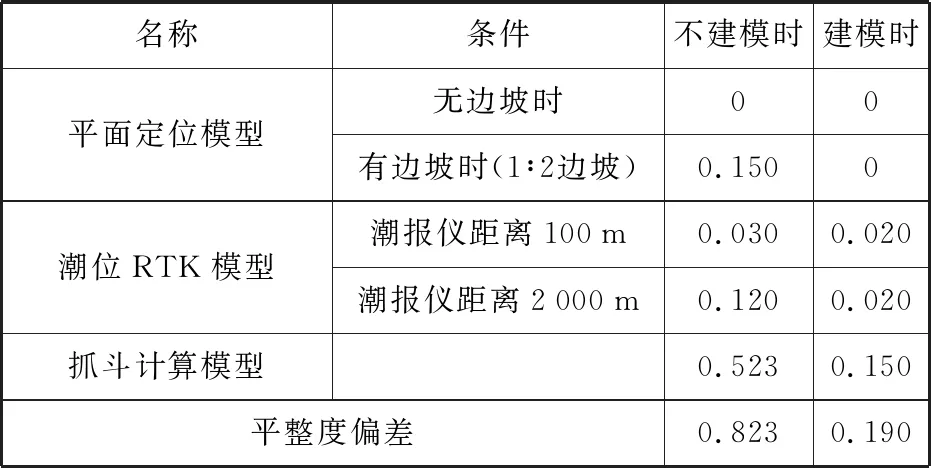
表2 模型平整度分析结果 单位:m
4 结论
(1)采用平面定位模型的计算与分析,提高了抓斗定位水平位置精度。
(2)潮位RTK模型大大提高了潮位更新的及时性,根本解决了潮位对抓斗深度的影响。
(3)抓斗计算模型的使用,从抓斗点的挖掘变为面的挖掘。
猜你喜欢
农业装备与车辆工程(2022年1期)2022-10-31
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
建材发展导向(2022年1期)2022-03-08
建材发展导向(2022年2期)2022-03-08
应用能源技术(2022年1期)2022-02-26
科学与财富(2021年33期)2021-05-10
戏剧之家(2018年21期)2018-10-19
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
城市建设理论研究(2012年6期)2012-04-10
