横浪海况下“蓝鲸”号起重船吊装上部组块运动响应研究
2021-01-29 10:00骆寒冰刘福升
船舶力学 2021年1期
骆寒冰,刘福升,罗 晓,谢 芃
(天津大学a.水利工程仿真与安全国家重点实验室;b.船舶与海洋工程系,天津300072)
0 引 言
海上石油导管架平台的上部组块可以采用起重船吊装方式安装。作业时,为了减少上部组块的运动响应,起重船通常以顶浪方式系泊就位。有时候,由于导管架布置原因,起重船只能横浪吊装作业;或者作业时海况比较复杂,主浪向有两个方向,出现了横浪工况。横浪工况作业时,起重船和吊装组块的运动容易偏大,导致上部组块安装就位到导管架上面有困难,威胁施工作业的安全,甚至造成结构设备损坏和人员伤亡事故。Noble Denton[1]指导性手册中给出了吊装组块的运动衡准:组块垂向运动不超过±0.75 m,水平运动不超过±1.5 m。在组块吊装施工前,根据现场海上气象预报资料,如果能够提前对吊装施工时组块的运动响应情况进行准确预报,能判断安全作业,那么就制定相关施工方案,以避免意外事故的发生。因此,开展系泊起重船吊装组块运动响应的研究具有重要的理论意义和工程应用价值。
系泊起重船吊装组块运动响应的研究,涉及波浪-系泊系统-起重船-吊缆-吊物(上部组块)的复杂耦合系统,国内外开展数值模拟和模型试验研究很少,其响应机理以及规律特性还有待深入研究探讨。许鑫[2]等以一艘概念半潜式起重船为研究对象,用数值模拟和模型试验的方法研究其空勾和最大起重时在波浪作用下的运动性能。骆寒冰等[3]对顶浪工况下“蓝鲸”号起重船吊装3 000 t组块的耦合运动,采用MOSES软件进行了数值模拟,后来,骆寒冰等[4]采用双峰谱模拟涌浪,水池模型试验研究了顶浪下吊装运动响应。Li 等[5]在SIMO 程序中开发了一个外部动态链接库,对风机基础吊装下放到水中的整个过程进行了时域数值模拟,考虑了船舶屏蔽效应的影响,并对波浪周期、波高参数进行了敏感性分析。
针对“蓝鲸”号起重船,作者开展了横浪下吊装上部组块的耦合运动响应研究工作。“蓝鲸”号起重船隶属海洋石油工程股份有限公司,2015年前是我国单臂起重能力最大的起重船,其最大起吊能力尾吊为7 500 t,全回转为4 000 t。本文首先研究横浪-系泊系统-起重船-吊缆-组块复杂耦合系统的数值模拟方法;其次,在规则波中,预报组块运动响应规律和特性,并通过数值模拟和模型试验对比,研究其耦合运动响应机理;最后,预报典型横浪不规则波工况下的运动响应,对比Noble Denton 相关衡准,研究允许施工作业的工况。
1 起重船吊装组块耦合系统模型
“蓝鲸”号起重船一般采用艏吊方式吊装作业,本文所提的耦合系统是指横浪-系泊系统-“蓝鲸”号起重船-吊缆-吊物(上部组块)。本章主要介绍耦合系统模型情况,给出系泊系统、起重船和吊物的主要参数,具体见表1。其中船舶的排水量、重心位置都考虑了上部组块的重量影响。起重船的系泊系统采用30°和60°的对称系泊方式,系泊系统布置情况如图1 所示。图2 为“蓝鲸”号起重船的模型表面网格划分情况。施工作业海域水深设为80 m。
在天津大学港口与海洋工程试验水池进行运动响应模型试验,水池的长、宽、深尺寸为55 m ×40 m × 1.8 m,造波区域宽度24 m。模型缩尺比选择1∶60,试验水深1.33 m,模拟80 m 的水深。水池一侧是推板式造波机,可造出规则波和不规则波,另一侧是消波装置。船舶模型采用玻璃钢材质加工制作,上部组块采用PVC 板焊接制作。船模和组块的重量、重心、惯量都经过调整满足相似关系。模型吊机系统的吊杆可以改变角度,吊缆长度可以调整,用来调整吊物的高度。系泊线采用钢缆和弹簧组合制作。测试了船舶和组块的六个自由度运动、波浪波高、锚缆系泊力等参数,采样频率取50 Hz。运动响应测试采用加拿大NDI Optotrak Certus 三维动态测量系统,最高精度可达0.1 mm,分辨率为0.01 mm(在2.25 m 时)。系泊拉力采用威思特公司的VS16 微小型拉力传感器,量程为2 kg,精度为2 g。模型试验布置情况如图3所示。
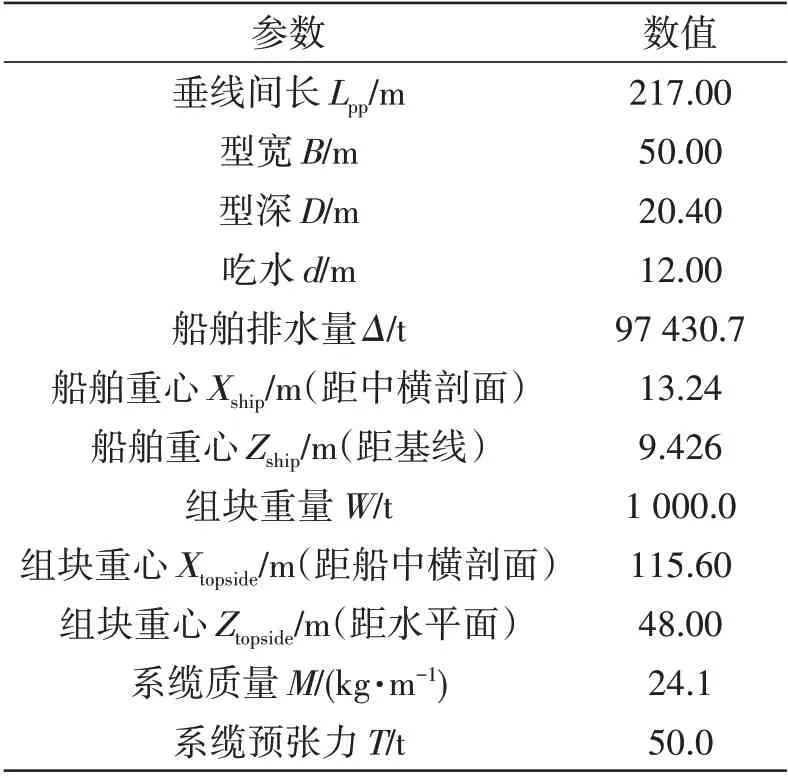
表1“蓝鲸”号起重船耦合系统主要参数Tab.1 Main particulars of the coupling system
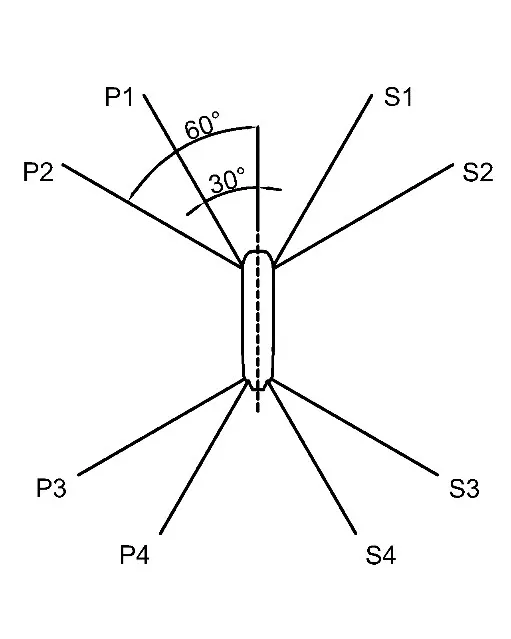
图1“蓝鲸”号起重船系泊布置图Fig.1 Mooring layout of the vessel“Lanjing”
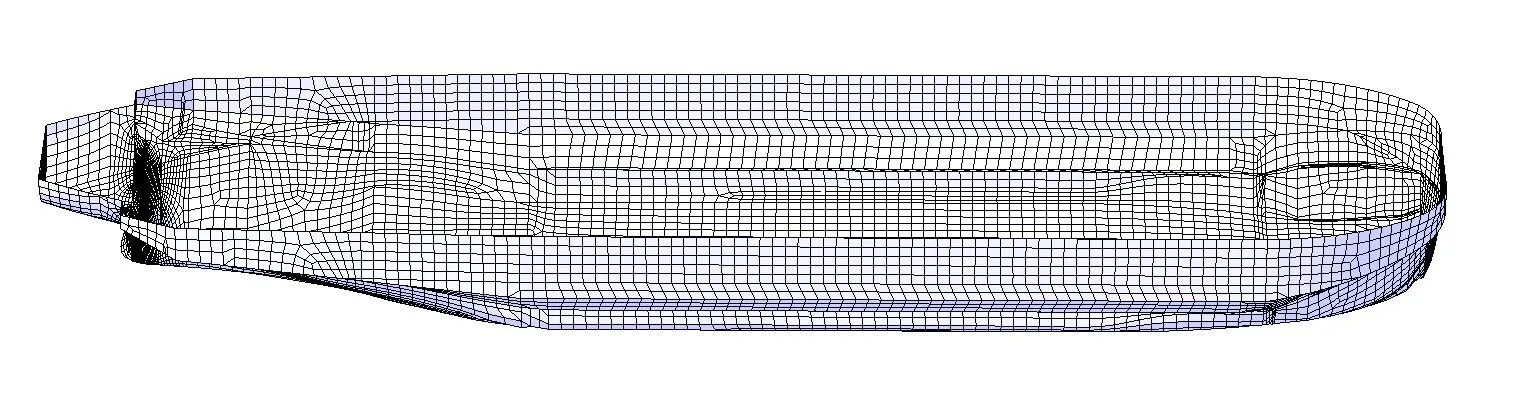
图2“蓝鲸”号起重船网格划分情况Fig.2 Model meshes of the vessel“Lanjing”

图3 横浪中水池模型实验布置情况Fig.3 Vessel model in the water basin in beam waves
2 耦合系统运动响应数值模拟方法
2.1 系泊系统运动响应分析方法
式(1)给出了系泊船舶的运动响应方程,

式中,Mij为广义船体质量矩阵,Aij为附加质量系数矩阵,Bij为阻尼系数矩阵,Cij为恢复力系数矩阵,Fwj为波浪力,分为一阶、二阶波浪力,基于势流理论推导,Fmk为系泊缆力,采取准静态法分析。
2.2 二阶波浪力计算方法
对于系泊船舶而言,所受到的波浪力不仅是波频下的一阶波浪力,还有二阶波浪力,包括定常的漂移力(也称平均波浪力)和低频的缓变漂移力(也称慢漂力)。二阶力计算方法包括二阶传递函数(QTF)方法和Newman 近似法[5]。本文对系泊“蓝鲸”号起重船进行数值模拟时使用Newman 方法。Newman算法的近似表达式如下:

2.3 阻尼系数计算方法
为提高数值模拟结果的合理性和精确性,根据模型试验的结果对船舶和吊物的阻尼系数进行了修正,方法如下:

式(4)中,2μi是第i 个自由度的无因次阻尼系数;Δφ 是衰减曲线中相邻峰值点的差值;φim是衰减曲线中相邻峰值点的均值;通过进行静水各个自由度的自由衰减运动模型试验,可以分析得到上述无因次阻尼系数2μi。
式(5)中,2Nj是有因次阻尼系数;Mj和ΔMj为船舶的质量和附加质量,可从HydroD 程序中计算得到;Tj是船舶运动周期,最终得到船舶的阻尼系数。
吊物运动的阻尼系数修正计算方法与上述船舶的方法类似。
3 静水中耦合系统特性分析
对单根缆绳和整体系泊系统在静水中的刚度特性进行研究。图4 为单根缆的特性曲线,横坐标为单根缆绳一端的水平偏移量(HDX),纵坐标为缆绳提供的拉力。图5 为系泊系统的整体刚度位移曲线,横坐标为船舶纵向运动距离(DX),纵坐标为船舶所受水平力。图中,标识“SIMO”表示采用SI⁃MO 程序[7]分析结果,“EXP.”表示试验结果,所有数值都已经转化为实船尺度。对比表明模型试验与数值模拟刚度特性结果吻合很好。

图4 单根缆绳刚度位移曲线Fig.4 Horizontal force and distance of the mooring line
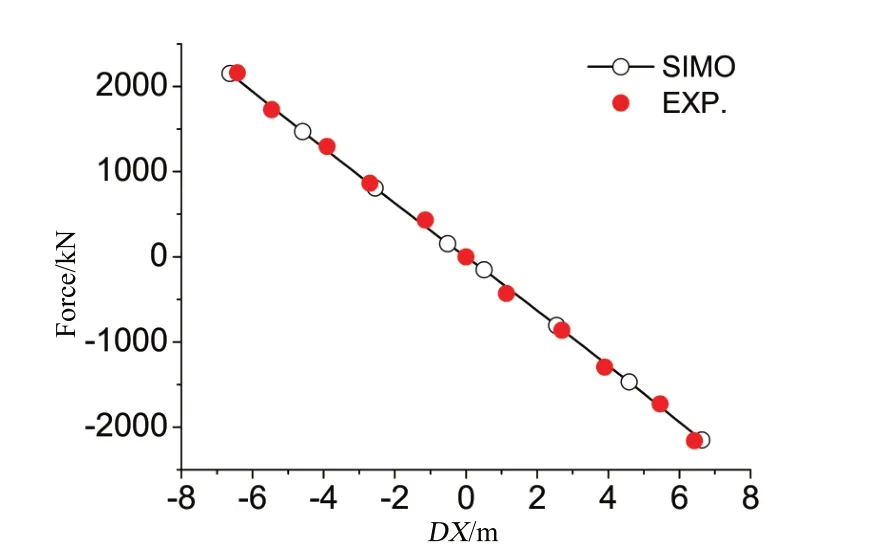
图5 系泊系统总体刚度位移曲线Fig.5 Stiffness curves of the mooring system
在静水中对系泊起重船进行了各个自由度的运动衰减实验,测量固有周期及其阻尼特性。同样,还对起重船约束不动情况下吊物横荡及纵荡做了运动衰减实验。表2 列出了模型实验系泊起重船和吊物的固有周期与数值分析结果的对比,两者吻合较好。根据第2.3节阻尼计算方法,用水池模型实验得到的阻尼对数值模拟模型的阻尼进行了修正。通过上述分析,数值模拟模型和水池实验模型的系泊刚度、船舶固有周期、阻尼特性保持一致,为后续波浪中耦合运动响应研究打下基础。
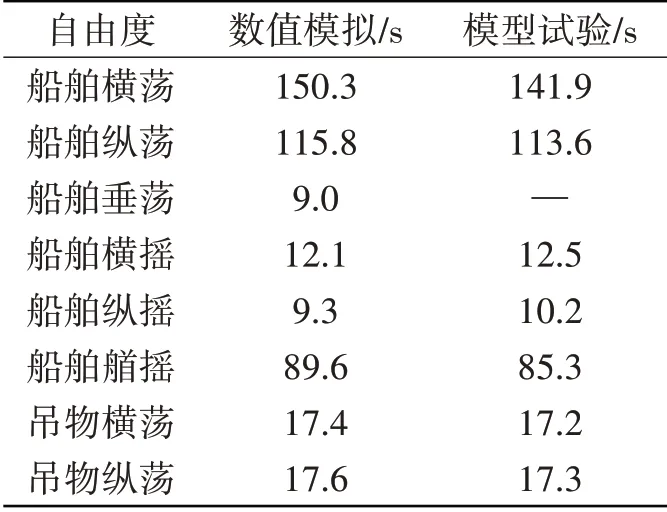
表2 系泊起重船和吊物的固有周期对比Tab.2 Comparison of the natural periods of the vessel and the topside
4 规则波中耦合系统运动结果对比分析
为了研究横浪-系泊系统-“蓝鲸”号起重船-吊缆-吊物(上部组块)耦合系统的运动特性,首先开展规则波下运动响应分析,波浪周期为5.0~22.0 s。由于浪向为横浪,只分析了起重船的横荡、垂荡和横摇运动,以及上部组块的横荡和垂荡的运动情况。对数值模拟运动响应结果进行了滤波处理,分别得到低频二阶运动和波频运动成分,与模型试验结果进行了对比,见图6~10。对结果进行了无量纲化处理,方法如下:

式中,ω为波浪圆频率,Y、Z、φ分别为横荡、升沉和横摇运动,L为船长,k为波数,ζ为波高。可以看出:
(1)数值模拟起重船和吊物的原始运动结果、高频和低频运动结果,与试验结果吻合较好。起重船和吊物的横荡运动存在明显的低频二阶运动成分,而起重船垂荡、横摇以及吊物垂荡的低频二阶运动成分较小,主要是波频运动成分;
(2)起重船的横摇运动RAO存在两个峰值,圆频率ω'分别是1.631和2.447,对应的周期分别为18.0 s和12.0 s,分别接近吊物的固有周期和船舶的横摇固有周期。表明当波浪周期与船舶横摇周期接近时,会引起船舶横摇共振;波浪周期与吊物固有周期接近时,由于吊物横荡共振,也会引起船舶横摇运动增加,出现共振现象;
(3)吊物的横荡运动RAO存在两个峰值,分别为18.0 s和12.0 s,与起重船横摇运动RAO共振周期特性相同。波浪周期与吊物固有周期接近时,会引起吊物横荡共振;当波浪周期与船舶横摇周期接近时,由于船舶横摇共振,也会引起吊物横荡出现共振;
(4)数值模拟和模型试验结果吻合较好,都揭示了在吊装时起重船和吊物的耦合运动机理。在横浪工况下,波浪周期接近船舶横摇固有周期或者吊物横荡固有周期时,由于船舶与吊物之间互相耦合作用,船舶横摇和吊物横荡运动都会出现共振现象。因此在施工过程中要实时观测现场的环境,施工时波浪周期尽量避开船舶及吊物的固有周期。

图6 系泊起重船横荡运动对比Fig.6 Comparison of sway motions of the vessel“Lanjing”
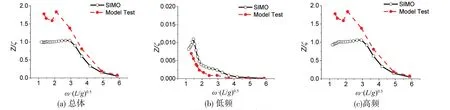
图7 系泊起重船垂荡运动对比Fig.7 Comparison of heave motions of the vessel“Lanjing”
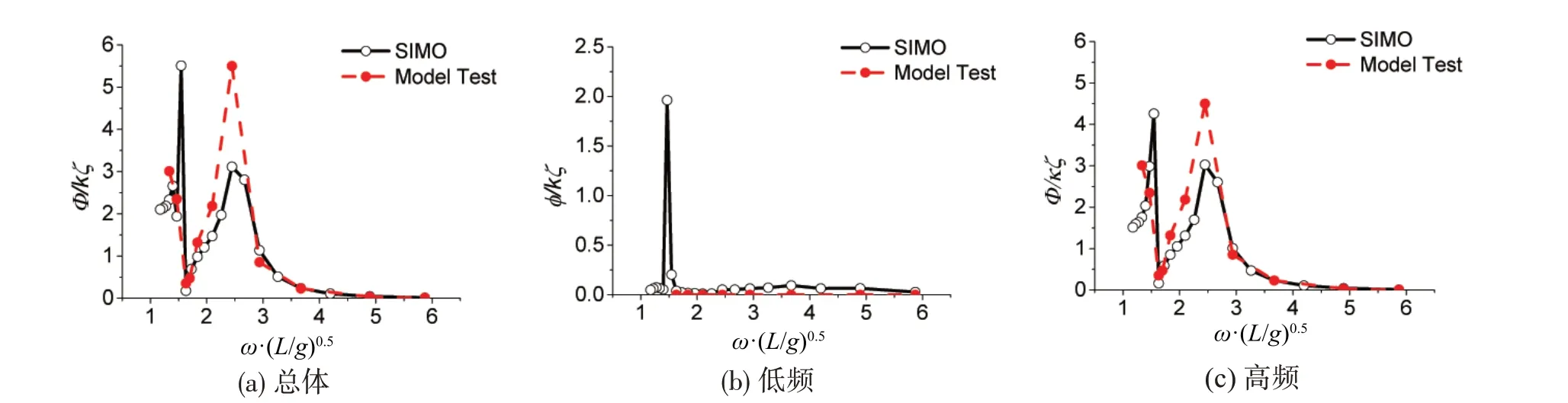
图8 系泊起重船横摇运动对比Fig.8 Comparison of roll motions of the vessel“Lanjing”

图9 吊物横荡运动对比Fig.9 Comparison of sway motions of the topside

图10 吊物垂荡运动对比Fig.10 Comparison of heave motions of the topside
5 不规则波中耦合系统运动响应数值预报
上述数值模拟方法预报结果与模型试验吻合较好,可以合理预报规则波中耦合系统运动规律,精度在可接受范围内。本章将选取典型不规则波工况,利用该方法开展横浪-系泊系统-“蓝鲸”号起重船-吊缆-吊物(上部组块)耦合系统的运动响应预测。根据施工海域波浪特性,不规则波的有义波高选取为0.75 m 和1.0 m,谱峰周期选取为8.6 s 和11.6 s,共四组工况。不规则波采用Jonswap 谱[6],公式如下:

图11显示的是波高为0.75 m,谱峰周期为8.6 s工况下的数值模拟时域曲线及其能量谱。图12显示了船舶横荡、船舶横摇以及吊物横荡的时域曲线及其能量谱分析的结果。数值模拟时间为2 h,为了清楚地显示,仅给出了1 000 s的时域结果。
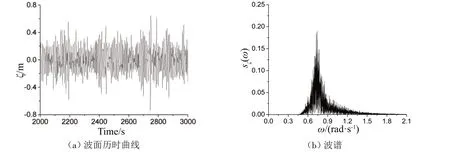
图11 工况1横浪不规则波Fig.11 Irregular waves in beam seas


图12 不规则波下起重船和上部组块运动情况Fig.12 Motion responses of the vessel“Lanjing”and the topside in irregular waves
分析图11和图12,可以看出:
(1)起重船和吊物的横荡运动同时包含了低频二阶运动和波频运动两部分,其中低频部分能量主要集中在0.01~0.07 rad/s 的频率范围,这是由不规则波中的系泊起重船二阶慢漂运动所引起的,低频部分相对波频部分对合成运动影响较大;
(2)起重船和吊物的垂荡运动基本集中在0.45~0.9 rad/s的频率范围,起重船的横摇运动主要集中在0.45~0.8 rad/s的频率范围,这些主要是由于不规则波引起的波频运动响应;
(3)起重船横摇运动和吊物横荡波频运动的谱能量分布类似,谱峰频率都在0.55 rad/s 附近,表明吊物横荡的波频运动与起重船横摇运动这两部分之间存在明显的耦合响应关系;
(4)起重船和吊物垂荡运动的谱能量分布类似,谱峰频率都在0.7 rad/s附近,表明这两个垂荡运动之间存在耦合响应关系。
表3为四种波浪工况情况下数值模拟吊物运动的统计结果,包括有义值(即三一值,最大1/3平均值)、百一值(最大1/100平均值)。
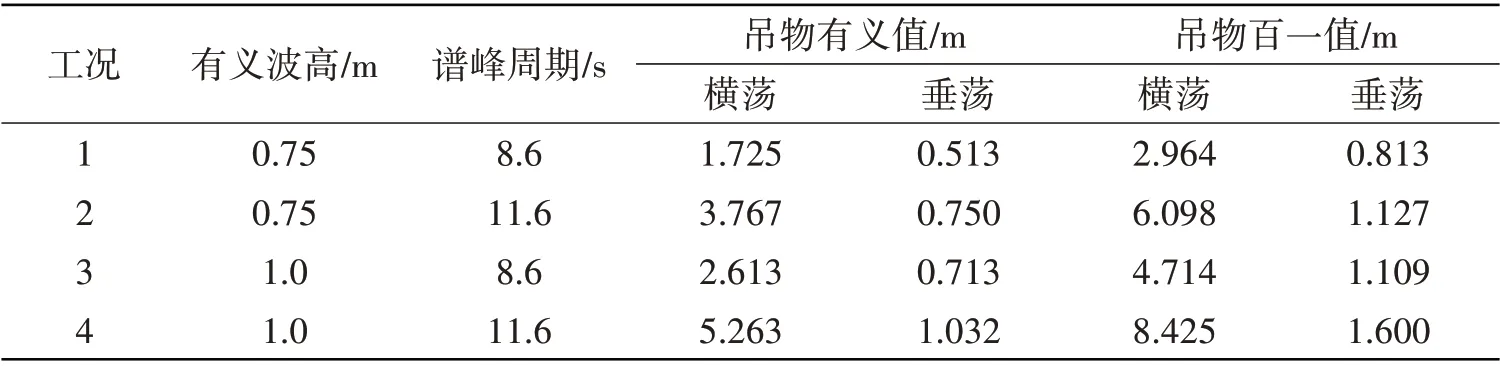
表3 横浪不规则波中运动响应统计结果Tab.3 Statistical results of motions responses in irregular waves in beam seas
设百一值为最大值,根据Nobel Denton 指导性手册中所推荐组块吊装安全施工的衡准要求,水平运动不超过±1.5 m,垂向运动不超过±0.75 m时可进行作业,可以看出:
(1)第一组工况的吊物运动满足安全施工要求,即在谱峰周期为8.6 s 时,有义波高为0.75 m 时也可以进行施工作业;
(2)第二、三、四组工况的吊物运动不满足安全施工要求,主要是横荡运动较大,超过了推荐衡准值,当谱峰周期增大到11.6 s时候,接近起重船的横摇固有周期,引起吊物横荡运动响应较大;当有义波高增大到1.0 m时,由于波高较高,导致吊物的横荡运动响应较大,该海况下不建议施工。
6 结 语
作者针对横浪-系泊系统-“蓝鲸”号起重船-吊缆-吊物(上部组块)复杂耦合系统开展了运动响应研究工作;对比了规则波中数值模拟结果与水池模型试验结果,结果吻合较好;验证了数值模拟的准确性;然后,对典型不规则波工况中的耦合运动进行了预报分析。
本研究揭示了起重船吊装时的耦合运动机理,重点研究了上部组块的横荡运动响应规律。在横浪工况下,吊物横荡运动响应主要包括低频和波频两部分,吊物的低频部分主要与系泊起重船的横荡低频二阶运动响应相关,波频部分主要与起重船横摇运动相关。当波浪周期接近船舶的横摇固有周期或者吊物的横荡固有周期时,由于船舶与吊物之间互相耦合作用,船舶横摇和吊物横荡运动都会出现共振现象。
利用本文推荐的数值模拟方法,选择典型不规则波海况,对横浪系泊“蓝鲸”号起重船吊装上部组块运动预报结果表明:当谱峰周期为8.6 s、有义波高为0.75 m 时,吊物运动满足Nobel Denton 衡准要求,可以进行吊装施工作业;当谱峰周期增大,接近船舶横摇固有周期或者接近吊装组块固有周期时,会导致共振现象的发生,或当波高增大到1.0 m时,都会使得吊物横荡运动响应较大,不建议施工。因此,在现场海域施工时,应实时关注海况,包括波高和周期,尽量避免在波高较高时或者在波浪周期接近船舶横摇固有周期或者吊装组块固有周期时作业。本文研究成果可以为海上现场吊装施工提供技术参考,以提高作业效率和安全性。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
小哥白尼(野生动物)(2022年2期)2022-06-01
中国石化(2021年8期)2021-11-05
水上消防(2020年2期)2020-07-24
中学课程辅导·教师通讯(2020年22期)2020-02-04
中文信息学报(2019年12期)2019-12-30
海洋工程装备与技术(2017年5期)2017-03-05
中国海上油气(2016年1期)2016-06-09
电子设计工程(2014年17期)2014-02-27
长春大学学报(2013年4期)2013-08-15