
要地防护反无人机系统设计与实现
2021-02-03 02:45王诗年孙家平
测控技术 2021年1期
王诗年, 孙家平, 郭 琰
(南京电子技术研究所,江苏 南京 210039)
小型无人机已在各行各业得到广泛应用,同时小型无人机飞行也给低空安全带来巨大挑战。商用及消费级小型无人机,购置成本低廉、易于获取、操控智能简单、使用机动灵活。一般小型无人机飞行高度在500 m以下,经改装后可达4000~6000 m,遥控最远距离可达7000 m;一般装载量为5~7 kg,即使“大疆”精灵无人机也可承载2~3 kg。这些小型无人机极有可能成为犯罪分子的工具,用于越境走私、贩毒等犯罪活动,甚至会被恐怖分子利用,通过搭载各类常规或生化爆炸装置,对通信中心、交通枢纽、大型集会活动以及监狱等重要政治、经济设施实施恐怖袭击[1-10]。
现有的基于无人机飞控软件的区域限制技术、无人机实名购买且ID唯一、无人机飞手考证等手段,有可能在管理层面避免无意的空域干扰。对于恶意无人机空域威胁,必须采用不依赖基于无人机飞控限制技术的方案,防止有人在破解、改装无人机的情况下实施破坏行为。
本文提出一种基于多传感器协同的要地防护反无人机系统,该系统针对小型无人机,集探测、识别、指挥、拦截于一体化,调度雷达、无线电侦测、光电红外等多种探测手段协同工作,汇集处理多源探测信息,实现对小型无人机目标的尽早发现、快速识别、及时告警,分析判断目标威胁情况,并进行干扰及拦截,从而保障城市、要地安全。
1 系统组成
要地防护反无人机系统由智能管控子系统、雷达探测子系统、光电红外跟踪子系统、无线电侦测子系统以及干扰处置子系统组成。
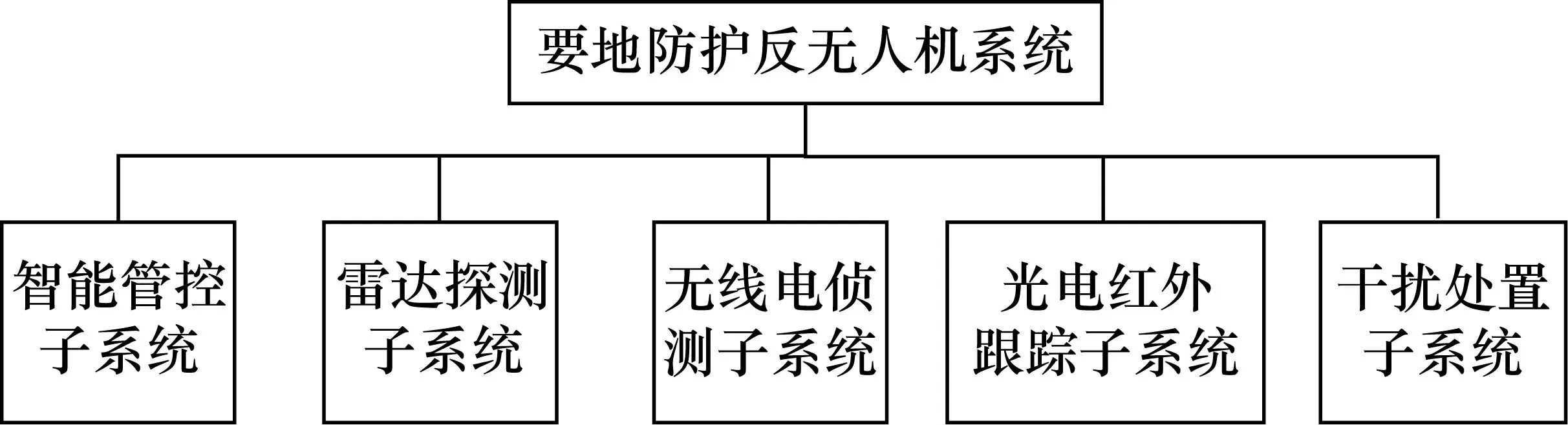
图1 系统组成图
智能管控子系统可实现雷达、光电红外、无线电侦测等传感器探测信息的接入、融合处理,形成综合航迹,基于GIS一体显示空情态势与光电红外视频,并能实时监视各设备工作状态,对异常情况给予告警。
雷达探测子系统采用两维相扫圆阵雷达,能对360°空域内的目标进行搜索,相比机扫雷达,具有较高的数据率,最高可达0.2 s,能对小型无人机持续稳定跟踪,并可为光电红外跟踪识别提供引导信息,为干扰设备实施反制提供引导。
无线电侦测子系统在无人机开机后即可截获遥控信号、图传信号,自动告警测向,并引导雷达对重点区域进行搜索,甚至能对无人机操控者测向。
光电红外跟踪子系统获取的图像分辨率高,易于辨识目标,低空/超低空侦察性能好,观测可靠、直观,探测跟踪精度高,尤其在强电磁干扰和目标进入低角盲区等情况下仍能有效探测、跟踪,具有不受电磁干扰、目标识别能力强等特点。
干扰处置子系统通过释放遥控、图传、GPS定位信号实施压制干扰,根据无人机控制策略,通过释放不同信号的组合,可迫使无人机返航或迫降。
2 总体设计
2.1 体系架构
根据系统应用场景与性能要求,采用客户端/服务器模式架构。系统体系架构主要由硬件平台、基础层、服务层、应用层构成,如图2所示。硬件平台提供信息感知、通信网络、计算存储等设备要素,为系统信息获取、处理、显示提供支撑。数据层基于硬件平台要素,提供航迹数据、地理数据、基础数据这三类数据。其中,航迹数据包括雷达三坐标航迹、光电红外两坐标航迹与视频图像数据、无线电侦测设备单站一维航迹与双站交叉定位两维航迹数据等;地理数据包括矢量地图、影像地图数据及各设备部署位置信息;基础数据包括告警规则、无线电侦测设备的目标频率样本数据、光电红外设备识别目标的图像样本数据等。服务层基于数据层要素,提供信息接入、信息处理、地理图形等服务,为应用提供各类信息和服务支撑。应用层基于应用场景,构建综合显示、指挥控制、协同探测、威胁分析、调查取证等应用。

图2 体系架构
2.2 工作流程
系统工作流程主要由多源异构信息处理与显示和智能管控组成,如图3所示。
多源异构信息处理与显示流程主要包括数据接入、信息处理、态势显示、数据存储与回放等。数据接入软件分别接入无线电侦测子系统单站输出的目标方位信息与双站输出的经纬度信息,光电红外跟踪子系统输出视频信息与目标方位、俯仰信息,雷达探测子系统输出的距离、方位、俯仰三维信息,并对各种航迹数据进行解析,转换为统一格式。多源异构信息处理软件通过时空配准、误差校正等对数据进行归一化处理,对单传感器数据管理形成单站航迹,对异类传感器数据进行关联、融合为综合航迹。态势显示软件可同时同步显示实时态势与视频图像,并可根据图层控制对单站航迹与综合航迹的分层显示。数据记录与回放软件对各类航迹数据与视频图像数据记录并同步回放。

图3 系统工作流程图
智能管控流程主要包括多传感器协同与自动告警。无线电侦测能够尽早发现小型无人机目标方位,系统根据发现方向设置雷达重点搜索区域,进行重点搜索;雷达发现跟踪目标后,系统根据综合航迹控制光电红外的云台方位、俯仰,搜索跟踪目标;光电红外锁定目标后,系统根据目标距离自动或半自动引导无线电干扰设备实施干扰。系统基于内置的告警规则,依据目标距离、速度大小、目标属性等信息,综合判断目标威胁情况,进行自动告警。
3 关键技术
要地防护反无人机系统集成的雷达、无线电侦测、光电红外等传感器应用场景、作用距离、定位精度均不同。无线电侦测设备优点在于能尽快获取目标方位,双站可实现交叉定位,而且能识别目标载频甚至能识别常用商用无人机的型号,其缺点是定位精度较低,在复杂电磁环境下会有较高虚警。雷达能实现全天候全天时主动探测,定位精度、数据率较高,其缺点是不能判定目标类型。光电红外能通过视频图像直观形象地识别目标,其缺点是需要在雷达引导下搜索跟踪,受天气、气候影响较大。为实现对小型无人机的早期预警、及时连续跟踪、准确识别,需要多传感器协同工作,优势互补,关键在于实现异类传感器的数据融合处理与多传感器协同探测[11]。
3.1 多传感器数据融合处理
多传感器数据融合处理包括同类多传感器的融合与异类传感器的融合,主要流程如图4所示。同类传感器的融合主要是多雷达组网融合,异类传感器的融合主要是雷达与无线电侦测的融合、雷达与光电红外的融合。

图4 异类传感器数据融合处理算法
多雷达组网融合是为了消除多雷达数据间可能存在的冗余和矛盾,提升探测精度,主要步骤包括剔除野值、时空配准、误差校正、融合匹配、信息关联等。采用“基准航迹关联法”,根据各雷达精度,选取某一目标精度最高的雷达航迹作为基准航迹,将后续航迹与基准航迹进行关联判断[12]。
异类传感器的融合主要在于取长补短、综合印证、优势互补,属性补全,扩展监视空间,提高目标威胁分析能力,增强信息可信任度。异类传感器的融合的具体规则为:① 雷达未掌握、无线电侦测掌握时,采用无线电侦测航迹;② 雷达掌握、无线电侦测设备未掌握时,采用雷达航迹;③ 雷达与无线电侦测同时发现目标时,优先利用雷达航迹,同时采用无线电侦测识别的型号与载频;④ 雷达与光电红外同时跟踪时,将雷达的距离与光电红外的方位、俯仰进行解算融合。
一次试验中,雷达与光电红外融合前,综合航迹的三维距离偏差平均值为39.7 m;雷达与光电红外融合后,综合航迹的三维距离偏差平均值为11.53 m,显著提高了定位精度,如图5所示。
3.2 多传感器协同探测
多传感器协同探测主要包括无线电侦测与雷达协同、雷达与光电红外协同。无线电侦测远距离对目标进行侦测,发现目标后,引导雷达设置搜索扇区,进行重点搜索,如果无线电侦测未发现目标,则雷达全空域搜索;雷达发现目标后,保持对目标的稳定跟踪,引导光电红外控制云台方位、俯仰进行搜索跟踪;光电红外锁定目标后持续稳定跟踪,系统根据威胁情况引导无线电干扰设备实施干扰,流程如图6所示,系统软件界面如图7和图8所示。

图5 多传感器融合处理前后三维距离比较

图6 异类传感器协同探测流程

图7 系统软件界面主屏

图8 系统软件界面辅屏
通过无线电侦测与雷达的协同,雷达在无线电侦测方位信息的引导下,对重点区域进行搜索,可减少雷达搜索时间,提高发现概率,并且降低鸟类等其他“低慢小”目标造成的虚警;雷达与光电红外的协同,能提升目标定位精度和综合航迹数据率。
雷达与光电红外协同的难点在于雷达的精度与光电红外的视场角之间的矛盾引起雷达光电红外协同失效。所采用的雷达测量精度为:方位≤1°,仰角≤2°(7°以上),光电红外的视场角方位为1°,俯仰为0.8°,雷达方位精度值与光电红外方位视场角相当,在方位上能引导成功;雷达的俯仰角精度值大于光电红外俯仰视场角,在俯仰上难以引导成功。采用“光电红外俯仰扇扫”,即以雷达探测俯仰角度为基准,以光电红外俯仰视场角的一半0.4°为步长,以雷达俯仰精度值为范围,即[-2°,2°]的区间,进行俯仰扇扫,扫描一个完成的周期需要10个步长,光电红外伺服机构转动一个步长进行一次识别耗时1.2 s,因此一次完整的扇扫时间为12 s,示意图如图9所示。经过多次试验验证,在光电红外观测范围内,从启动协同引导指令开始到光电红外锁定目标耗时为12 s左右,与理论计算时间一致。
4 结束语
本文综合利用雷达、光电红外、无线电干扰设备,提出了一种小型无人机探测、识别与反制的方法和流程,提出了多传感器融合方法和规则以及雷达与光电红外协同探测方法,经过多次试验验证了该方法和流程的合理性与有效性。针对多传感器数据融合策略还有待进一步研究,从而提升融合算法健壮性与冗余性。

图9 光电红外扇扫示意图
该系统中采用了异类传感器数据融合处理、多传感器协同探测技术,实现了多传感器接力探测与目标的连续稳定跟踪,为实施干扰提供了可靠引导,操作简单,实战性强。该系统已在2017年国家公祭日重大安保、某核电站低空防御中得到实战应用,并在国内多次反无人机比赛中获得优异成绩。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
幼儿园(2021年12期)2021-11-06
铁道通信信号(2020年3期)2020-09-21
青年歌声(2019年12期)2019-12-17
铁道通信信号(2018年8期)2018-11-10
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
