多无人机辅助的物联网信息与能量同传优化策略
2021-02-04 06:53李晓晓
软件导刊 2021年1期
凌 莉,李晓晓,赵 宁
(1.武汉工程职业技术学院 信息工程学院,湖北 武汉 431400;2.北京五八信息技术有限公司,北京 100015;3.武汉理工大学 计算机科学与技术学院,湖北 武汉 430070)
0 引言
物联网一般通过电池供电且由能量受限的智能设备组成,难以长时间满足高质量的流量需求,因此绿色高效的无线传输优化策略的重要性日益凸显[1-2]。无人机(Un⁃manned Aerial Vehicle,UAV)空基通信平台的出现在一定程度上提高了无线传输效率。这主要是因为UAV 可以和IoT 设备建立高效的视距通信链路,从而降低信号传播过程中的路径损耗,以提高能量转移与信息传输效率[3-4]。因此,UAV 辅助的物联网系统无线信息与能量同传(Simul⁃taneous Wireless Information and Power Transfer,SWIPT)在物联网系统中得到了极大发展[5-6]。为了在满足IoT 设备信息接收速率的同时确保每个设备采集能量的公平性,需最大化所有设备最小采集能量。
1 相关工作
近年来众多学者对以UAV 作为空中能量发射器/基站进行的能量转移和信息传输展开了研究。Xu 等[7-8]对单无人机向多个地面节点转移能量的优化策略进行研究,给定充电时间和UAV 最大飞行速度限制,优化UAV 飞行轨迹以最大化所有能量采集节点存储的能量。Mozaffair 等[9]对单无人机向地面节点传输无线信息的优化策略进行研究;Li 等[10]和Zhou 等[11]研究了单无人机向多个信息接收器发送信息的情形,主要通过最大化最小传输速率确保地面终端接收信息的公平性。
除了对无人机辅助专用无线信息或能量传输优化策略进行研究,还有学者关注SWIPT 场景中的无线传输优化策略。Xie 等[12]研究了UAV 先通过能量转移的下行链路向地面设备传输无线能量、再利用地面设备以上行链路向UAV 传输无线信息的情形;Yin 等[13]设计了一个无人机辅助的无线信息与能量同传的协作通信系统,其中无人机作为移动中继,并以时分机制执行SWIPT 任务。通过优化无人机中继发送信息功率、轨迹以及时分切换机制,最大化端到端吞吐量;Ku 等[14]研究了无人机向地面能量接收器(Energy Receivers,ERs)广播无线能量的SWIPT 系统,并提出基于强化学习的无人机轨迹优化算法,确保ERs 能够公平地采集能量;Huang 等[15]研究了单无人机辅助的能分SWIPT 物联网系统,在该系统中,接收信号被具有固定功率比的功率分割器分割成两个信号流,其中一个用于传送能量,另一个用于传送信息。在确保物联网设备信息传输速率的情形下,通过优化无人机轨迹,最大化物联网设备在能量采集阶段的最小能量;Sun 等[16]研究了UAVSWIPT 网络中下行链路安全性、可靠性和能量覆盖率问题,利用随机几何方法推导了在非正交多址与正交多址方案下具有高速率安全需求的用户链路中断概率与有效吞吐量表达式,并采用改进的自适应遗传模拟退火算法求解用户可靠性和能量覆盖率之间的最优折衷点。
在UAV 辅助的物联网系统SWIPT 场景中,现有研究仅考虑单无人机辅助且无人机部署在固定高度的情形,缺乏针对多无人机联合部署的研究。因此本文设计一个多无人机辅助的物联网SWIPT 系统,并提出一个联合优化设备关联关系、无人机位置、无人机发射功率和设备功率分割比的多变量固定交替迭代优化算法,在确保无线数据接收速率的同时,最大化设备最小采集能量。
2 模型设计与问题定义
2.1 系统模型
如图1 所示,考虑一个多无人机辅助的物联网系统,其中UAV 向地面IoT 设备发射信号,同时进行信息传输和能量转移。该系统部署M 个UAV 和L 个IoT 设备,分别用集合ℳ={1,…,M}和ℒ={1,…,L}表示。无人机m 的盘旋位置表示为Um=(xum,yum,hm),IoT 设备l 的位置表示为Dl=(xl,yl,0)。如果设备l 由无人机m 提供服务,则称设备l 与无人机m 相关联,且一个设备只能由一个无人机服务,但是一个无人机可以同时为多个设备提供服务,并用bml表示关联关系,即有:
在图1 所示的系统中,所有设备之间通过正交频分多址技术平分系统带宽B,即每个设备可用的通信带宽为B/L,彼此之间不会产生干扰。为了确保设备能够同时进行信息解码和能量存储,本文中所有IoT 设备均配备一个功率分配器,将接收到的功率按功率分割比ρ分为两部分,用于信息解码和能量采集,如图2 所示。

Fig.1 System model图1 系统模型

Fig.2 Power splitter图2 功率分割器
此外,为了满足设备的QoS 需求,每个设备数据接收速率应当大于最小阈值γth,无人机在执行无线信息与能量同传任务中可用的最大发射功率为Pth。
2.2 空地路径损耗模型
目前大多数学者在谈及UAV 空对地(Air to Ground,AtG)信号传输时,均采用基于LoS(Line-of-Sight)链路与NLoS(Non-Line-of-Sight)链路的概率统计模型对无线信号路径损耗进行建模。根据文献[17-18],LoS 链路概率为:

其中a、b 是环境参数,一旦确定地理环境可被视为定值,θml是发射器和接收器之间形成的仰角(分别指IoT 设备和UAV),计算公式为:

其中hm表示无人机m 的高度,dml表示IoT 设备l 和无人机m 之间的3D 距离。由于只考虑了LoS 链路和NLoS 链路,故链路为NLoS 链路的概率为:

此外,根据文献[15]、[19],在AtG 信号传输模型中,LoS 链路与NLoS 链路下的信道增益为:

其中g0是距离为1m 时的信道增益,0<ς<1 表示由NLoS 链路引起的额外衰减因子。
综合上述分析,考虑基于链路概率的统计模型,IoT 设备l 和无人机m 之间的无线信号在传播过程中平均信道增益为:

2.3 问题定义
为在满足IoT 设备信息接收速率的同时确保每个设备采集能量的公平性,需要最大化所有设备最小采集能量。根据图2 描述的功率分配器,在已知无人机m 向设备l 发射信号功率pml时,设备l 用于信息解码的功率与采集能量的功率分别为:

其中ρl为设备功率分配比,gml为式(6)计算得到的无人机m 与设备l 之间的信道增益。在已知设备l 的信息解码功率时,设备l 在无线信息与能量同传过程的数据接收速率为:

其中σ2表示额外的噪声功率。在已知设备l 的能量采集功率时,设备l 在能量采集周期T 内采集到的能量为:

其中ηl表示设备l 的能量转换效率。本文所有IoT 设备能量转换效率相同,即ηl=η,∀l∈ℒ,后续分析仅用η表示所有设备能量转换效率。
经过上述分析可以计算得到设备接收信息的速率和采集到的能量,通过优化无人机-设备关联关系、无人机位置和发射功率及每个设备功率分割比最大化所有节点最小采集能量。该优化问题的数学表达如下:

服从于以下约束:
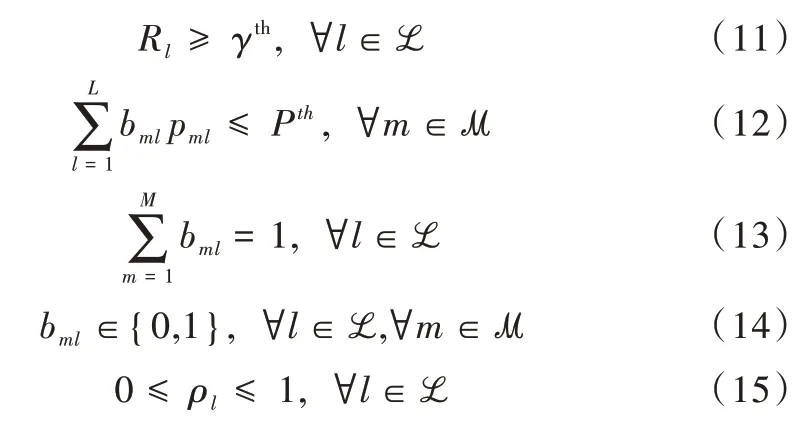
约束(11)确保每个设备接收数据速率大于等于最小阈值;式(12)确保无人机的发射功率不超过最大功率约束;式(13)和(14)表明一个设备仅且只能由一个无人机服务,即对无人机-设备关联关系进行约束;式(15)表示每个设备的功率分割比约束。由式(9)和(10)可知,设备采集的能量由无人机位置、设备关联关系、无人机发射功率以及设备功率分割比决定。并且设备关联关系与无人机位置高度相关,无人机向每个设备传输信号的发射功率与设备功率分割比密切相关,且约束(11)是非凸非线性约束。因此问题(10)是一个复杂的多变量高耦合非凸优化问题,难以直接求解。
3 多变量固定交替迭代优化算法设计
根据非凸非线性多目标优化问题常用的求解方法,本文基于分解的思想,将问题(10)分解为两个子问题交替迭代求解,具体的算法思路如下:
步骤1:将给定无人机发射功率和设备功率分割比作为子问题1 的输入,通过优化无人机位置和设备关联关系最大化设备最小采集能量;
步骤2:将步骤1 得到的无人机位置以及设备关联关系作为当前子问题的输入,通过优化无人机发射功率和设备功率分割比最大化所有设备最小采集能量;
步骤3:利用步骤2 得到的最优方案更新步骤1 的输入,重复前两个步骤。直至系统最小采集能量的变化值小于给定的阈值,停止迭代。
3.1 设备关联关系与无人机位置优化算法
给定无人机发射功率和设备功率分割比,问题(10)的优化变量为无人机位置和设备关联关系,其中可以根据无人机的位置确定设备关联关系,而无人机的最佳位置取决于与之关联的设备的位置。子问题1 可以表述为:

其中φl=η(1-ρl)pml,,在给定无人机m 向设备l 传送信号的发射功率pml和设备l 的功率分割比ρl的情形下,φl和ϖl为常量定值;而E 是为了方便求解引入的变量,表示所有设备最小采集能量。即有:

问题P1 的求解过程分两步。
(1)无人机-设备关联关系。给定M 个无人机的位置,分析问题P1,从第一个约束和第二个约束中可以看出,无人机与设备之间的链路增益越大,每个设备采集的能量和接收信息的速率就越大。因此,可以根据设备接收信号的强度确定无人机和设备之间的关联关系,即:

(2)无人机3D 位置优化。由于所有链路通过正交频分多址平分系统带宽,即不存在系统干扰,因此可以将无人机位置优化解耦为M 个互不相关的位置优化问题。根据式(18)可以确定设备关联关系,进而得到每个无人机服务的所有物联网设备,确定关联集。基于关联集中设备的位置,利用最小包围圆算法,确定每个无人机可部署的子区域范围。将每个无人机可部署的区域离散化,得到多个点集,并计算设备的接收数据速率,将不满足约束的解剔除,确定解集GP。在已知无人机-设备关联关系并满足设备数据接收速率的前提下,问题P1 可以表述为:

式(19)是一个NP 问题,可以利用局部搜索求解该问题,但很有可能陷入局部最优,研究表明禁忌搜索可以通过不断扩大搜索域的方式避免局部最优[20]。因此本文提出一个基于禁忌搜索的无人机位置优化算法,详细描述如算法1 所示。
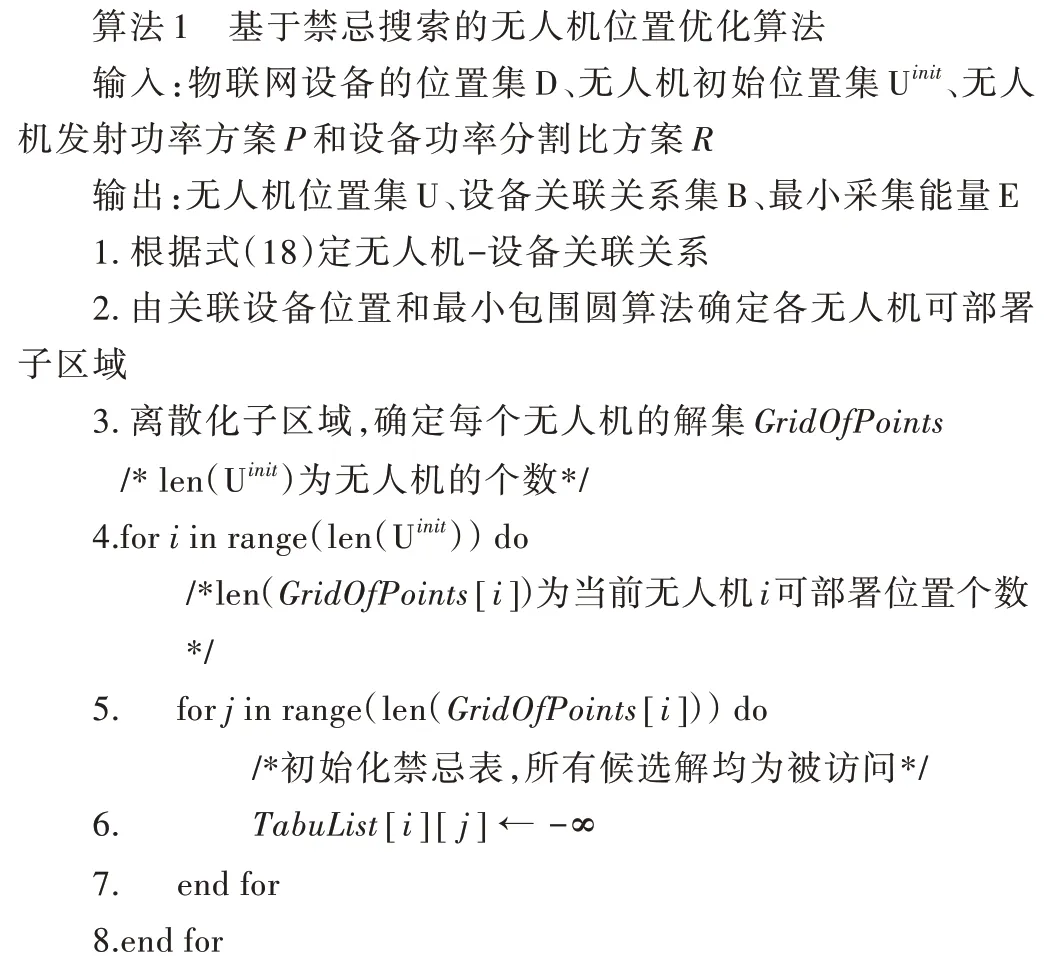

算法1 的1-3 行是根据设备和无人机位置确定关联关系、每个无人机可部署的子区域,并将子区域离散化确定禁忌搜索的可行解方案;第4-8 行是初始化禁忌列表,表明算法初始所有解方案均被考虑在内。而随着后续迭代,会对禁忌表进行更新,为了防止陷入局部最优,禁忌表中的对象在被禁长度max TabuIterations次迭代中不能被搜索;第9-35 行是通过禁忌搜索确定每个无人机最优位置。主要通过邻域构造函数,确定当前解的所有邻域解,即算法的13-16 行;第17-27 行是遍历所有邻域解,首先判断该解是否位于禁忌表中,对每个非禁忌邻域解进行最小采集能量的评估,选择在非禁忌邻域解中最小采集能量最大的一个,即为最佳候选解;第29-31 行是判断最佳候选方案是否比当前最优解好,如果高于最优解,则将最佳候选解更新为下一迭代的全局最优解;第32 行是更新此次的迭代中最优候选集位置处的禁忌指标,满足给定禁忌长度时,解禁该对象。
算法1 时间复杂度分析为:第1 行确定设备关联关系,需要计算信道链路增益,时间复杂度为O(ML);第2 行最小覆盖圆算法的时间复杂度为O(L);第3 行离散化每个子区域并确定可行解的时间复杂度为O(M*NumberofPoints);其中NumberOfPoints为离散点的个数。第4-8 行初始化禁忌表的时间复杂度为O(M*NumberOfPoints)。第9-35 行是对在每个给定区域内通过禁忌搜索得到无人机最优部署位置,单个无人机进行禁忌搜索的时间复杂度为O(MaxIterations∗(n2+n+l)),其中n为问题规模,l为禁忌长度,在此n为NumberofPoints,l为MaxTabuIterations。因此M 个无人机通过禁忌搜索得到最优位置的的时间复杂度为:O(M*MaxIterations∗(NumberofPoints2+NumberofPoints+MaxTabuIterations))。由于该算法时间复杂度主要取决于第9-35 行,因此整个算法时间复杂度近似于M 个无人机进行禁忌搜索的时间复杂度。
3.2 无人机发射功率与设备功率分割比优化算法
给定无人机三维位置与设备关联关系,问题(10)的优化变量为无人机发射功率和设备功率分割比,其中可根据无人机位置与设备关联关系确定无线链路信道增益,因此子问题2 可以表述为:
问题P2 中的第1 个约束和第2 个约束关于优化变量pml和ρl均为非凸约束,为了求解该问题,本部分将上述两个非凸约束近似为凸约束迭代求解。每个设备的采集能量约束近似过程如下:已知(1-x)y=,将等式右边的最后一项由一阶泰勒展开式替代,可得:

不等式(22)右边的表达式分别对x、y求二阶偏导数,值均小于0,因此该表达式是一个关于x、y的凸函数。令分别为第(i)次迭代得到的设备功率分割比和无人机发射功率,可以求得第(i+1)次迭代设备l 可采集到的能量的最小下限值为:

每个设备数据接收速率约束的近似过程如下:
且有函数log2(1+x)关于x单调递增,因此有:
不等式(25)右边的表达式分别对x、y求二阶偏导数,值均小于0,因此该表达式是一个关于x、y的凸函数。令,同样地分别为第(i)次迭代得到的备功率分割比和无人机发射功率,可以求得第(i+1)次迭代设备l接收数据速率的最小下限值为:

因此给出第(i)次迭代得到的设备功率分割比和无人机发射功率,可以通过求解以下优化问题,求出和:

显然,经过上述凸近似逼近转换,问题(27)是一个凸优化问题,利用现有凸优化技术可求得。
综合上述分析,求解问题P2 的算法描述如下:


算法2 的第1 行设置初始迭代以及算法收敛门限,2-5 行是利用内点法迭代求解规约好的凸优化问题(27)。现已知内点法最坏情况下的时间复杂度为,其中n为优化变量的个数,ε为收敛精度。因此算法2 时间复杂度为,其中M 为无人机个数,L为物联网设备个数。
3.3 多变量固定交替迭代优化算法
基于上述两个子问题P1 和P2 的分析求解以及原始优化问题的迭代求解思路,最大化设备最小采集能量的迭代算法描述为:

算法3 的第1 行是对无人机发射功率和设备功率分割比的随机初始化,并设置算法收敛门限;第3、4 行是根据算法1 求解无人机最佳位置Ur+1和设备关联关系Br+1,其时间复杂度用O(P1)表示,相关分析见2.1 小节;第5、6行是根据算法2 确定无人机的最优发射功率Pr+1和设备的最佳功率分割比Rr+1,其时间复杂度分析见2.2 小节,用O(P2)表示。基于上述分析,可知算法3 的时间复杂度为O(r*O(P1)+O(P2)),其中r为迭代次数。此外由原始优化问题(10)中的约束(12)可知,无人机的最大可消耗功率使最小采集能量E 不可能无限制的增长,因此E 有界。且在算法3 中每迭代一次,E 值都会有所增加,因此算法3 最终可收敛。
4 实验结果及分析
在仿真实验中,20 个物联网设备随机分布在300m×300m的给定区域中,由3 个无人机提供服务,无人机最低飞行高度为10m,最高高度为30m;且考虑城区环境中空地路径损耗模型,即有(a,b)=(9.61,0.28)。

Table 1 Simulation parameter setting表1 仿真参数设置
此外,所有实验均利用Python 实现,且针对某个影响最小采集能量的因素,重复执行实验100 次,取平均值作为最终结果。基准对比算法的设置如下:①“Benchmark 1”:无人机位置和设备关联关系固定,联合优化无人机发射功率和设备功率分割比;②“Benchmark 2”:预先给定设备功率分割比,联合优化设备关联关系、无人机位置和发射功率;③“PSO”:利用PSO 算法联合优化设备关联关系、无人机位置和发射功率、设备功率分割比。
首先给出无人机和设备之间的关联关系以及无人机向每个设备传输的信号功率,如图3 所示。由该图可以看出,无人机仅向其关联设备传输功率,与无人机1 相关联的设备有1、10、11、12、18、19;与无人机2 相关联的设备为3、4、5、8、13、14、20;其余的设备与无人机3 相关联。经分析发现设备离无人机越近,无人机向其传输的功率越小,由此可以保证每个设备均能公平地采集能量。

Fig.3 Device association and UAV transmitting power图3 设备关联关系与无人机发射功率
图4 揭示了设备最小采集能量和设备最小接收数据速率与功率分割比之间的内在折中关系。在该实验中,设备的功率分割比已确定,设备接收速率阈值为γth=1.5Mbps,无人机的发射功率阈值为1W。该图给出了功率分割比从0.1 增加到0.9(每次增加0.1)且无人机位置和发射功率均为最优时,最小采集能量和最小接收速率的变化曲线。从图4 可以看出,最小采集能量随功率分割比的增大而减小,相反的是,最小数据接收速率随功率分割比的增大而增大。这也说明了在满足接收数据速率约束的前提下,优化功率分割比对最大化最小采集能量的重要性,从而表明所提算法相比于Benchmark 2 应当获得更优的最小采集能量,该结果在图5 中得到了验证。
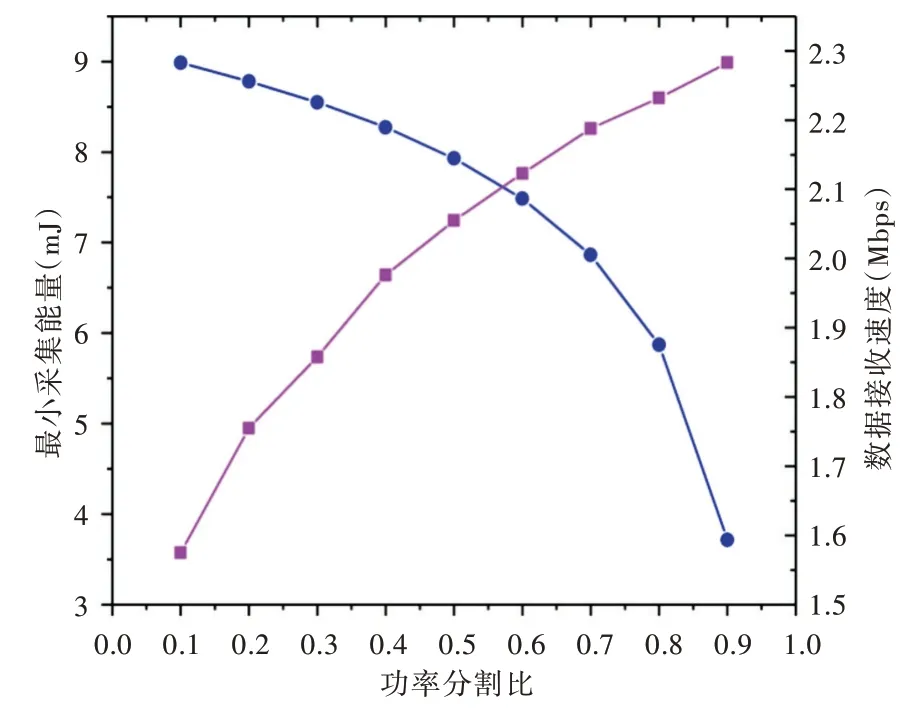
Fig.4 Minimal harvested energy and data receiving rate图4 最小采集能量与数据接收速率

Fig.5 Minimal harvested energy and rate threshold图5 最小采集能量与速率阈值
图5 给出了最小采集能量与速率阈值的变化关系。从该图中可以看出,最小采集能量随速率阈值的增大而减小。因为在无人机最大发射功率一定时,为了满足设备更高的速率要求,设备用于信息解码的功率越高,相应存储能量可用功率变小,故而设备最小采集能量随之减小。且从该图还可以看出,相较于Benchmark 1,本文算法通过优化无人机位置和设备关联关系,使最小采集能量平均提升了23.2%,此时算法信道增益更好;相较于Benchmark 2,本文算法通过优化设备功率分割比使最小采集能量平均提升了17.8%,此时即可使设备以较小的接收功率满足速率约束,又以更高的采集功率存储能量。相较于PSO 算法,在二者考虑优化变量一致的情形下,本文算法最小采集能量平均提升了12.4%。
图6 给出了两种情形下的最小采集能量,第一种情形下无人机最大可用发射功率为1W,第二种情形下为2W,两种情形下设备接收速率阈值均设置为γth=1.5Mbps。在Benchmark 2 方案中,设备功率分割比设为0.5。从图6 可以看出,无人机发射功率越大,最小采集能量越大。因为当无人机发射功率变大而设备速率约束不变时,设备用于采集能量的功率比例将随之变大,从而获得更高的最小采集能量。从该图还可以看出在两种情形下本文方案最优。在两种情形下与算法Benchmark 1、Benchmark 2、PSO 进行对比,最小采集能量分别平均提升了19.6%、15.5%、10.2%。

Fig.6 Minimal harvested energy and UAV transmission power图6 最小采集能量与无人机发射功率
图7 描述了算法3 的收敛性,在该场景中无人机最大发射功率设为1W,设备接受速率阈值设为1.5Mbps。每次迭代过程中,均涉及到设备关联关系、无人机位置、无人机发射功率以及设备功率分割比优化。从该图可以看出最小采集能量从初始值到最优值的收敛过程相当快,证明算法3 的有效性。
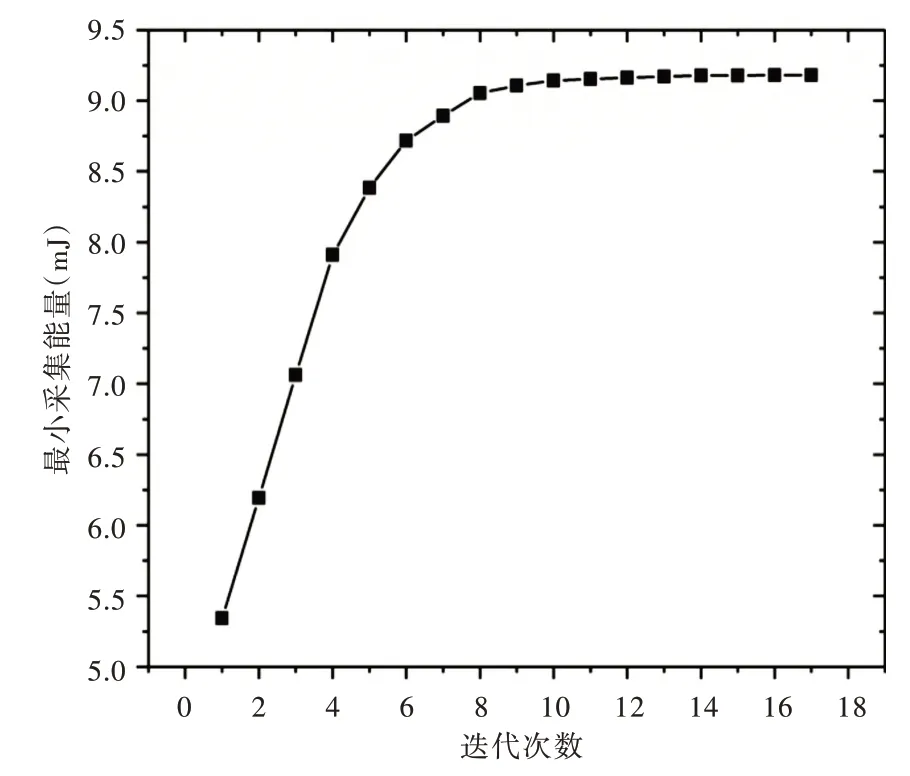
Fig.7 Convergence performance of Alternative iteration optimization algorithm图7 交替迭代优化算法收敛性能
5 结语
本文研究无人机辅助的物联网系统中无线信息与能量同传场景下的传输优化策略,通过综合考虑设备关联关系、无人机位置、无人机发射功率和设备功率分割比,提出了一个非凸非线性的最小采集能量最大化问题。本文基于分解思想,将该优化问题分解为两个子问题分别求解:在子问题1 中给定无人机发射功率和设备功率分割比,根据接收信号强度确定设备关联关系,利用禁忌搜索确定无人机部署位置;在子问题2 中给定设备关联关系与无人机位置,利用一阶泰勒展开式将非凸问题近似为凸问题求解,并提出一个多变量固定交替迭代优化算法迭代求解两个子问题。仿真实验表明,相比于基准方案,本文算法和策略可获得更优的最小采集能量。下一步将对各无人机可服务的设备数目进行优化,以在获得更高采集能量的同时最大化资源利用率。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
中国惯性技术学报(2019年6期)2019-03-04
无线互联科技(2017年24期)2018-01-22
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
物联网技术(2017年2期)2017-03-15
火控雷达技术(2016年3期)2016-02-06
浙江理工大学学报(自然科学版)(2015年10期)2015-03-01
中国交通信息化(2014年3期)2014-06-05
自动化与仪表(2014年10期)2014-02-26
科学时代·上半月(2013年2期)2013-04-15