无人机倾斜摄影1∶500不动产测量技术在侵蚀沟监测中的应用
2021-02-05 10:51周子渊高璐媛党维勤田金梅
中国水土保持 2021年2期
周子渊,高璐媛,党维勤,田金梅,刘 硕
[黄河水土保持绥德治理监督局(绥德水土保持科学试验站),陕西 榆林 719000]
侵蚀沟是黄土高原地区入黄泥沙的主要来源,尤其是发育程度较低、沟头活跃的长度小于500 m的侵蚀沟对入黄泥沙的贡献更大。通过侵蚀沟监测,可基本掌握其发育现状和发展状况,为黄土高原地区水土流失灾害预防提供基础数据和技术支撑。黄河流域全国水土流失动态监测与公告项目2019年度侵蚀沟监测是在2018年度项目基础上的延续,范围包括黄土高原地区的7条小流域,王茂沟小流域是其中之一。该项目采用基于差分高精度GNSS,对选定支毛沟沟头及断面进行测量,对侵蚀沟形状特征、发育条件、侵蚀特征、治理措施等进行监测,进一步构建了侵蚀沟稳定性评价指标体系。
目前在黄土高原侵蚀沟监测中,面临的主要问题有侵蚀沟坡面陡峭、沟壁内切,人力野外测量困难等,而无人机航测可以完美解决部分复杂危险地形人员无法抵达测量的情况。随着近年来无人机的迅猛发展及其在技术应用方面的不断创新,计算机视觉领域中SIFT、Bundler、PMVS等算法的不断完善,以及三维建模技术的发展成熟,可以将普通消费级无人机获取的图像通过Pix4D、Agisoft PhotoScan等软件构建出目标对象的稠密三维点云,使消费级无人机在航测中的应用成为可能。结合前人研究成果,考虑到在较为陡峭的坡度无人机获取的高程数据误差较大,而无人机倾斜摄影1∶500不动产测量技术(以下简称倾斜摄影)可以很好地解决陡峭坡度中数据误差较大的问题,我们借助黄河流域全国水土流失动态监测与公告项目2019年度王茂沟小流域监测数据,采用RTK人工测量断面和倾斜摄影建模断面提取两种方法,确定了两种方法的水平误差与高程误差,并获取了侵蚀沟高精度模型以及DOM、DEM等。
1 监测区概况
王茂沟位于陕西省绥德县,地处东经11°21′00″、北纬37°35′30″,属黄土丘陵沟壑区第Ⅰ副区,土地总面积5.8 km2。沿用2018年监测得到的王茂沟小流域尺度主断面和支毛沟位置(图1),本次选择王茂沟的一条支毛沟(4#)进行监测。该沟长度564.1 m,宽度230.7 m,面积7.9 hm2,纵比降0.22。

图1 王茂沟小流域4#支毛沟位置示意
2 监测硬件设备与软件工具
本次航拍使用设备为大疆精灵Phantom4 RTK,由无人机、云台相机、机载RTK模块、遥控器及配套的飞行控制软件GS RTK App组成。内置云台相机参数:分辨率2 048万像素,采用FOV84°,8.8 mm/24 mm(35 mm格式等效),光圈f/2.8~f/11,带自动对焦[对焦距离(m)为1~∞],采用三轴增稳云台,角度抖动量为±0.02°,可以在高速大动作飞行的情况下拍摄稳定的图像。
地面控制点测量采用华测导航i90惯导RTK及GNSS 惯导接收机,其平面精度为±(8+1×10-6×作业距离)mm,高程精度为±(15+1×10-6×作业距离)mm,支持北斗三代,自带惯导系统,支持60°倾斜测量,无需气泡对中,2 cm的倾斜补偿精度。
侵蚀沟建模采用Pix4D mapper软件,可以通过控制点辅助或直接根据图像对任意类型的图片进行处理,自动化地完成相机参数的解算与三维重建,获得亚厘米级精度,平面精度为1~2倍地面分辨率,高程精度为1~3倍地面分辨率。考虑到航图处理的运算量较大,采用了32 G内存、INTEL八代I9处理器图形工作站进行计算。
3 监测总体方案
本次监测流程主要包括数据采集、数据预处理、数据生产3个阶段。
3.1 数据采集
(1)像控点布设与测量。根据《1∶500、1∶1 000、1∶2 000 地形图航空摄影测量外业规范》(GB/T 7931—2008)的要求,为了深入评估建模精度,本研究沿切沟发育方向均匀布置了9个地面像控点,其中测区四角及中点5个用于建模精度控制,其余4个用于对比检查测量精度。像控点的标靶布设材料采用1 m×2 m的测绘布,标靶为红白交叉与数字组合。选定位置后将一台RTK主机连接短杆后直接插入钢管固定作为基准站,再持另一RTK主机测量各控制点处标靶的中心坐标作为该像控点的坐标。像控点测量的平面定位精度为5 mm,高程定位精度为10 mm,坐标系为WGS84。
(2)无人机参数设置与影像采集。①航线规划。设置一个80 m×80 m的正方形区域,覆盖整个航摄支毛沟,航线规划采用井字形方案,由两组互相垂直的航路正反方向飞行,航摄方案参数见表1。②相机参数设置。此次飞行航向与旁向重叠度为75%,相机云台俯仰角度为70°,自动曝光,无穷远自动对焦。无人机于2019年8月6日上午9时18分起飞,现场无风,天气晴好,光线充足,经过26 min32 s的飞行,无人机完成规划的航路任务后降落,共获得518张倾斜航图。
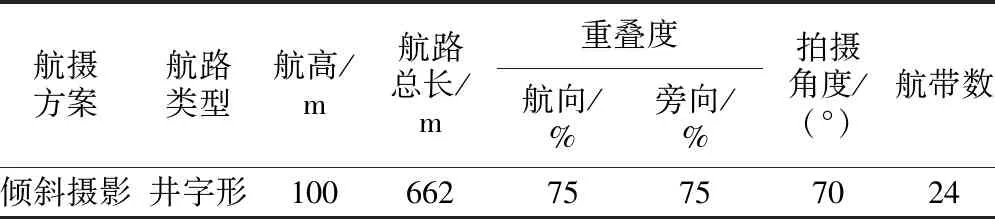
表1 航摄方案参数
3.2 数据预处理
依次进行影像质量检查(检查获取影像是否清晰、有无拖影等)、POS数据检查(数据获取是否正常等)、飞行质量检查(飞行轨迹是否按照规定航线飞行等)、像控点检查等预处理工作,确保数据无误后,导入Pix4D软件进行空三加密解算。
(1)POS数据检查。使用Pix4D软件导入航摄照片,导出POS数据,确认照片有无POS数据丢失情况。经检查,POS数据正常、无丢失。
(2)飞行质量检查。先使用Pix4D进行快拼,当天飞行当天检验,确定是否有漏片和丢片问题。再将航摄照片导入Smart3D软件中,使用软件的图像质量评估工具统计航图质量。如果评分低于0.5分,则存在曝光、对焦等问题,无法参加后续建模。经检查,各航图质量评分均在0.8分左右,可用于后期软件处理。
(3)像控点检查。使用Pix4D确保各像控点出现在2张以上航图中,本次检查结果满足要求。
3.3 数据生产
(1)初始化处理。将航图导入软件后,添加像控点。为了提高评估建模成果的精度,将地面控制点分为参考点与检查点两类。将本次布设9个像控点中的5个作为参考点,另外4个作为检查点,检查点不参与空间配准,可以通过检查点与其在切沟稠密点云中同名点的距离对切沟建模精度进行评估,通过软件自带功能全面高精度处理后生成质量报告。
(2)稠密点云生成与三维网格纹理构建。根据本研究精度要求,点云加密图像比例选择原图像尺寸,点密度选择最佳,三维网格选择高分辨率,由Pix4D软件自动生成。
(3)空间模型的生成。首先根据切沟的稠密点云,通过栅格插值算法得到其数字高程模型;然后通过三角剖分由切沟的稠密点云构建出切沟的三角网格模型,结合原始航图对其进行表面纹理贴图与着色,生成包含原始色彩纹理的三角网格模型;最后根据三角网格模型生成切沟的正射影像,用于量测分析与制图等。
4 结果与分析
4.1 精度评估
从参考点与检查点两方面对航图建模成果进行分析。结果表明,参考(地面控制)点x方向(经度)误差最大为0.073 m,y方向(纬度)误差最大为0.054 m,h(高程)误差最大为0.023 m;检查(地面控制)点x方向(经度)误差最大为0.031 m,y方向(纬度)误差最大为0.027 m,h(高程)误差最大为0.079 m。 参考点与检查点误差对比结果见表2。由表2知:各方向的误差值均没有异常;检查(控制)点各方向误差均在参考(控制点)误差范围内;检查(控制)点在3个方向均没有显著的误差,可以作为整体精度的评估指标。
参考国家测绘局2010年发布的《低空数字航空摄影测量内业规范》(GH/Z 3003—2010),在山地环境下,1∶500数字划线图(B 类)的平面位置均方根误差不应大于0.8 m,数字划线图(B类)的高程均方根误差不应大于0.7 m。本次项目精度水平满足1∶500比例尺的精度要求。
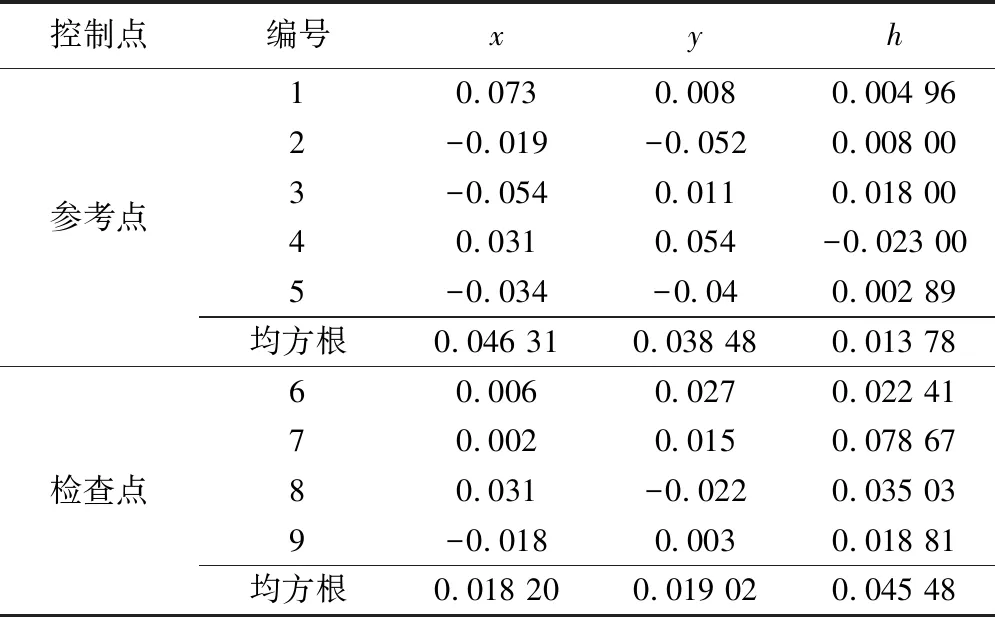
表2 参考点与检查点误差对比结果 m
4.2 生成DEM成果分析
(1)通过软件Pix4D构建的数字高程模型DEM,获取了分辨率为1.90 cm/pixel的切沟DEM与间隔为1 m的等高线图,见图2。由图2可见,等高线平滑、连续,可以较为准确地反映切沟的形态特征。

图2 4#支毛沟数字高程与等高线
4.3 RTK打点测量与DEM提取剖面分析
项目往期已在监测的支毛沟布设代表性监测横断面,在沟沿线以外地表比较稳定地段横断面两端延长线上各埋设一个固定测量标志,以便于观测、安置仪器。本研究使用往期布设的标志点,使用RTK对沟头剖面进行测量,获取沟头剖面线。同时,使用航图中获取的DEM数据,根据布设固定测量标志坐标,通过ArcGIS中3D Analyst工具提取相同位置沟头剖面线。
RTK获取断面与倾斜摄影提取断面高程差值见图3。通过对比发现,本研究提取的剖面线与RTK测量形成的剖面线基本重合,可以较为精确地反映沟头的剖面形态。
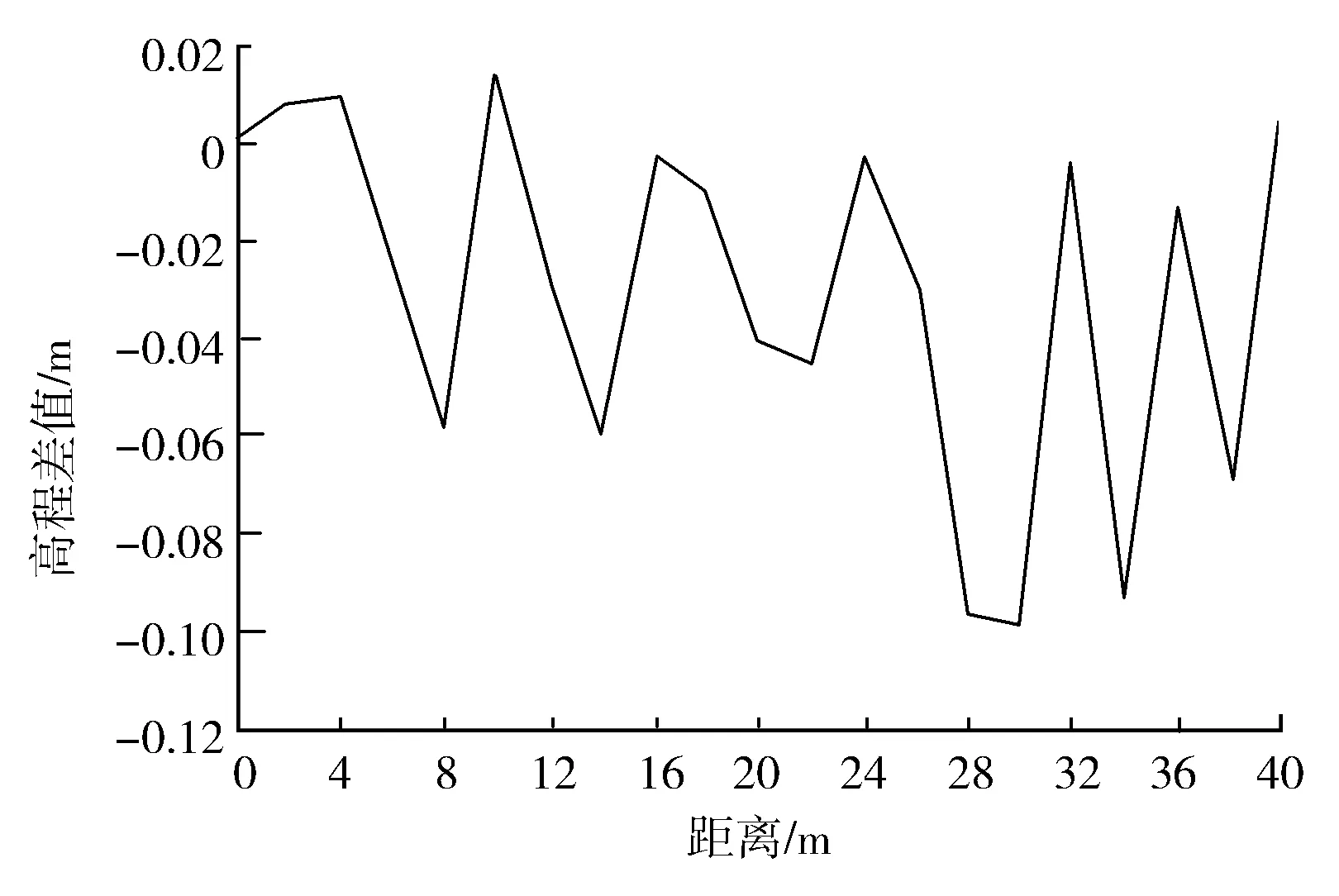
图3 RTK获取断面与无人机影像提取断面高程差值
5 结 论
本研究将消费级无人机与1∶500倾斜摄影测量结合,配合高精度的地面控制点,运用在小面积侵蚀沟监测的工作中,确定了两种方法的水平误差与高程误差,并获取了侵蚀沟高精度模型。通过本次研究,可以看出:
(1)通过地面控制点与建模后的误差对比,获得经度误差为0.018 20 m,纬度误差为0.019 02 m,高程误差为0.045 48 m,满足了《低空数字航空摄影测量内业规范》(GH/Z 3003—2010)的要求。
(2)无人机航测影像生成的点云数据,相比RTK人工打点测量与激光雷达扫描点云,更密集、均匀;避免了正射影像切沟、沟壁处高程数据精度不足的问题,为获得准确的侵蚀沟监测数据提供了可靠的保证。
(3)由于侵蚀沟内地形复杂、陡峭,RTK打点测量与激光雷达扫描点云工作量大,且有诸多不便,导致部分人无法到达的区域测量精度降低,而无人机航测能在保证精度的前提下,让侵蚀沟监测工作更高效、快捷。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
当代陕西(2020年23期)2021-01-07
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
国际呼吸杂志(2019年4期)2019-03-12
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
安徽地质(2016年4期)2016-02-27
现代计算机(2015年31期)2015-09-28
全球定位系统(2015年4期)2015-02-28