基于LTE-V2X的车联网资源分配算法
2021-02-05 03:03陈晓东石雪琴
计算机工程 2021年2期
余 翔,陈晓东,王 政,石雪琴
(重庆邮电大学通信与信息工程学院,重庆 400065)
0 概述
智能交通系统和自动驾驶被视为5G技术中的一个重要部分,其中,V2X(Vehicle to Everything)系统近年来备受人们的关注,其主要目标是提高道路安全和交通效率[1-2]。2016年9月,3GPP(the 3rd Generation Partnership Project)在第14版(R14)中首次发布了LTE-V2X的版本,该版本支持车辆通信并对LTE进行了一些根本性的修改,以满足高移动性的需求[3]。
3GPP R14中引入了专门为V2V通信而设计的2种新的通信模式,即集中式(Mode 3)和分布式(Mode 4)[4]。在Mode 3中,蜂窝网络选择并管理车辆用于其直接V2V通信的无线资源,在Mode 4中,车辆自主地为其直接V2V通信选择无线资源,Mode 4可以在没有蜂窝覆盖的情况下工作,其也为未来车联网的主要通信模式之一,车辆定期广播协作感知消息(Cooperative Awareness Messages,CAM),以告知邻居它们的位置和移动情况[5-6]。
在LTE-V2X环境下,资源分配算法是一个热门的研究课题,该类研究目前分为Mode 3和Mode 4 2类情况。文献[7]在Mode 3下考虑资源分配问题,当2个重叠的车辆组之间的分配发生冲突或合并公路时,有些车辆不能接收对方的信息,该文设计了具有不同复杂度和性能的算法来解决此类问题。文献[8]提出一种基于位置的资源分配方案,其根据车速、密度、方向和位置来分配不同的频率和时间资源,实验结果表明,该方案能够提高分组接收率(Packet Reception Ratio,PRR)。文献[9]考虑基于车辆位置信息的网络资源管理问题,其引入最小复用距离的概念,在最小复用距离情况下,同一资源可以被不同的发射机使用而不会影响那些处于感知范围内的接收器。文献[10]中的实验结果表明,定位的准确性会影响定位的误差率。对于Mode 4,文献[11-13]分析和优化3GPP标准的SPS算法参数。文献[14-16]对SPS算法进行修改或扩展,但保留其大部分功能。文献[14]使VUE(Vehicle User Equipment)更早地执行资源重选操作,以提前通知其他车辆它们将用于后续传输的资源。文献[15]为了达到高可靠和低延迟通信的目标,使VUE告知其他车辆将使用相同无线电资源发送的分组数量,使用合作的解决方案来降低传输碰撞概率。文献[16]中VUE只为较频繁且较小的分组保留资源,在不保留资源的情况下传输较少但更大的数据包。
本文提出一种针对高速道路场景V2V通信方案的两级自主资源分配机制。根据高速道路的通信场景对车辆的行驶方向进行决策并划分资源池,以减少不同方向的车辆同时发送消息时的干扰。为了降低并行方向剩余通道的干扰,提出一种改进的SPS算法,通过在占用资源时报告资源的位置来降低VUE的资源碰撞概率。
1 系统模型与问题描述
1.1 V2V通信场景及LTE-V2X简介
如图1所示,建立一个双向行驶的高速公路场景模型[17]。假设公路长为Lm,单向车辆密度分别为dl和dr,则该路段车辆总数为2L(dl+dr)。

图1 高速公路场景模型Fig.1 Highway scene model
LTE-V2X利用单载波频分多址(Single Carrier Frequency Division Multiple Access,SC-FDMA)并支持10 MHz和20 MHz的信道,如图2所示。信道分为1 ms子帧(Sub-Frame,SF)和180 kHz资源块(Resource Blocks,RB)。LTE-V2X将子信道(Sub-Channel,SC)定义为同一SF中的一组RB,每个SC的RB数量可以根据分组大小与使用的调制和编码方案(Modulation and Coding Scheme,MCS)而变化。数据通过传输块(Transport Block,TB)传输,并且在旁路控制信息(Sidelink Control Information,SCI)中发送控制信息。每个TB包含完整分组(如CAM),具有必须在同一SF中传输并且占用2个RB的相关联SCI,该分组可以是信标、CAM或其他任何事件驱动消息。每个TB具有关联的SCI,且两者都必须在相同的SF中发送。SCI占用2个RB,并且包括用于传输TB的MCS、TB占用的RB以及用于半持久调度的资源预留间隔(Resource Reservation Interval,RRI)的信息,此间隔是指车辆发送其分组而使用的周期(为100 ms的倍数),这些信息对于其他节点能够接收和解码传输的TB至关重要,因此,必须正确接收SCI,且TB及其相关的SCI必须始终在同一个SF中传输[14,18]。

图2 LTE-V2X的子帧和子信道Fig.2 Sub-frame and sub-channel of LTE-V2X
1.2 问题描述
1.2.1 Mode 4下的VUE干扰问题
在Mode 4下,设计eNodeB覆盖范围之外V2V操作时的一个基本思路是VUE自主选择V2V池中的资源以进行数据传输。由于不考虑集中调度,因此每个VUE必须独立做出其决定,但这可能导致同时发送VUE之间的干扰。在特定接收端,来自VUE的接收信号的信号干扰噪声比(Signal to Interference Plus Noise Ratio,SINR)可以表示为:

其中,PT表示每个VUE的固定发射功率,Gj是VUE-i和VUE-j之间的路径增益,包括天线增益、阴影衰落、路径损耗等带来的影响,N表示噪声功率,μj是在VUE-j一定通信范围内产生资源碰撞的VUE的集合,Vi表示VUE-i在相同SF不同RB间产生带内辐射的VUE的集合是VUE-i对VUE-j造成的带内辐射的增益系数。
式(1)右侧分母中的第1个干扰项对应重复使用同频资源(即资源冲突)而引起的同信道干扰。当干扰VUE信号的接收功率远大于预定信号的接收功率时,干扰VUE信号可以掩蔽另一个预定信号,即在一般情况下,需要避免邻近VUE之间的资源冲突。式(1)右侧分母中的第2个干扰项是由带内发射问题(IBE)引起的,IBE是同一SF不同RB上接收功率相差很大造成的干扰泄露问题。根据文献[19]采用的模型,IBE的典型电平可能比预期信号功率低20 dB~30 dB。因此,当来自不同传输信号的接收功率之间存在很大差异时,可能在V2V中产生明显的干扰。
1.2.2 SPS算法存在的问题
LTE-V2X下的SPS算法基于感知的每个RB的能量大小来列出空闲资源,每个车辆决定何时需要重新选择资源,这使得资源在使用中更加受限,并且至少需要20%的空闲资源才能选择合适的可用资源,以及资源重选的资源块存在位置不确定性,当VUE的数量较多时,容易发生资源冲突问题。
2 基于行车方向的SPS算法
2.1 基于行车方向的资源池划分
由于CAM消息是以周期性广播的形式被发送,因此此时作为发送方的VUE一定少于接收消息的VUE。当行驶在不同方向上的车辆同时作为发送端的可能性大于同时作为接收端,且两车之间的距离较近时,会产生邻频或同频干扰,从而降低了VUE的PRR并影响了VUE的体验感受。
本文提出基于LTE-V2X的车联网资源分配算法。在第1阶段,根据车辆的行车方向将资源池分成2个子资源池,子资源池被分配给沿左右方向移动的VUE,如图3所示。将不同方向的VUE划分到不同的资源池上以减少对彼此的干扰。

图3 基于行车方向的资源池划分Fig.3 Division of resource pool based on driving direction
由VUE选择的资源池可以描述为:

从图3可知,还可以根据不同方向的交通流密度预先配置不同的子资源池大小ρA和ρB,该方法可以与其他分布式资源分配机制相结合,以进一步降低每个子资源池中的干扰。
2.2 SPS资源分配算法
在LTE-V2X Mode 4的SPS算法中,每个车辆根据信道感知结果独立选择传输资源,并保留所选资源供今后使用。SPS算法主要分为感知(Sensing)、可用资源选择(Selection)和资源重选(Reselection)3个过程。
2.2.1 Sensing过程
Sensing过程即通过感知窗口(Sensing Window,SW)中其他VUE使用的RB情况来确定SW中的资源是否可用。在SW中,监测最近的1 000个SF,VUE不断接收直通链路接收信号强度指示(Sidelink Received Signal Strength Indicator,S-RSSI)阈值以确定给定RB是否正在被使用,若信号大于该阈值,则RB被认为繁忙。该标准没有指定阈值的具体取值,但是3GPP工作文档[20]通常通过添加-107 dBm/RB来计算该阈值。
根据Sensing结果,将信号小于阈值的RB作为可用资源,VUE创建自己的可用资源列表Sa,该列表包括所有可用资源,但符合如下条件的资源除外:RB的S-RSSI高于一定的阈值,且资源被其他车辆占用。如果Sa的资源少于20%,增加3 dB参考信号接收功率(Reference Signal Received Power,RSRP),直到Sa的可用资源超过20%,否则继续执行上述步骤。
2.2.2 Selection过程
VUE在选择窗口中找出最优的20%资源,即在Sa中具有最低S-RSSI值的20%资源,然后车辆随机选择最优20%资源中的传输资源,此时会产生一个资源计数器Rc。下一个资源选择的Rc值取决于CAM的RRI,通常CAM的Rc取值为5~10。
2.2.3 Reselection过程
Rc的值在每次广播消息后减少1,如果Rc=0,则需要重新选择分配机制来决定是否保持相同的资源概率ρ以维护其资源,或用概率(1-ρ)重新选择资源。SPS算法描述如下:
算法1SPS算法


SPS算法产生显著数据包冲突[21]的一个原因是VUE所选择的下一个资源位置具有不确定性。事实上,在SPS算法中,没有规定VUE可以为资源池中的下一个RB传递其所选位置的信息,虽然随机选择传播资源是减少冲突所必需的,但是存在随机性成本,其碰撞概率不能被最小化。尽管Sensing提供了在SW中使用的可能位置的一些信息,但是通过该信息难以确定性地防止碰撞。
2.3 SPS资源分配算法优化
为了解决SPS算法中Reselection不确定性所带来的资源选择碰撞问题,本文让每个数据包为下一条数据包携带资源位置信息。因此,需要一个小的扩展用于存储SCI,大小约为2 Byte,以在传输时获得更高的可靠性,在需要时宣布下一个资源位置、RC和冲突位置。上述过程不依赖于感知过程,从而减少了由于资源选择而可能发生的数据包冲突。此外,当Rc的值越大时,位置变化越不确定,要求每个VUE在Rc=1时提前确定下一个资源块的位置,如图4所示,由于这些位置信息在Rc=0之前就已确定,如果选择相同资源的VUE即有机会改变所选的RB并公布新调整的位置。如图5所示,在开始时刻,VUE1和VUE2因选择同一资源块而产生冲突,在携带位置信息后,VUE2在Rc=0时已经知道VUE1所要占用的资源块,因此,VUE2移动到不同的资源位置,从而避免发生资源块冲突问题。
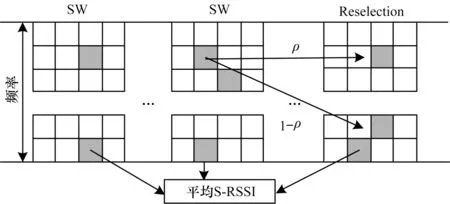
图4 SPS算法的资源重选过程Fig.4 Resource reselection process of SPS algorithm

图5 携带位置信息的Reselection示意图Fig.5 Schematic diagram of Reselection with location information
在Sensing过程中,每次感知的时间复杂度都为常数级别,T1(n)=O(c),其中,c为常数;在Selection过程中,需要对每一个资源块进行遍历,即时间复杂度为线性,T2(n)=O(n);Reselection过程的时间复杂度也是常数级别,即T3(n)=O(c)。总的时间复杂度为T(n)=T1(n)+T2(n)+T3(n)=O(c)+O(n)+O(c),使用大O(n)计数法将总时间复杂度表示为T(n)=O(n)。总的空间复杂度为S(n)=O(n)。
3 仿真结果与分析
将本文算法与随机资源分配算法、SPS资源分配算法进行实验对比,表1所示为主要仿真参数设置。

表1 仿真参数设置Table 1 Simulation parameters setting
本文算法使得每辆车定期向其所有邻居广播一个固定大小的信标,目的是通知它们该辆车的存在。这种应用与公共安全密切相关,因此,需要可靠、低延迟的无线通信。在实验评价方面,本文采用以下性能指标[17]:
1)PRR,定义为一定时间内所有发送的数据包中成功接收的数据包数量和全部数据包数量的比值,计算公式如下:

其中,Nsuccess是成功接收到的消息总数,Ntotal是在原始车辆通信范围内的消息总数。
2)碰撞率(Collision Ratio,CR),为通信范围内碰撞链路数与链路总数的比值,计算公式如下:

其中,Lcollision表示通信范围内的碰撞链接数,Ltotal是模拟中的链路总数。
3)累积分布函数(Cumulative Distribution Function,CDF)曲线。
在消息大小分别为190 Byte和300 Byte时3种算法的PRR对比结果如图6、图7所示。从图6、图7可以看出,随着传输距离的增加,PRR降低,路径损耗和干扰增大,且随机资源分配算法的性能始终最差,这是因为其每次均随机选择分配,很容易产生资源碰撞,导致PRR最低。本文算法在250 m距离内发送190 Byte的PRR保持在90%以上,发送300 Byte的PRR也保持在80%以上,因此,该算法能够满足实际需求。

图6 消息大小为190 Byte时3种算法的PRR对比Fig.6 PRR comparison of three algorithms when message size is 190 Byte

图7 消息大小为300 Byte时3种算法的PRR对比Fig.7 PRR comparison of three algorithms when message size is 300 Byte
图8所示为3种算法的CR对比结果,从图8可以看出,随机资源分配算法的CR最高,这是因为其资源块的选择随机性较大,容易发生冲突,本文算法CR最低,其碰撞率显著降低且性能更加稳定。
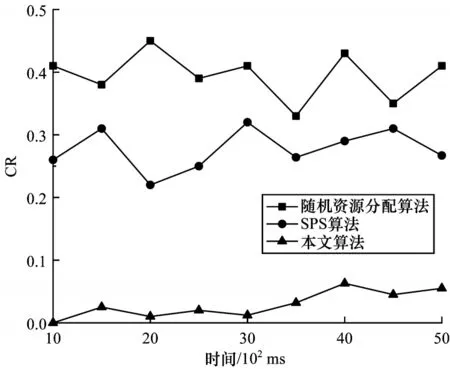
图8 3种算法的CR对比Fig.8 CR comparison of three algorithms
图9所示为3种算法的CDF曲线对比结果。从图9可以看出,对于随机资源分配算法,约有21%的VUE的PRR大于80%,而本文算法约有75%的VUE的PRR大于80%,即该算法的性能优于2种对比算法。

图9 3种算法的CDF对比Fig.9 CDF comparison of three algorithms
4 结束语
本文对SPS资源分配算法进行改进,提出一种基于LTE-V2X的车联网资源分配算法。对不同方向的车辆进行资源池划分,以降低VUE之间的干扰,在资源重选时,采用在占用资源时报告资源位置的方式来减少VUE资源碰撞的概率,从而提高PRR并减少资源冲突的发生。仿真结果表明,相对传统SPS算法,该算法的PRR值较高,CR值较低。本文分析的是分布式资源分配方式,下一步将联合集中式资源分配方式以进行混合资源分配算法研究。
猜你喜欢
英语文摘(2020年10期)2020-11-26
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年7期)2018-12-09
网络安全和信息化(2018年4期)2018-11-09
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
计算机应用(2016年10期)2017-05-12
火控雷达技术(2016年3期)2016-02-06
浙江理工大学学报(自然科学版)(2015年10期)2015-03-01