
一种折反式激光半主动导引头光学系统
2021-02-07 12:52宋岩峰孙卫平
激光与红外 2021年1期
宋岩峰,郝 群,孙卫平,刘 灏,李 杰
(1.西安现代控制技术研究所,陕西 西安 710065;2.北京理工大学光电学院,北京 100081)
1 引 言
激光半主动制导具有制导精度高、首发命中率高、抗干扰能力强、结构简单、成本较低、使用方便等特点,被公认为一种成熟、精确的制导体制,被广泛应用于各类战术武器装备中[1-2]。激光导引头作为激光半主动制导武器的关键部件,通过前端光学系统接收激光照射器照射在目标上的激光漫反射回波,并在四象限探测器靶面上形成一定大小的光斑。通过计算四象限探测器上激光光斑的重心位置,解算出弹目参数后发送给制导控制系统,从而形成制导回路[3-4]。
光学系统作为半主动激光导引头的关键部件,其性能好坏直接影响着导引头的探测距离和制导精度等重要指标。在结构实现形式上,通常有折射式结构和折反式结构等两种。其中,折射式光学系统的优点是结构简单、中心无遮拦、光能损失小、容易实现大视场、成本较低等。但是,折射式光学系统存在着光学元件口径不宜过大、轴向尺寸较大等缺点。文献[3]给出的激光半主动导引头光学系统,焦距为21.6 mm,轴向尺寸则达到了52.8 mm;折反式光学系统的优点则是光学元件相对较少、轴向尺寸较小、口径容易做大、体积相对更小、重量相对更轻等,更适用于口径较大、作用距离较远的制导导弹武器系统[5-6],如美军的AGM-114K“Hellfire”激光半主动反坦克导弹,如图1所示。
图1 AGM-114K“Hellfire”激光半主动导引头
针对某远程反坦克导弹激光半主动导引头的技术指标要求,对折反式激光导引头光学系统的结构、参量、光斑要求和像差校正等进行了分析,设计了折反式激光半主动激光导引头的光学系统。
2 设计参数要求
2.1 导引头战术指标要求
(1)工作波长:1.064 μm;
(2)探测距离:优于8 km;
(3)线性视场:不小于±3°;
(4)瞬时视场:±6°;
(5)测角精度:优于0.2°;
(6)激光照射距离:不小于2 km;
(7)激光照射能量:不小于50 mJ;
(8)目标漫反射率:不小于0.4;
(9)探测器直径:Φ10 mm;
(10)目标视线与导引头光轴的夹角:不大于45°。
2.2 光学系统参数设计
光学系统参数决定了光学系统的性能,影响着导引头的探测距离、搜索和跟踪能力,以及导引头的测角精度,从而影响到激光制导武器系统的整体作战效能。激光半主动导引头光学系统的主要参数包括有效通光口径和系统焦距等。
(1)有效通光口径
探测距离作为激光制导武器的关键参数,直接影响着制导武器的作战性能。激光导引头的探测距离不仅与激光照射系统、导引头接收系统的性能有关,还和目标的漫反射率以及大气消光系数等有关[7]。激光导引头探测器接收到的激光回波信号功率Pr可通过以下公式进行估算:
(1)
式中,Qt为照射激光脉冲能量;τt为照射激光脉冲宽度;ρ为目标反射率;R1为激光目标指示器与目标之间距离;R2为导引头与目标之间距离;α为大气消光系数;Ar为导引头光学系统接收孔径面积;Tr为导引头光学系统透过率;θ为目标视线与导引头光轴的夹角。
假设照射激光脉冲能量Qt=0.05 J,垂直靶面进行照射;照射激光脉冲宽度τt=15 ns;目标反射率ρ=0.4;激光目标指示器与目标之间距离R1=2 km;导引头与目标之间距离R2=8 km;大气消光系数α=0.12;导引头光学系统接收孔径Φ65 mm,即Ar=33.2 cm2;导引头光学系统透过率Tr=0.3;目标视线与导引头光轴的夹角θ=45°,可以估算激光回波信号功率Pr值为1.4×10-6W。
光电探测器的探测灵敏阈值表明探测器所能探测到的最小脉冲功率,单位W。目前,四象限光电探测器的探测灵敏阈值优于1×10-7W。因此,系统有效通光孔径应不小于Φ65 mm。为了压缩系统的轴向长度,本系统采用折反式结构。
折反式光学系统的有效入瞳面积S为:
(2)
式中,D1为主反射镜口径;D2为次反射镜口径。
光学系统的有效入瞳直径D为:
(3)
假设D1=80 mm,D2=40 mm,那么光学系统的有效口径D=69.3 mm,大于65 mm,可以满足系统8 km的探测距离要求。
(2)系统焦距
对于激光半主动制导导弹,从目标方位测角精度来考虑,其光学系统的瞬时视场越小越好;从导引头捕获目标能力方面考虑,光学系统瞬时视场较大为好。因此,光学系统的瞬时视场要同时考虑以上两个因素对导引头整体性能的影响。
依据光学系统技术要求,系统瞬时视场要求为2ω=±6°,选择的探测器直径Dd=10 mm,可以计算光学系统焦距f′:
(4)
2.3 激光光斑要求
激光半主动制导光学系统属于非成像系统,但是光学系统的像差可能会引起激光光斑位置产生偏差以及能量的分布不均,从而影响导引系统的测角精度。
因此,激光半主动导引头对其光学系统的光斑也提出了相应的要求[8-9]:
(1)通常情况下,激光光斑直径要求为探测器光敏面直径的一半。在线性视场范围内,四象限探测器要求激光光斑均有分布,且四个象限均有响应。激光光斑直径越小,线性区虽然越大,但是测角精度则会越低;光斑直径越大,线性区则越小,可能会对系统的稳定跟踪产生影响。
(2)光斑能量分布要求均匀。光斑能量分布不均会使得解算光斑中心位置产生偏差,从而影响系统的测角误差。
(3)确保光斑的圆度,即光斑应为圆形。如果光斑不圆,由于形状的不均而产生光斑位置误差,从而影响测角精度;
(4)线性视场内要求光斑稳定。线性区不同视场,四象限探测器要求光斑大小一致。国内四象限激光探测系统要求光斑稳定性一般为3 % ~ 5 %,国外一般要求优于3 %。
3 折反式光学系统设计
3.1 结构选型
在各种飞行器和导弹的搜索跟踪系统中,光学系统结构的小型化和轻量化是设计的重要标准,R-C双反射光学系统以其结构尺寸小、质量轻、大口径等优势成为主要选择[10]。为了避免使用非球面,R-C双反射光学系统主反射镜设计为球面反射镜;同时,将次反射镜简化为平面反射镜,以降低次反射镜装调的复杂程度。但是,在不使用非球面的情况下,两反射镜式光学系统难以保证系统视场和像差校正。因此,本系统在次反射镜后距离像面附近增加校正透镜元件,从而保证系统像差校正有着足够的变量和校正后的光斑质量。由于校正透镜元件处在会聚光路中,其尺寸比系统口径小得多。另外,为了提高光学系统的抗干扰性能,在光路中加入消杂散光光栏和窄带干涉滤波片,以减弱或消除背景光及杂散光对目标方位测角精度的影响。光学系统结构示意图如图2所示。
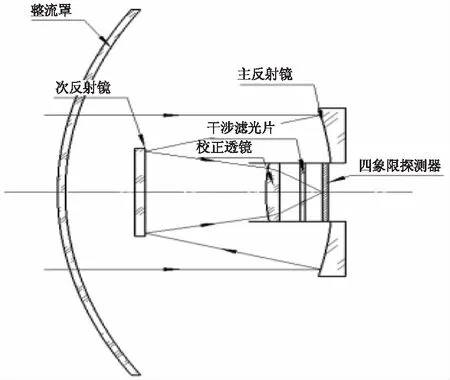
图2 折反光学系统结构示意图
3.2 像差校正的考虑
半主动激光制导武器通常工作在单一激光波长,且在接收光学系统中设置了窄带滤波片。因此,激光制导武器的接收光学系统像差校正通常只考虑单色像差,包括球差、彗差、像散、场曲和畸变等。其中,球差为轴对称性像差,不影响激光光斑的均匀性,只影响弥散斑的大小,在光学设计中对球差大小和离焦量进行控制得到要求大小的光斑;彗差、场曲和像散,作为轴外像差,对光斑形状和均匀性有一定的影响;畸变的存在则对导引头测角解算的正确性产生影响。因此,这几种像差需在设计过程中进行综合考虑。
3.3 设计结果及质量评价
综合激光导引头的总体技术要求,依据选定的四象限探测器特征参数,对激光半主动导引头折反式光学系统进行了设计,主要参数如下:有效焦距47.5 mm,有效入瞳口径70 mm(主反射镜直径80 mm,次反射镜直径40 mm),相对孔径0.67,轴向长度51.5 mm,离焦0.25 mm,光学系统结构如图3所示。
点列图可以反映不同视场的光斑大小和能量分布,对分析光斑分布均匀性有重要的指导意义。图4分别给出了线性视场内0°、1°、2°和3°视场的光斑点列图。可以看出,各视场光斑直径大小均为Φ5 mm(探测器光敏面直径Φ10 mm,光斑直径要求为光敏面尺寸的一半),稳定且分布均匀,满足四象限探测对光斑尺寸和光斑质量的要求。
图5分别给出了瞬时视场0°、1°、3°、4°、5°和6°的光斑点列图。可以看出,光斑直径最大变化量约0.08 mm,光斑直径稳定性优于2 %。
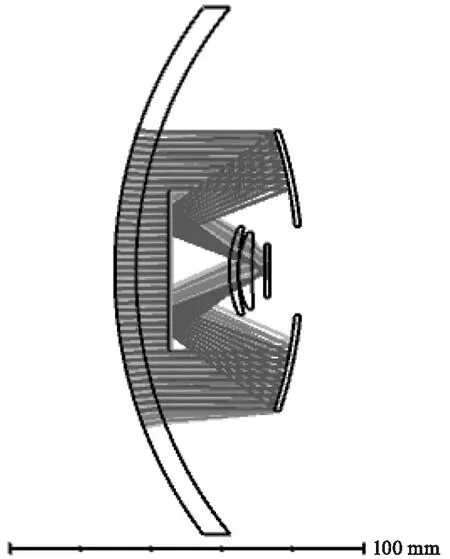
图3 光学系统结构图
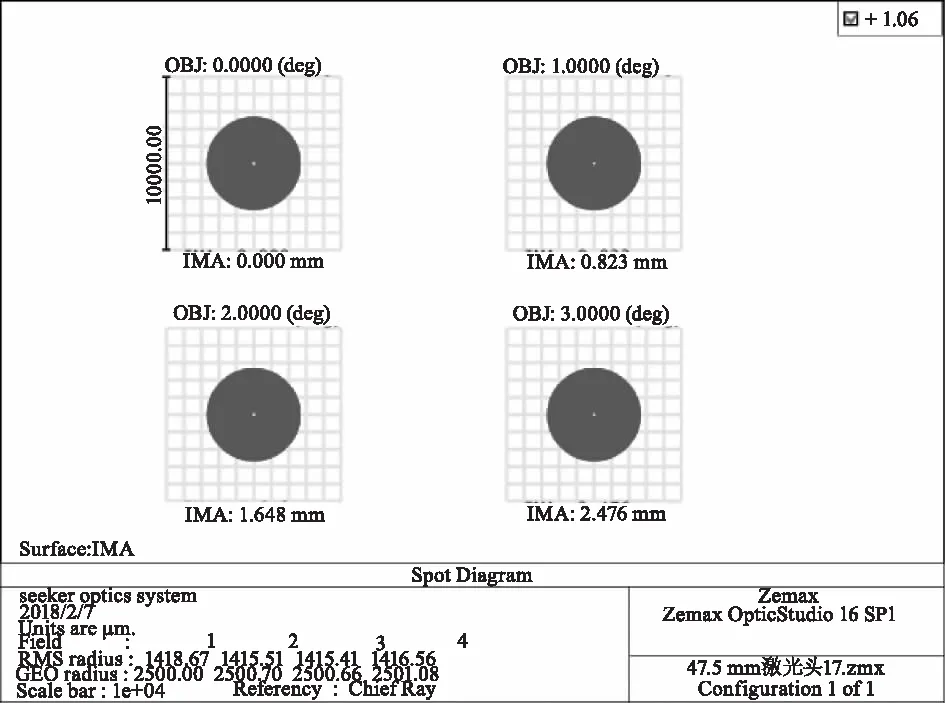
图4 线性区不同视场点列图
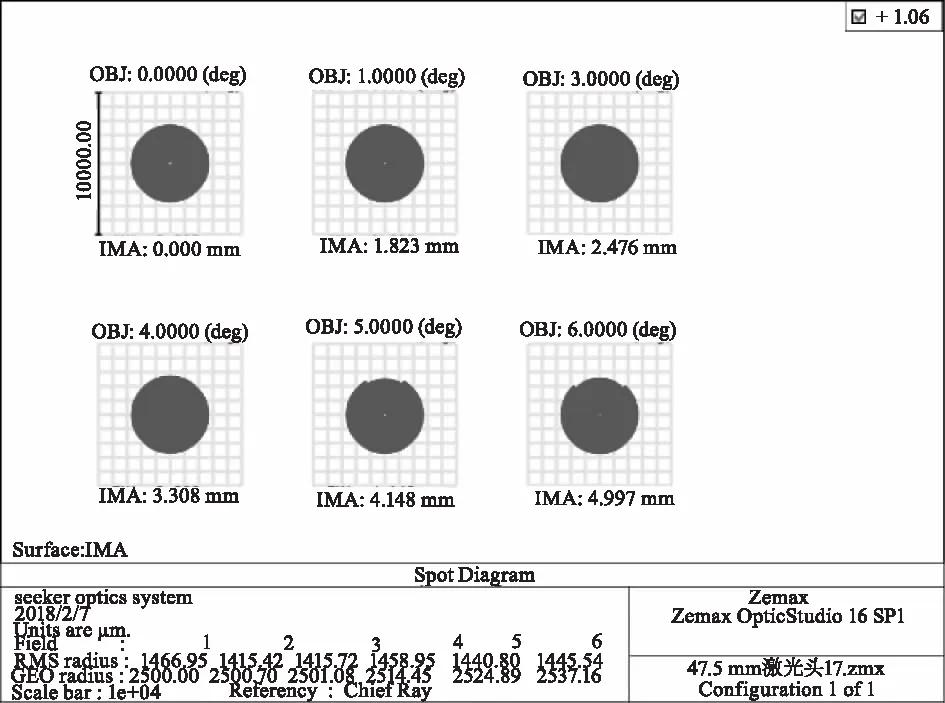
图5 不同视场点列图
光线足迹图可以显示不同视场光斑在探测器光敏面的位置,直观得出光斑和探测器中心的相对位置。图6分别给出了0°、1°、2°和3°视场的光斑痕迹图。可以看出,视场为3°时,光斑边缘与探测器边缘重合,满足线性视场±3°的系统指标要求。
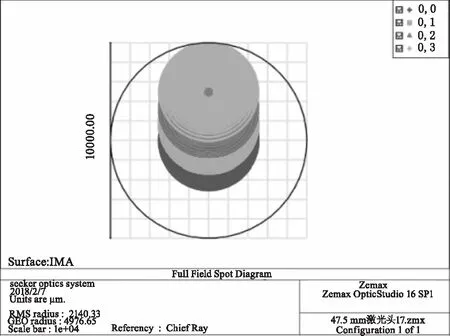
图6 光线足迹图
包围圆能量曲线表示光斑能量随光斑直径的分布情况。图7给出了0°、1°、2°和3°视场的包围圆能量曲线。可以看出,整个线性视场的光斑能量分布均匀一致。
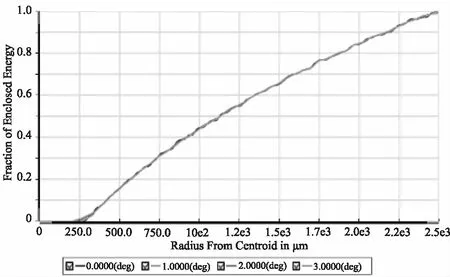
图7 包围圆能量曲线
畸变不仅影响不同视场光斑直径稳定性和光斑能量分布稳定性,还直接决定着系统的线性度,是激光导引头光学系统的一个重要的技术指标。图8给出的畸变曲线表明,本系统线性区畸变可控制在0.2 %以内,满足此类光学系统畸变通常在0.5 % 之内的设计要求。
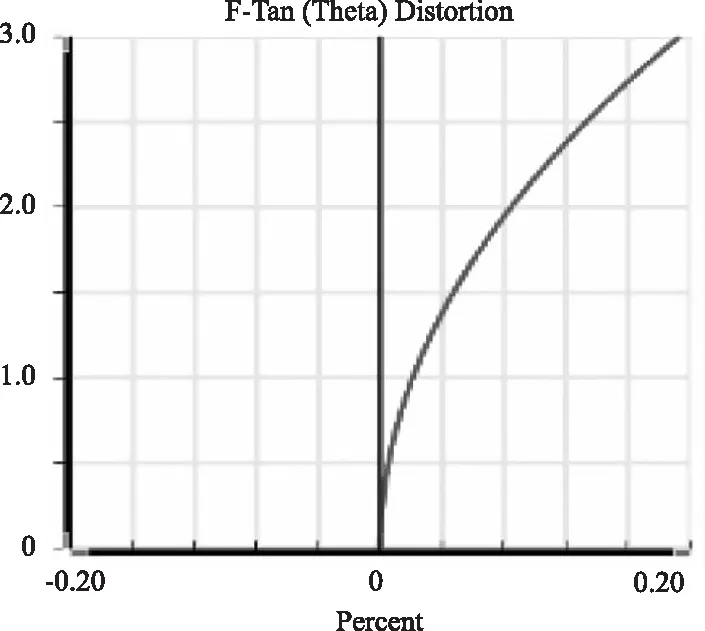
图8 系统畸变曲线
4 结 论
依据半主动激光导引头的总体指标要求,分析、计算了折反式激光导引头光学系统的关键参数。进行了光学系统结构的选型,分析了激光导引头光学系统的像差和光斑要求,进行了光学系统设计。仿真结果表明,整个线性视场范围内,折反式激光导引头光学系统光斑直径稳定无变化,能量分布均匀一致;瞬时视场范围内,光斑直径稳定性优于2 %。设计结果很好地满足了系统的设计要求,为激光半主动导引头的下一步研制奠定了良好基础。
猜你喜欢
新能源科技(2022年9期)2022-11-20
装备制造技术(2020年11期)2021-01-26
环境技术(2020年1期)2020-03-06
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
汽车工程学报(2015年6期)2016-03-23
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
弹箭与制导学报(2015年1期)2015-03-11
