基于玉米根系保护的株间除草机器人系统设计与试验
2021-02-14 01:55权龙哲张景禹李恒达杨春杰张溪麟
农业机械学报 2021年12期
权龙哲 张景禹 姜 伟 李恒达 杨春杰 张溪麟
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
目前,机械除草是继化学药剂除草后的一种广泛被人们接受的除草方法[1-2],具有重要的研究意义和广泛的应用前景。根据田间不同的杂草控制区域,机械除草又通常分为行间除草和株间除草[3-5]。行间杂草通过中耕除草的方式相对容易除去,但是株间杂草的控制相当困难,因为清除靠近农作物的杂草存在误伤农作物的高风险[6-7]。目前,株间除草模式的优化和创新成为许多学者的研究关注点[8-11]。
关于株间机械除草的研究大多以伤苗率和除草率作为衡量除草性能的指标[12-14],而对机械除草过程中末端执行器存在损伤作物根系的高风险问题关注较少。谭国强等[15]设计的玉米地中耕次数对玉米产量影响的试验表明,免中耕和中耕次数少的玉米根系量都明显多于中耕次数多的。此外,试验还发现中耕后的玉米根系在垄体内分布不均匀,顺垄向的较多,横垄向的较少,而免中耕与此相反。因此,在设计机械除草结构和除草模式时,应该充分重视末端执行器可能伤害作物根系的问题。
机械除草过程中为了“多除草,少伤苗”,不但要改善除草机构或除草模式,同时对目标物体的精准检测也十分关键。传统的农作物检测方法有RTK-GPS(Real time kinematic-global positioning system)、激光、超声波和光谱等[16-19],而且上述方法都只是单一检测农作物目标,对杂草则进行忽略。目前,以深度学习技术为基础的检测方法在农业中的应用越来越广泛,该技术具有强大的目标特征学习能力[20],不但能够检测作物还能检测杂草,甚至给杂草分类。WU等[21]对苹果花进行检测,将使用的YOLO(You only look once) V4检测模型进行通道修剪,修剪后的参数量减少了96.74%,模型占用内存减少了231.51 MB,但是平均准确率均值(Mean average precision,mAP)仅降低了0.24%。TIAN等[22]对苹果进行检测时,将YOLO V3低分辨率的特征层引入DenseNet以增加特征的传输量和复用率。QUAN等[23]以VGG19为主干网络改进了Faster R-CNN,完成对复杂田间环境下不同生长阶段的玉米幼苗的检测,准确率高达97.71%。
本文依据东北地区玉米垄作的种植方式以及苗期株间除草的作业要求,并且充分考虑到机械除草过程中末端执行器损伤作物根系风险的问题,设计一种基于玉米根系保护的株间除草机器人系统。该除草机器人根据土上避苗除草模式进行株间除草作业,同时能够降低除草装置末端执行器损伤作物根系的风险,以期达到保护玉米根系的目的。
1 除草机器人系统组成和工作原理
1.1 机器人移动平台
机器人移动平台是除草装置的挂载体,是整个除草机器人系统正常工作的保证,其虚拟样机[24]如图1所示。该机器人移动平台由车体、车轮、升降装置、挂载架等组成,车体中主要包括控制系统和供电系统。移动平台前轮为2个万向轮,后轮是驱动轮,由轮毂电机驱动,通过驱动轮差速实现机器人平台转向;移动平台分为遥控和手动2种操控方式。机器人平台的轮距可调,以满足不同行距的除草作业需求。
机器人移动平台共搭载3块60 V、60 A·h锂电池,其中2块并联并分别固装在车体两侧的行走单元机箱内部,为轮毂电机供电。第3块为挂载装置供电,同时作为机器人平台的备用电源,保证平台8 h的续航作业需求。为了便于不同设备对电源电压的需求,平台上配备一台2 000 W、60 V转220 V的逆变器(锐帝YT-2000PB型)。该机器人移动平台其它技术参数如表1所示。
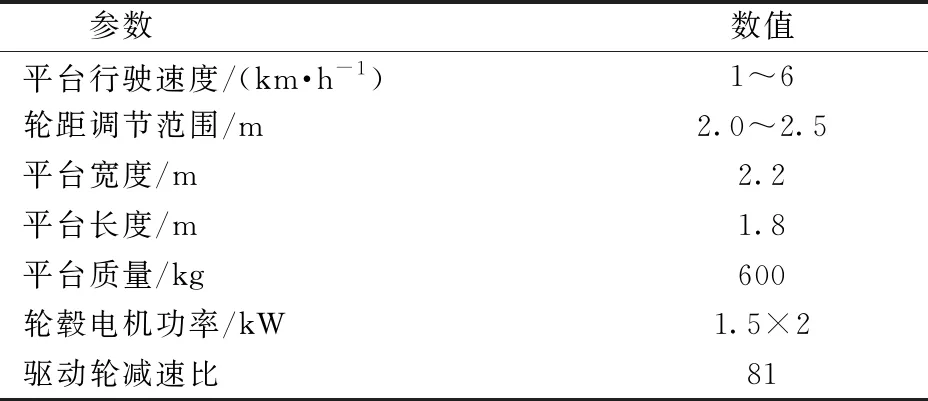
表1 机器人移动平台主要参数Tab.1 Main technical indicators of robot mobile platform
1.2 除草系统构成
除草系统主要由视觉检测系统、控制系统和机械除草装置3部分组成,如图2所示。视觉检测系统包括图像获取、图像处理和信息输出,将提取到的信息传给控制系统。控制系统自我校正后对收到的信息进行编译并最终控制机械除草装置的伺服电机和步进电机转动,完成除草铲水平开合以及竖直方向升降运动。另外,当视觉检测系统检测到的杂草不满足除草条件时,则不发送信息给控制系统。
1.3 避苗除草原理
除草作业过程如图3所示,只有当株间有杂草且在作物保护区以外时,两侧除草铲同步进行下降与闭合运动,将杂草切断或夹住,配合移动平台的向前运动,使杂草发生移动,达到除草目的。除草铲闭合状态持续到下一株玉米苗前,然后迅速张开与上升恢复到初始位置,完成避苗并等待下一次除草指令。以上除草过程定义为土上避苗除草模式,运动轨迹如图4中的蓝线所示,其中蓝实线为闭合状态(除草状态),蓝虚线为非完全闭合状态(避苗状态)。
当除草铲在作业过程中省去竖直方向的运动,且始终置于地表以下,则定义为土下避苗除草模式,其运动轨迹如图4中的黄线所示。其中黄实线为闭合状态(除草状态),黄虚线为非完全闭合状态(避苗状态)。
2 除草系统设计
2.1 除草装置设计
2.1.1硬件选型
除草装置中控制除草铲水平运动的动力源采用直流低压伺服电机,型号为XK60A2A02080-SCK。其供电电压24 V DC,额定电流7.5 A,额定扭矩1.27 N·m,额定转速5 000 r/min。根据电动机选取DM-806A型驱动器,适用于驱动小功率直流伺服电动机,供电电压24~50 V DC;最大连续电流达30 A;具有位置控制模式、速度控制模式和电流(转矩)控制模式;支持RS232通信,具有温度保护,过流、过压、欠压保护等功能,可靠性高。
减速器为行星减速器,减速比为16;直角齿轮箱为1根输入轴,2根输出轴,减速比为2;控制除草铲竖直方向运动的丝杠步进电机为57BYGH型混合式步进电机,步距角1.8°,静力矩1.6 N·m,相电流3 A。
2.1.2除草单体结构设计
玉米田株间除草装置简化模型如图5所示,该除草单体结构可以实现除草铲的空间运动和平面运动2种运动方式,完成土上避苗除草模式和土下避苗除草模式的除草作业。
除草铲空间立体运动包括水平方向和竖直方向运动。除草铲的竖直方向运动主要由丝杠步进电机、光轴与滑块组成的直线滑台模组完成;水平方向上的左右开合运动是由伺服电机连接减速器,通过直角齿轮箱将绕x轴的旋转运动转换成绕z轴的旋转运动,再通过曲柄四连杆机构实现摆臂的开合。摆臂上挂载直线滑台模组,当摆臂和直线滑台模组一起工作时,除草铲可以实现空间立体开合运动,达到土下除草土上避苗的效果,即土上避苗除草模式。
当除草铲在整个除草过程中被水平放置,且由直线滑台模组始终将其置于最底端时,则除草铲工作期间始终处于地表以下,仅能实现平面开合运动,达到土下除草土下避苗的效果,即土下避苗除草模式。
2.1.3除草铲设计
由前期玉米田环境测量知,玉米根系在地表下20 mm处的辐射直径约为60 mm,并参照了周福君等[10]、陈子文等[25]提出的玉米苗保护区范围。如图6所示,本研究将除草铲单侧张开初始距离设计为30 mm,调节范围20~40 mm。此外,由于除草铲在作业过程中需要长期与土壤接触摩擦,因此在材料上选择耐磨性较好的45号钢并经表面热处理增强其硬度,厚度为2.5 mm,入土深度约20 mm。除草铲上有3个矩形孔,旨在通过减少土壤与除草铲之间的接触面积来减少二者间的阻力。
在除草铲的土下避苗除草模式下,由于只进行平面开合运动,故除草铲始终水平放置于地表下20 mm深度位置。在土上避苗除草模式下,除草铲倾斜向下放置,倾斜角由除草铲的水平和竖直方向运动速度的复合速度确定,其计算式为
(1)
(2)
(3)
vx=ωLb
(4)
式中d——相邻两棵玉米苗的平均距离,m
t——机器人平台经过株间的时间,s
v——机器人平均前进速度,m/s
vy——除草铲竖直方向平均速度,m/s
vx——除草铲水平方向平均速度,m/s
Ls——丝杠步进电机的单程距离,m
ω——摆臂转动的平均角速度,rad/s
Lb——摆臂的长度,m
α——除草铲倾斜放置角,(°)
2.2 视觉系统设计
2.2.1数据集制作
田间地面环境复杂,杂草形态丰富多样,一些杂草的形态和玉米苗有很大的相似之处。此外,田间的光照强度和自然风等外界因素变化多端。针对以上非结构化的田间复杂环境,制作一个好的田间苗草数据集需要考虑多种田间状况,所以图像采集工作特别重要。QUAN等[23]在采集玉米苗图像时,为了获得丰富的数据集,提出了3种田间状况,即:多角度、全周期、多天气,最终获得的玉米秧苗检测率高达97.71%。
本研究中,杂草和玉米苗图像采集地点为东北农业大学试验田,采集时间为2020年6月14日,采集时玉米苗处于3~5叶期。由于该除草机器人工作时,摄像头始终垂直于地面,所以在图像采集时也只设定了90°一个拍摄角,满足除草时所需的视角要求。此外,为了降低光照变化造成的影响,选取当天3个时间段进行采集:08:30—10:30、13:30—15:30、17:00—18:00,共采集图像800幅,分辨率为640像素×480像素。
如表2所示,通过对图像进行亮度、饱和度、噪声和模糊4种光度畸变以及翻转、缩放、平移3种几何畸变[26]的数据增强方法最终将苗草图像扩展到8 000幅。采用LabelImg标记软件制作PASCAL VOC 数据集格式的田间苗草数据集,其中70%为训练集,30%为验证集。

表2 数据增强后图像数量Tab.2 Number of images generated by data augmentation methods 幅
2.2.2检测网络训练
本试验需要实现在自然环境下对玉米苗和杂草2类目标的快速、精准检测,为了让视觉系统达到快速和鲁棒的检测效果[27],选用在速度和精度上表现较好的YOLO V4模型。YOLO V4的主干提取网络虽然深度多达53层,但通过引入CSP(Center and scale prediction)网络不但提高了卷积神经网络的学习能力,还加快了计算速度[28]。深度卷积神经网络能够自适应地学习目标特征,实现端到端的目标检测,并且能够检测各种动态环境下的目标[29]。
在玉米苗3~5叶期,图像中的杂草和玉米苗在尺寸上相差较大,故将输出张量26×26尺度去除,改为输出13×13和52×52 2种尺度的预测张量,其目的是提高整体模型的速度,使其能够更好地检测到玉米苗(大目标)和杂草(小目标)。基于YOLO V4的杂草和玉米苗检测流程[30]如图7所示。
由于杂草目标尺寸较小,为了提升检测精度,所以选择输入尺寸为416像素×416像素,初始学习率0.001,动量系数设置为0.9,分类数2,迭代次数20 000次。在所有参数中,根据数据集中的图像特点和GPU的表现,当批量尺寸设置为7时,训练效果更好。
训练集和验证集分别用来训练和检测YOLO V4检测模型。其训练模型基于验证集计算出的平均准确率随迭代次数的变化曲线如图8所示,可以看出平均准确率均值(mAP)稳定在93%,具有较优的检测性能。
2.2.3检测信息提取
当除草机器人系统在田间工作时,摄像头实时获取垄上的玉米和杂草图像并传给便携式计算机,使用计算机中的检测模型进行实时处理。当视觉检测系统没有检测到株间杂草,则不向控制系统发送除草指令。如图9所示,当视觉检测系统检测到株间有杂草时,首先通过玉米苗的绿色边框计算出其中心点坐标,并以提前设置好的保护区直径画圆作为作物的虚拟保护区。当杂草的黄色边框上边界与下一棵玉米苗保护区中心点距离L1和下边界与上一棵玉米苗的距离L2都满足除草条件时,则向控制系统发送除草指令和距离L1和L2,视觉系统检测流程如图10所示。
2.3 控制系统设计
2.3.1硬件选型
控制系统采用STM32F407单片机作为主控芯片,该单片机是由STMicroelectronic公司开发的32位微处理器,其内核为ARM的Cortex架构,I/O口众多,功能强大,满足本系统设计要求。角度传感器型号为ATK-MPU6050 V1.1,接口电压3.3 V/5 V DC,通信方式遵循标准IIC通信协议,通信频率400 kHz (Max)。
由上述整个除草系统的硬件配置可知:便携式计算机采用220 V AC供电;伺服电机和步进电机采用24 V供电;单片机采用5 V供电。本除草系统自身配备24 V锂电池,通过逆变器从机器人移动平台上的48 V电池获得220 V AC电源,通过降压模块从锂电池获得5 V电源,角度传感器直接从单片机上端子获得5 V电源。
2.3.2控制策略
如图11所示,在除草作业开始之前,伺服电机和步进电机首先进行初始化。控制系统接收到视觉系统传递的除草指令和苗草距离信息后,将距离信息L2编译为除草铲启动延时时间,将L1编译为除草铲闭合状态持续时间。
在机器人移动平台前进时,为了保证除草铲水平运动和竖直运动的同步性,控制系统应保证摆臂单向摆动时间等于除草铲竖直方向单程运动时间,满足
(5)
式中θ——摆臂摆动角,(°)
3 试验
3.1 田间试验环境
为了更方便统计除草铲对玉米根系的伤害情况,如图12所示,对地表下的根系进行大致测量为:地表下10 mm,根系辐射直径约为40 mm;地表下20 mm,根系辐射直径约为60 mm;地表下30 mm,根系辐射直径约为90 mm。
为了检验整个除草系统的可行性和稳定性,试制了样机,并在东北农业大学试验田进行株间除草试验,如图13所示。试验田种植方式为垄作,垄距为550~650 mm,株距为250~300 mm;地块面积约800 m2,长约40 m,宽约20 m;共计约5 200株玉米苗,处于3~5叶期。
3.2 视觉检测系统试验
视觉检测系统试验单独在田间进行,摄像头安装在机器人移动平台上,摄像头垂直于地面,高度与实际除草时保持一致。试验中采用的图像处理设备为便携式计算机,其配置为Intel i7 7500u 2.7 GHz处理器,GPU NVIDIA显卡GTX1060,16 GB内存,满足基本检测要求。
在试验中,机器人移动平台分别以速度1.0、1.2、1.5 km/h在试验田中行走,每种速度下完成3垄的图像检测并进行统计,统计结果如表3、4所示。
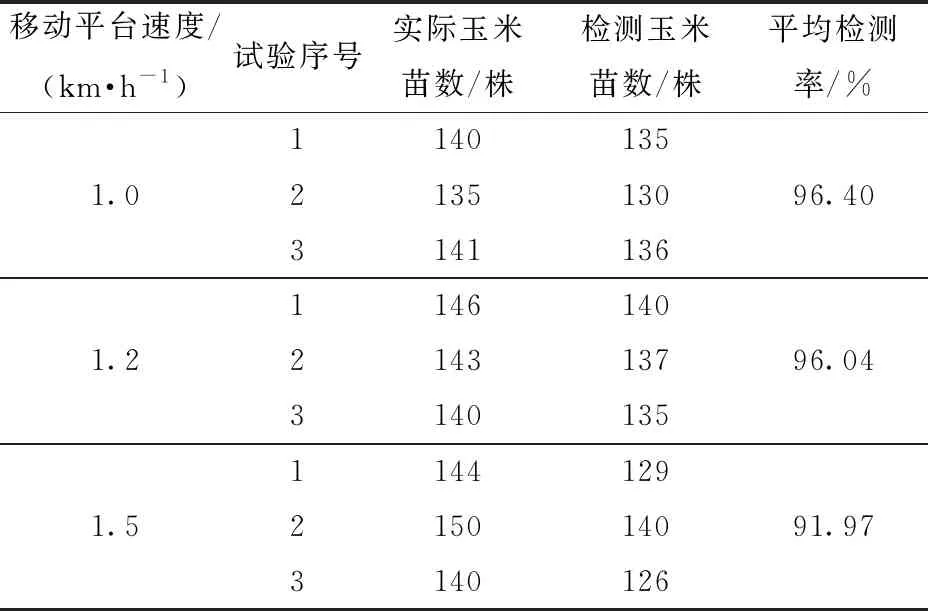
表3 玉米苗检测结果Tab.3 Detection results of maize seedlings
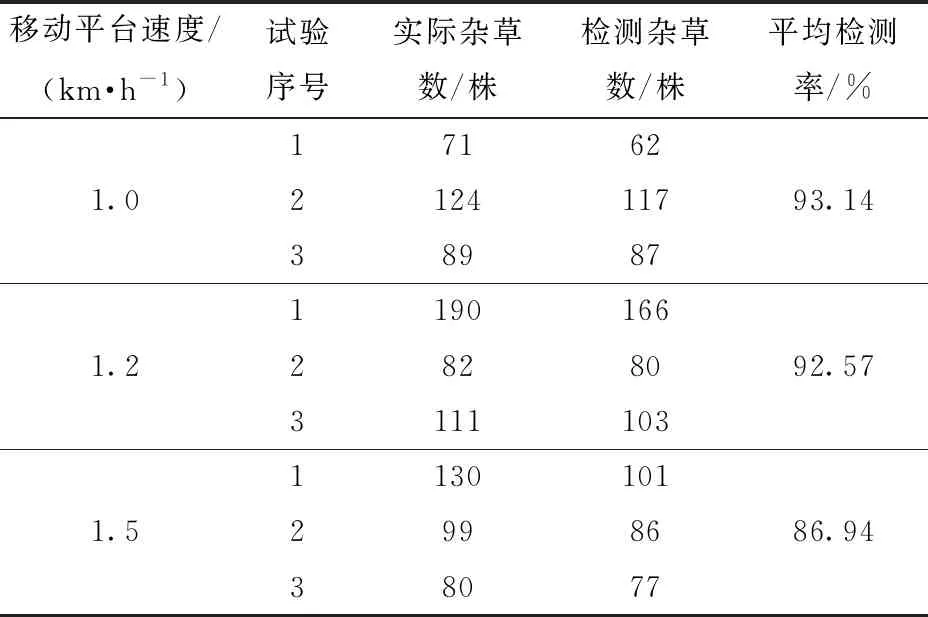
表4 杂草检测结果Tab.4 Detection results of weeds
移动平台在速度1.0 km/h下,玉米苗和杂草的平均检测率都最高,而在速度1.5 km/h下检测率有所下降。造成以上结果的原因可能是随着机器人移动平台速度的提高,摄像头采集到的图像质量下降,视觉系统实时检测能力下降,导致某些玉米苗和杂草被漏检。
由表3、4看出,玉米苗检测结果稳定,杂草检测结果发生轻微波动,通过查看检测过程中的录屏发现造成该结果的原因可能是在俯视的角度下,小尺寸杂草和玉米苗的叶子重叠[31],导致杂草只有局部被“看”到或者完全“看”不到,增加了检测难度。
3.3 除草试验
除草试验共分2种除草模式进行,第1种是除草铲土下避苗除草模式,即除草铲始终在垄台地表下20~30 mm的平面内进行开合运动;第2种是除草铲土上避苗除草模式,除草铲倾斜放置,与水平面呈约37°夹角,综合其水平和竖直方向运动实现空间立体开合运动。参照文献[5,7,16]对除草机器人作业速度设计标准,本研究设定在平台前进速度为1.2 km/h时,进行2种避苗除草模式试验,除草原则都是基于视觉系统检测到株间有杂草时才进行除草作业,否则不进行作业。
在每种除草模式下,基于玉米根系损伤最小化目的,田间试验按保护区直径共分为3组进行,直径分别设置为40、60、80 mm,每组试验分别进行3次取平均值,以此来检验除草装备的稳定性和除草、避苗以及根系保护的效果。每次试验后统计伤苗率、除草率和伤根率,并计算出平均除草率、平均伤苗率和平均伤根率。除草率和伤苗率统计结果如表5、6所示。由表5、6可知,平均除草率均高于81%,但随着保护区直径设计逐渐减小,株间可除草区域对应增大,可除杂草数量增多,除草能力增强,除草率增加。此外,玉米苗保护区减小,给除草系统避苗带来更大挑战,伤苗率也有所增加,且以上结果在2种模式下都有体现。
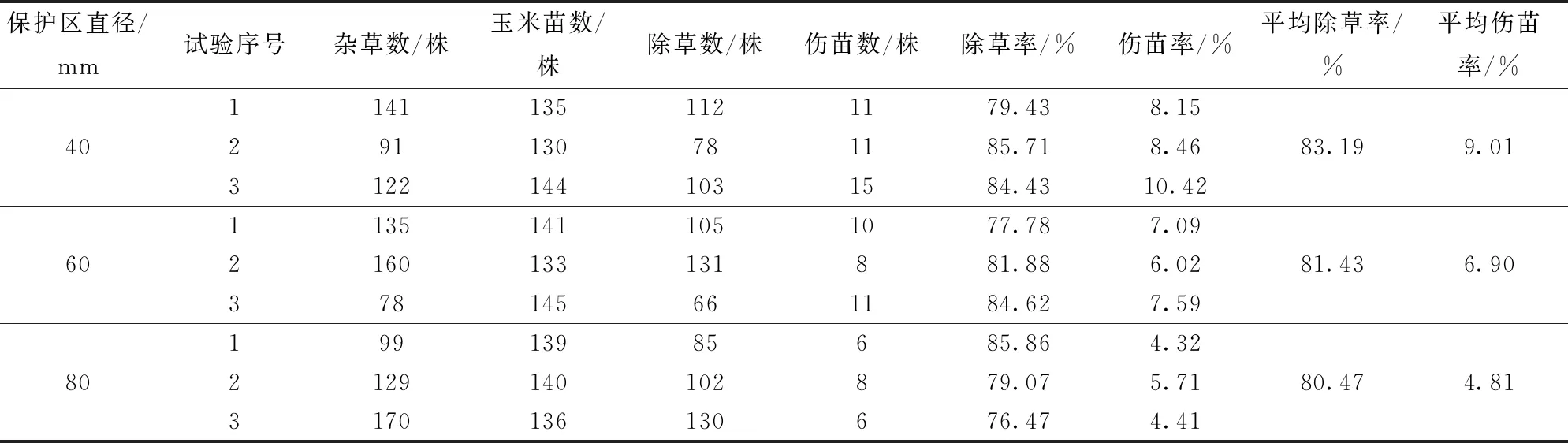
表5 土下避苗除草模式下的除草率、伤苗率统计Tab.5 Statistics of rate of weeding and maize seedlings injured under mode that weeding shovels were always placed under ground to avoid maize seedlings
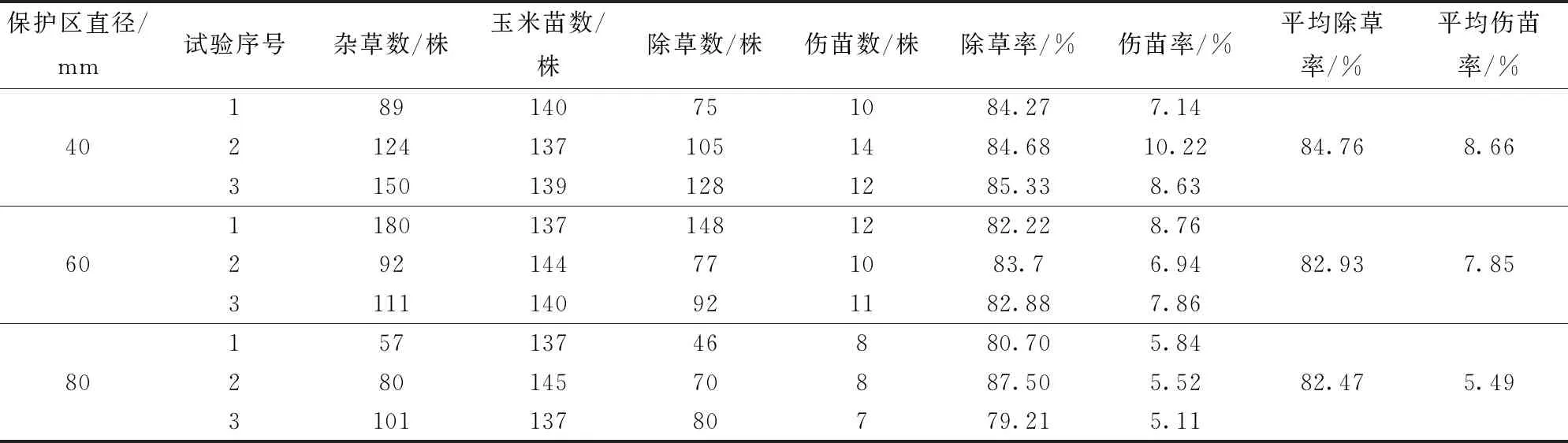
表6 土上避苗除草模式下的除草率、伤苗率统计Tab.6 Statistics of rate of weeding and maize seedlings injured under mode that weeding shovels were placed on ground to avoid maize seedlings
玉米苗伤根率对比如表7所示,2种模式下的伤根率相差很大,其中保护区直径在40 mm时对比最为明显,土上避苗除草模式减少了约50个百分点。造成这一明显现象的原因可能是当保护区直径设置偏小时,清除距离玉米苗较近的杂草会使得末端执行器进入作物根系受损的高风险区域,如图3红色方块区域所示。以上关于伤根率的结果显示,土上避苗除草模式平均伤根率为3.35%,相较于土下避苗除草模式降低了36.40个百分点,十分有利于降低玉米根系受损风险,充分发挥了保护作物根系的作用。
4 结论
(1)设计了包括视觉检测系统、控制系统和机械除草装置在内的株间除草机器人系统,可在3~5叶期的玉米田内进行株间除草。该系统运行稳定,可完成苗草识别、定位和除草等一系列工序。
(2)提出了一种基于除草铲空间立体运动的株间土上避苗除草模式。为实现该运动模式设计了除草装置,通过一个伺服电机和四杆机构完成除草铲水平运动,通过2个丝杠步进电机完成除草铲竖直方向运动,综合以上2个方向的运动控制除草铲完成空间立体运动。在该运动下,玉米苗保护区域变小,可除草区域增大,且除草铲避苗时处于地表以上,远离玉米苗根系。
(3)建立了基于YOLO V4模型的视觉系统来检测玉米苗和杂草,并通过修剪去除26像素×26像素尺度特征层,降低了单帧图像处理时间,提高了检测速度。在移动平台前进速度为1.2 km/h时玉米苗的检测率高达96.04%,杂草检测率高达92.57%,验证了苗草视觉检测系统的可行性。
(4)田间试验分别测试了土上避苗除草模式和土下避苗除草模式。在2种模式下,分别对比了不同玉米苗保护区直径下的除草率、伤苗率和伤根率。结果表明,在机器人移动平台前进速度为1.2 km/h时,除草率均高于81%,土上避苗除草模式的平均伤苗率和伤根率均低于土下避苗除草模式,其中伤根率为3.35%,平均降低了36.40个百分点,验证了土上避苗除草模式除草效果好,且具有较优的保护作物根系的性能。
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
现代园艺(2022年7期)2022-11-19
林业科技(2022年5期)2022-10-08
今日农业(2022年15期)2022-09-20
科教新报(2022年22期)2022-07-02
今日农业(2021年5期)2021-11-27
今日农业(2021年21期)2021-11-26
魅力中国(2020年23期)2020-12-08
湖北农业科学(2019年22期)2019-12-23
高中生学习·阅读与写作(2019年2期)2019-09-10