
机械加工中工装夹具的定位设计及其价值研究
2021-02-17 21:20陈佳杰
装备维修技术 2021年41期
关键词:机械加工
陈佳杰
摘 要:所谓工件定位,主要是使工件数据层与紧固件进行有效的接触,从而降低工件的整体自由度。本文综述了机械加工定位的分类及基本原理,并从分析定位工件,定位工件的作用,具体设计方法及辅助数据建立等方面对机械加工中工装夹具定位装置进行了阐述。
关键词:机械加工;工装夹具;定位设计
引言
在机械加工中,工装夹具的作用是不可替代的,这对机械加工质量会产生很大的影响,尤其是在工装夹具的定位设计中,其作用更是重要。通常情况下,在工装夹具的定位设计中,关键是要确定基准面与夹具定位元件的实际接触状态,主要包括粗基准和精基准,不同基准配合使用,可保证加工质量。
1机械加工定位基准的分类以及基本原理
1.1机械加工定位基准的分类
实际的机械制造过程中,线与面之间的关系主要表现为基准要素和几何要素。若以划分标准的观点讨论,则涉及设计和流程两部分。以下均为基于综合设计的参考模式,与中心线相对[1]。但实际选择定位基准时,相关人员还必须充分考虑工件的加工要求,以免条件分析不当,对后续加工造成严重影响。工件的线型、自由度都要根据自己的定位基准来选择,这是工件加工的关键。
1.2工件装夹与夹具设计的基本原理
1.2.1加工工艺的差异
在保证工件加工次序的同时,又能有效地控制装配成本,在实际紧固加工中,应遵循以下基本原则:首先要根据具体的加工类型,保证工件、夹具和设备之间的相互固定;其次要根据具体的加工类型,保证应用效果的整体优化;最后要从以上几个方面,考虑整个紧固加工的关系,加强各要素之间的协调。
1.2.2工件精度控制
正常工作时,该夹具能够有效地固定和定位工件,避免工件在加工过程中出现偏差,从而不利于工件的后续功能配置。所以,工件定位时,其精度是相应工作的主要目标。此外,对工件的定位要有明确的定位原则和规则;为了完成工件的设计质量,一般采用六度定位法(六自由度定位法)。工件在空间有六个自由度,包括前,后,左,右,上,下。在空间位移中,工件可以沿着这六个方向移动,约束工件也应该沿着这六个方向移动。但是,实际工作表明,限制工件的自由度,通常不会在六个方面都考虑到,否则容易造成过定位现象,因此必须结合具体加工工艺和实际加工情况,在不影响加工精度的前提下,才能达到工件的加工精度。
2机床加工工装夹具定位设计的有关内容
因工件类型不同,不同工件的加工过程也不相同。所以,在开始加工之前,必须先了解机床和刀具的位置。这时,工件夹操作是必不可少的,相关人员必须对此加以重视。
2.1工件定位分析
实际的工件定位过程,首先要掌握工件的基本精度,然后才能顺利加工。在实际的定位过程中,有三个相对位置:首先是工件和夹具的相对位置,其次是工件和机床的相对位置,最后是夹具和机床的相对位置。讨论工件与机床的相对位置时,必须用夹具支撑,否则容易影响工件精度[2]。
2.2六点定位法的应用
在不同的定位应用中,我们可以看到最常用的是六点定位法。如上文所述,工件包括,在工件未定位的情况下,工件本身包含6个自由度。
2.3机械加工自由度和力学自由度
机械加工自由与机械加工自由度之间有很大的差别。对于三维空间,加工自由度主要是控制空间的不安全状态,若能保持工件稳定,使其三维定位具有相同的特征,则必须有效地应用该定位方法,但这并不意味着工件的实际空间位置已经确定。其主要原因是工件的位置与夹具紧密相连。
2.4辅助基准设计
为提高工件表面的定位精度,有关人员经常集中精力于装配施工的基准,基准主要集中在工件的主面。但是在某些加工作业中,为了安装的方便,我能够建立一个以人为基准的基准。该方法还能提高基准加工水平,改善工件表面质量,保持定位工艺的合理性,这也是辅助基准的主要形式。整体而言,也正因为有辅助基准,才能保证工件的加工精度。
3工装夹具设计定位方法实例
工装夹具定位是整个加工过程的重要环节。定位技术是保证机械零件加工精度、提高生产效率和生产对象加工性能的关键技术。所以在施工和生产中,操作人员和设计人员必须严格控制工装夹具定位,熟悉场地设计原理,根据理论找出原因,及时解决问题。
3.1六点定位限制法
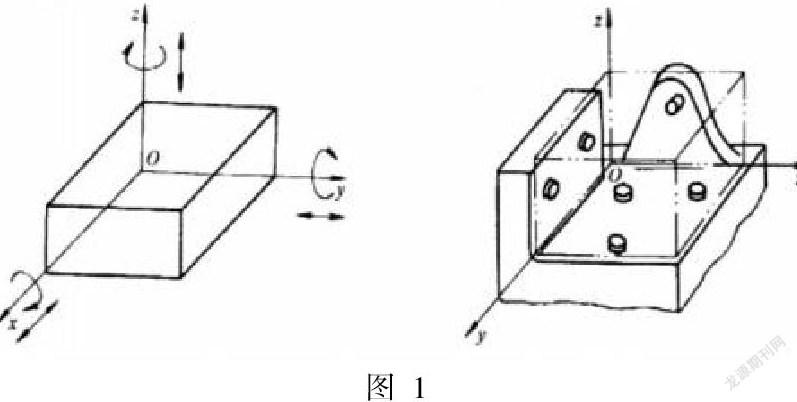
图1展示了一种常用的固定方法,即六点定位法,也叫多点定位法。先将待加工零件作为原始协调点,上、下、前、后、左、右六根射线,每根射线形成三轴,分别与 X射线和 y、 Z轴成比例。用科学、准确的方法选取六个点,利用加工设备及附件对加工零件进行锁定,锁定零件自由度,保证加工精度。
举例来说,在长40 cm、宽20 cm、高10 cm的长方体毛坯件上,我们需要加工直径为20 cm、高8 cm的圆柱体。经过限制后,在圆柱上切削2 cm,就可以得到所需要的工件。
3.2两点以上定位限制法
为了补充和改进六点位置限制法,在空间坐标系中,我们可以考虑采用两点以上位置限制法,一般情况下,日期的设定不超过六个。这两个位置还有不同之处,需要操作者注意。
4工装夹具定位的设计发展方向
4.1设计标准化定位方法
在机械化大规模生产模式下,加工产品的生产方向是与标准化相联系的,并将逐步与同类工业产品相结合,形成统一标准。为实现标准化标准件的大规模生产,需要统一的加工设备,统一的加工原料,统一的化工设备。该系统将提供一套标准的基本定位方法,适用于大部分机械零件,以方便形成流程化的加工工艺和大面积的生产方式,从而降低机械生产成本,提高利润。
4.2设计更数字化的定位方法
可想而知,隨着社会对各种机械产品的要求越来越高,以及数字化生产对产品精度和机械设备的要求越来越高,更严格、更精确的生产规则将适用于整个生产线。与现有的工装夹具调整法相比,固定定位法作为工艺技术的重要组成部分,其定位精度必然提高。
4.3定位设计方法的超前化
随着高端技术的不断发展,上、下产业链对机械产品品种和精度的要求进一步提高,使得生产难度不断增加。同时,日新月异的生产设备和高标准的生产工艺也在逐渐更新,新加工材料的强度和难度都在不断增加,给夹具定位法在加工过程中的固定提出了挑战。所以我们在以后设计新的夹具定位方法时,不但要解决紧急产品所要解决的问题,而且要培养发展新的夹具定位方法的意识,这种方法可用于设备、材料加工和生产中尚未出现或未出现的情况。
4.4设计更为方便的定位方法
按照以往的生产模式,每条生产线只能生产一种产品。生产线的调整和更新、生产线的改造、生产线的调整要花很多精力,而且要花很多时间去调整设备的位置。甚至在生产中,专业操作人员也要时刻注意变化,这是极其不利的。今后的工装夹具发展方向应是:使用方便、发展舒适、减少训练难度、减少工作流程、增加舒适、操作人员易于在流水线上直接处理、多批生产、创造较少的时间链、提高产品质量、增加经济效益。
4.5柔性化
为了满足不同工艺的要求,包括工艺特性、生产成本、工件形状和尺寸等工艺变量,需要采用可靠的调整方法和组合方法,以适应当前的技术水平,需要扩展夹具的灵活性,将附着体的特定距离转换成可移动的结构,提高夹具结构的适应性。
结语
总之,随着我国机械产品数字化程度的不断提高和生产加工技术的快速发展,各行业对机械产品的功能性、精确度和精确度等方面的要求也越来越高。运动矢量定位原理和空间坐标几何定位方法在目前有其优越性。对中国加工工业的高质量和高效率起到了决定性的作用,是中国加工工业发展的保证。但是,我们不能把目光停留在已经提出的问题上。加工行业要走在国际和国内的前列,就需要我们更多地投入到設备的先进研究和设备的定位方法上,不断地学习、改进和创新工装夹具,不断地分析和纠正定位方法设计过程中出现的问题,通过实验和实施,改善和改变这个过程中的缺陷,利用国外的知识、思想和技术,使工装夹具定位成为中国加工行业的完美帮手。
参考文献
[1]王川中.试论机械加工中的工装夹具定位设计[J].写真地理,2021,(6):90.
[2]王君艳.试论机械加工中的工装夹具定位设计[J].内燃机与配件,2020,(21):85-86.
猜你喜欢
科技研究·理论版(2022年4期)2022-07-15
名城绘(2019年6期)2019-10-21
环球市场(2018年4期)2018-09-10
农家科技(2017年10期)2018-01-09
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年15期)2016-11-24
