基于中线模型的隔离开关状态检测方法研究
2021-02-23 10:02公多虎詹仲强葛志杰吴天博陈文涛陈大鹏
宁夏电力 2021年6期
公多虎, 詹仲强, 葛志杰,吴天博,陈文涛,陈大鹏
(1.国网新疆电力有限公司电力科学研究院,新疆 乌鲁木齐 830000;2.南京优能特电力科技发展有限公司,江苏 南京 210000)
0 引 言
由于敞开式隔离开关所处的恶劣环境,在长期运转后会出现分合不到位的情况,倒闸操作过程中可能导致左右刀闸臂之间产生电弧,造成火灾,以致威胁设备及人身安全。目前变电站倒闸操作过程中,隔离开关状态主要根据现场运行人员现场观察进行识别,识别结果依赖运行人员经验及位置和天气情况等,存在检测结果不可靠的问题[1],不能满足实际需求。文献[2]中提出检测刀闸臂边缘线,根据刀闸臂边缘线的角度判断刀闸状态,但是在进行边缘检测时,刀闸臂附近往往会检测到多条边缘线[3-4]。如何精确确定左右刀闸臂边缘线直接影响状态检测精度[5-6]。本文提出一种基于中线模型的对开式隔离开关开合角度计算方法,利用对开式刀闸的运动特征和对称性,确定左右刀闸臂边缘线,精确计算左右刀闸臂间角度[7],根据夹角实现对开式刀闸开合状态自动检测。
1 隔离开关中线模型
1.1 基本特征
对开式隔离开关是水平断口、双柱水平旋转式隔离开关,双柱指左右两侧竖直的绝缘子,中心断口指左右刀闸臂在虚合或闭合状态时的接触位置。该类隔离开关在开合过程中左右刀闸臂以绝缘子上端点为旋转点,左右刀闸臂同步对称开合。图1为对开式隔离开关,隔离开关装配如图2所示。

图1 对开式隔离开关
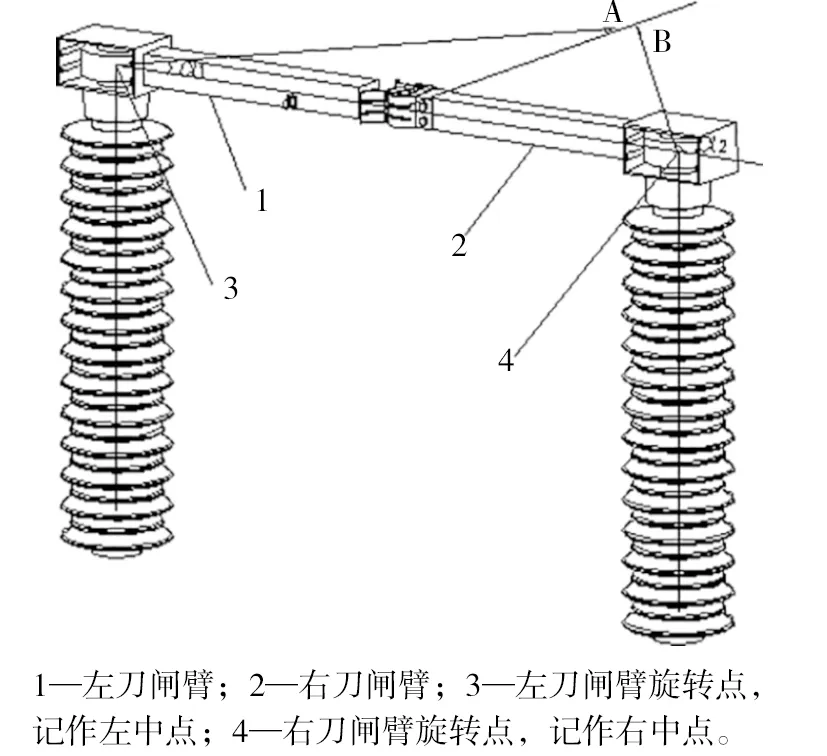
图2 左右刀闸臂边缘线配对
1.2 刀闸臂中线的定义
对开式隔离开关完全闭合时,左右刀闸臂在同一直线上,左右中点连线的中点记作刀闸臂中点;对开式隔离开关完全打开时,左右刀闸臂在三维空间中是相互平行的。在射影几何中,两条平行的直线相交于无穷远处一点,该点投影到图像平面称作消失点(灭点),将刀闸臂中点和消失点的连线记作刀闸臂中线。
1.3 刀闸臂中线的性质
1)刀闸臂中线垂直于闭合状态下左右刀闸臂所在直线,且过刀闸臂中点。
2)在刀闸开合过程中,任意状态下左右刀闸臂所在的直线,其延长线的交点在刀闸臂中线上。
3)在刀闸开合过程中,左右刀闸臂对称的任一点的运动轨迹的切线的交点在刀闸臂中线上。
1.3.1 证明(a)
由图3可以看出,设刀闸臂中点为C,左中点为L1,右中点为R1,左右刀闸臂完全打开时的消失点为V,L1L2为完全打开的左刀闸臂,R1R2为完全打开的右刀闸臂,则有

图3 刀闸臂简化
L1L2∥R1R2
又由通过同一无穷远点的所有直线平行,故
L1L2∥CV
CV⊥L1R1
可以看出,刀闸臂中线垂直于闭合状态下左右刀闸臂所在直线,且过刀闸臂中点。
1.3.2 证明(b)
对于开合过程中任意状态下的左右刀闸臂,L1L3和R1R3分别表示任意状态下的左刀闸臂线段和右刀闸臂线段(见图3)。由于对开式刀闸左右刀闸臂是对称同步开合,故有
∠L3L1C=∠R3R1C
延长L1L3和R1R3相交于点D,三角形L1DR1为等腰三角形,因为C为底边L1R1的中点,所以CD为三角形L1DR1底边的中线,既等腰三角形的底边中线和底边的高互相重合,有
CD⊥L1R1
可以看出CD和刀闸臂中线为同一直线,左右刀闸臂边缘线的延长线的交点D在刀闸臂中线上,当刀闸在开合过程中,任意状态下左右刀闸臂所在的直线,其延长线的交点在刀闸臂中线上。
1.3.3 证明(c)
在刀闸开合过程中,左刀闸臂任一点的运动轨迹是以左中点为圆心,固定长度为半径的圆上的一部分圆弧;右刀闸臂任一点的运动轨迹是以右中点为圆心,固定长度为半径的圆上的一部分圆弧。设定左右刀闸臂任意对称的两个点为P1和Q1,在刀闸由合到开的过程中,左刀闸臂上的点P1的运动轨迹上的另外两个点为P2和P3,右刀闸臂上的点Q1的运动轨迹上的另外两个点为Q2和Q3,则P3和Q3关于中线对称,所以P3Q3的连线的中点在中线上,记作F。由于L1和R1关于中线对称,P3和Q3也关于中线对称,刀闸臂中线垂直于P3Q3,同时垂直于L1R1,所以
L1R1//P3Q3
又M和N在L1R1上,所以
MN//P3Q3
∠MP3Q3=∠NQ3P3
∠EP3Q3=∠EQ3P3
三角形EP3Q3为等腰三角形,又F为P3Q3的连线的中点,所以EF为等腰三角形EP3Q3的底边中线。等腰三角形的底边中线和底边的高互相重合,所以EF⊥P3Q3。刀闸臂中线过点F且垂直于P3Q3,EF和刀闸臂中线在同一直线上,点E为刀闸臂中线上的点,所以在刀闸开合过程中,左右刀闸臂对称的任一点的运动轨迹的切线的交点在刀闸臂中线上。
2 确定隔离开关开合状态
采集开式隔离开关图像,利用LSD(line segment detector)边缘检测算法获取目标图像中刀闸臂所有边缘线,由上述证明可知,在刀闸开合过程中,任意状态下的左右刀闸臂所在直线的交点均在刀闸臂中线上,所以刀闸臂中线将刀闸一分为二,左刀闸臂位于刀闸臂中线左侧,右刀闸臂位于刀闸臂中线右侧,左右刀闸臂边缘线延长线的交点在刀闸臂中线上,因此可利用刀闸臂中线确定左刀闸臂边缘线和右刀闸臂边缘线。
获取左右刀闸臂边缘线后,以左刀闸臂边缘线和右刀闸臂边缘线作为基准,设定左刀闸臂边缘线相对于闭合状态刀闸臂所在直线的角度为α1,右刀闸臂边缘线相对于闭合状态刀闸臂所在直线的角度为α2,左刀闸臂边缘线和右刀闸臂边缘线间的夹角为θ=|α2-α1|,该夹角即为左刀闸臂和右刀闸臂间的夹角,实际使用时根据用户需求利用刀闸臂间的夹角判断刀闸开合状态。
3 实验结果与分析
实验中,根据隔离开关技术条件要求,将左右刀闸臂间的角度<3°的刀闸状态判定为闭合状态,将左右刀闸臂间的角度≥3°<15°的刀闸状态判定为虚合状态,而将左右刀闸臂间的角度>15°的刀闸状态判定为打开状态,实验结果中包含左右中点连线、左右刀闸臂定位矩形框、左右刀闸臂的边缘线、左右刀闸臂间的角度以及刀闸的开合状态。图4为刀闸闭合状态的检测结果,从图中可以看出左右刀闸臂基本在同一直线上,计算得到左右刀闸臂间的角度为0.93°。图5为刀闸虚合状态的检测结果,计算得到的左右刀闸臂间的角度为9.78°。图6为刀闸打开状态的检测结果,计算得到的左右刀闸臂间的角度大于15°。图7中检测到的刀闸臂间的夹角为2.61°,刀闸状态判断为闭合。图8中检测到的刀闸臂间的夹角为1.13°,刀闸状态判断为闭合。图9中检测到的刀闸臂间的夹角为0.77°,隔离开关状态判断为闭合。

图4 闭合状态检测结果
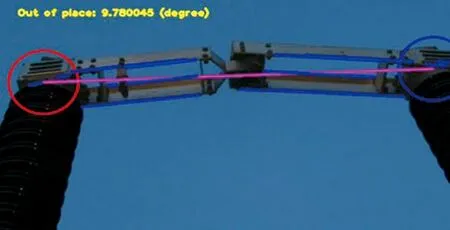
图5 虚合状态检测结果
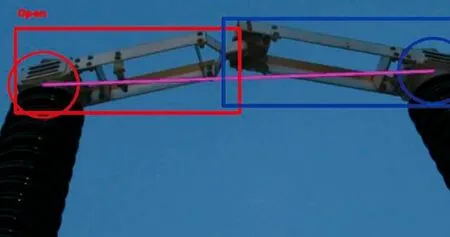
图6 打开状态检测结果
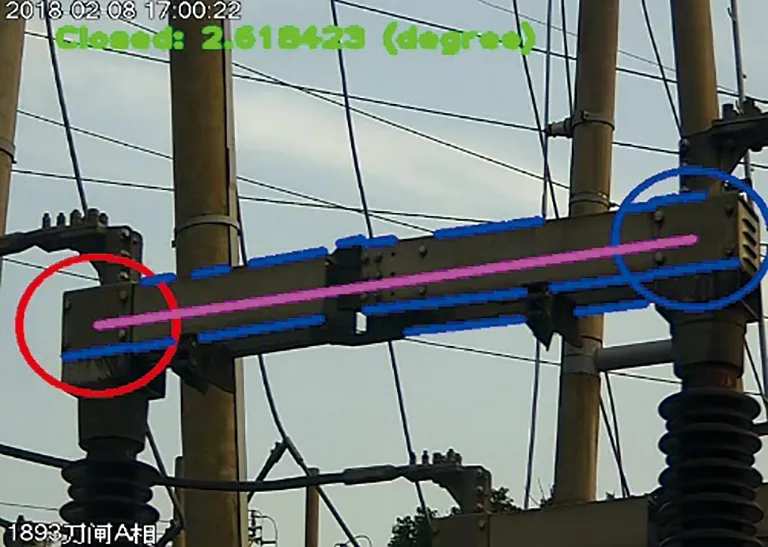
图7 闭合状态检测结果
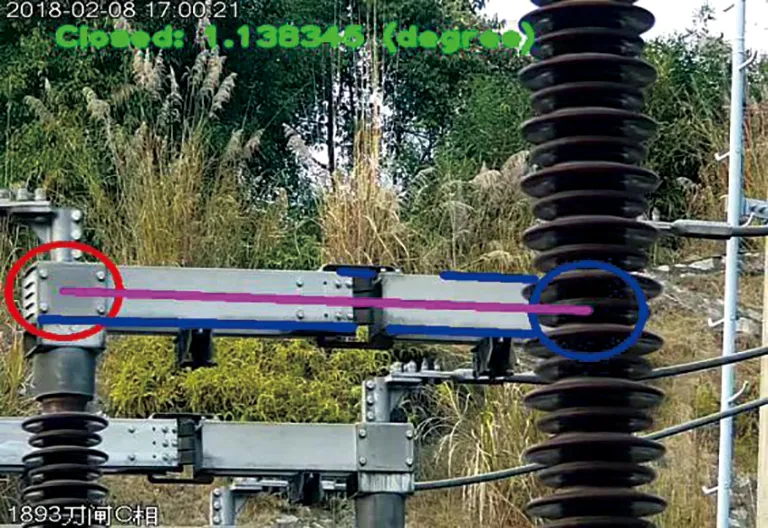
图8 闭合状态检测结果
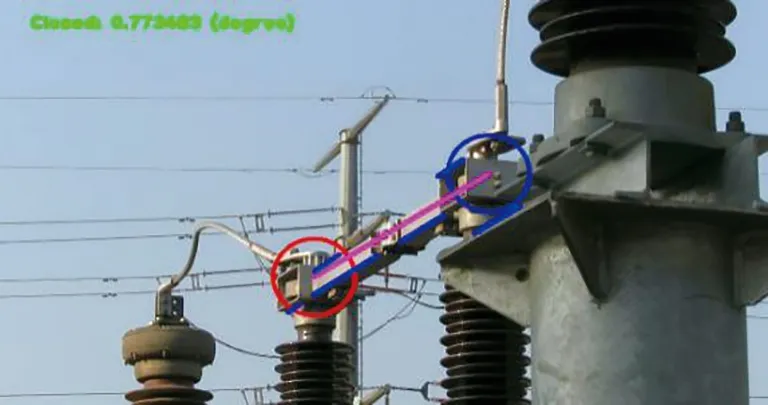
图9 闭合状态检测结果
4 结 论
本文提出一种对开式隔离开关的中线模型状态检测方法,刀闸臂中线垂直于闭合状态下左右刀闸臂所在直线,且过刀闸臂中点,在刀闸开合过程中,任意状态下左右刀闸臂所在直线的延长线的交点在刀闸臂中线上,左右刀闸臂对称的任一点的运动轨迹的切线的交点在刀闸臂中线上,利用中线可帮助精确确定左右刀闸臂边缘线,再计算刀闸臂间角度,根据角度判断刀闸开合状态。从实验结果可以看出,本文提出的方法充分利用了刀闸本身的特征和运动特性,提出的中线方法可以帮助精确确定左右刀闸臂边缘线,提高刀闸状态识别精度。
猜你喜欢
无线互联科技(2022年16期)2022-11-11
节能与环保(2022年3期)2022-04-26
通信电源技术(2021年6期)2021-07-17
中国电气工程学报(2020年10期)2020-11-06
机电信息(2020年21期)2020-10-21
魅力中国(2020年18期)2020-08-25
设计(2020年24期)2020-01-25
中国电气工程学报(2019年14期)2019-10-21
学生天地·小学低年级版(2018年9期)2018-12-03
——书写要点(三)
学生天地(2018年33期)2018-11-08