利用两棱镜测量方法提高测量成果精度在盾构施工自动导向中的应用
2021-02-23 12:29钱美刚
建筑施工 2021年11期
钱美刚
上海市基础工程集团有限公司 上海 200002
随着近些年来盾构设备制造业的飞速发展,现阶段几乎所有盾构机供货服务商,均能够给予采购方一站式服务,其中就包括了盾构机自动导向系统服务。目前市场上主流的盾构自动导向系统,主要分为激光法自动导向系统和棱镜法自动导向系统,这2种不同原理的自动导向系统在盾构施工中均得到了大量的运用,并获得了广大用户的认可。而随着盾构施工工艺的不断完善和提升,以及测绘技术和测绘装备的不断发展与更新,施工人员对盾构自动导向系统的测量成果精度以及测量成果的稳定性提出了更高的要求[1-4]。
本文将结合工程实例,详细阐述一种棱镜法自动导向系统通过改变常规两棱镜测量方法的方式,获取盾构机实时姿态。通过成果数据对比分析,说明此法能够有效稳定地提升盾构机实时姿态的精度以及成果的稳定性,满足施工人员对盾构实时姿态高精度及高稳定性的要求,顺应了测绘技术及测绘装备发展和更新的潮流。
1 两棱镜测量方法实现方案
1.1 两棱镜安装位置设计
常见的棱镜法自动导向系统是在盾构机壳体内部安装3个目标棱镜:前端设置2个目标棱镜,后端设置1个目标棱镜。实时姿态的实现,是通过测量3个目标棱镜中任意2个目标棱镜的三维坐标,并结合各个目标棱镜与盾构机相对独立的关系,以及盾构机的实时姿态角,计算盾构机切口及其盾尾的三维坐标,并将其归算至设计轴线上,获取盾构机实时的切口(盾尾)里程、平面偏离值和高程偏离值,指导盾构机按设计轴线掘进。
通过对大量盾构施工测量实践的分析发现,安装于后端的目标棱镜,由于下方是吊运衬砌环的吊装设备,在衬砌环吊运的过程中,安装于后端的目标棱镜始终处于一个变化的状态(即与盾构机相对关系不够固定),如果安装于后端的目标棱镜参与了最终的计算,获取的最终姿态成果,必然存在一定的误差。
盾构机壳体前端的2个目标棱镜通常都是安装于盾构机的加强环部位,安装于此部位的2个前端目标棱镜,均稳定牢固。在非人为移动的情况下,其与盾构机相对关系固定,满足棱镜法自动导向系统对目标棱镜安装的位置要求。
综上所述,采用棱镜法导向原理获取盾构机实时姿态,并通过改变两棱镜常规的测量方法可实现提高盾构自动导向精度的目标。2个目标棱镜均安装至盾构机加强环的部位,取消盾尾后端的目标棱镜。为方便目标棱镜的安装与拆卸,以及重复使用及经济的目的,棱镜选用L形棱镜(图1)。
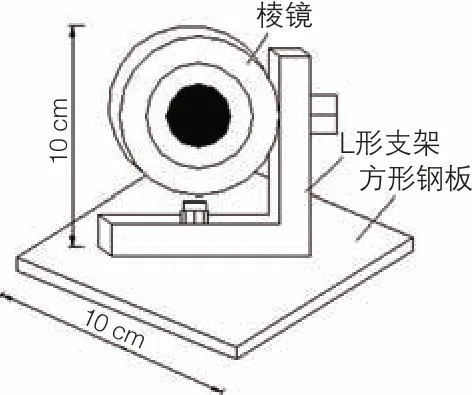
图1 L形棱镜示意
1.2 两棱镜测量方法设计
两棱镜测量方法的设计为本自动导向系统设计的核心,其测量方法设计直接关系到最终的成果数据精度是否得到有效提高。
常见的棱镜法自动导向系统,都是通过测量3个目标棱镜中的任意2个,从而获取盾构实时姿态,上文已提到,如果测量了后端不稳定的目标,会给测量成果带来一定的误差;而如果只通过测量安装于前端的2个稳定的目标棱镜,理论上,其获取的成果精度高于前者。但实际施工中,我们更多的是要获取盾构机的实时姿态,而盾构机实时处于一个运动的状态,从而导致2个目标棱镜在采集数据时并不同步,采集到的数据不是在同一状态下的数据成果,这将直接造成获取的盾构实时姿态成果存在一定的误差。因而如何消除或降低2个目标棱镜因获取的数据不同步而造成的实时姿态成果误差,将是两棱镜测量方法设计的重点。
为有效控制上述误差,在本次设计中,拟通过对其中1个目标棱镜进行双观测,通过双观测值进行线性内插,获取双观测目标中间时段的测量成果数据,与另一个目标棱镜采集到的数据一起参与最终的实时姿态计算。
安装于前端的2个目标棱镜,分别编号为1号和2号,盾构掘进时,2个目标棱镜均处于运动状态。自动测量开启后,先测量1号目标棱镜,获取1号目标棱镜数据,再测量2号目标棱镜,获取2号目标棱镜数据,再次测量1号目标棱镜,第2次获取1号目标棱镜数据,这样1号目标棱镜就有了2个测量成果数据,将这2次测量成果数据进行线性内插,获取2次测量成果中间时段的数据。由于盾构机的掘进基本上为匀速掘进,采用这样的测量方法,通过线性内插获得的1号目标棱镜数据和2号目标棱镜数据基本为同一状态的数据,有效提高了盾构实时姿态的成果数据。
2 两棱镜测量方法自动化实现方案
两棱镜测量方法自动化的实现主要是在原自动导向系统的基础上,进行功能和性能上的改进和提升。
2.1 自动导向系统主要构成
1)操作电脑:自动导向系统操作电脑为常规使用笔记本电脑或工业电脑,用于软件的安装以及数据的存储等,对电脑操作系统无特殊要求,均为常规Windows操作系统。
2)自动导向系统软件:软件为自动导向系统的核心,用于自动导向系统指令的下达、数据的收集、数据的处理、成果可视化等(图2、图3),利用VB语言进行设计开发。

图2 软件界面

图3 相关参数设置界面
3)通信装置:通信装置采用无线电台模式,通信模块分中心模块和次级模块。中心模块和次级模块分别采用RS232串口与操作电脑和测量仪器连接(图4)。

图4 通信模块
4)具备自动搜寻及精确照准目标棱镜的智能型全站仪;用于目标间关系的测量,如:水平角、垂直角、斜距等。
5)双轴传感器:安装于盾构机内部,用于采集盾构机的实时姿态角,即旋转角和仰俯角。
6)其他相关设备:如 Y 线,用于智能型全站仪与次级模块的连接;目标棱镜,用于数据采集的测量目标;相关电源设备,为操作电脑、仪器、模块等提供电源。
2.2 两棱镜自动导向系统原理概述
1)通信连接测试与数据库的建立将中心模块通过数据线与操作电脑连接,智能型全站仪通过 Y 线与次级模块连接,并提供电源。
连接完成,在操作电脑上打开安装完成的自动导向系统软件,在软件内部完成数据库的建立。数据库主要用于计划的输入,以及测量信息的存储等。
数据库建立完成后,在软件内完成相关参数的设置,包括通信参数设置,如端口设置、通信方式设置等。然后进行目标棱镜参数设置,设置目标棱镜与盾构机相对独立的关系,以及综合设置,如测站点和后视点的三维坐标,盾构与区间分界里程、测量间隔时长等。相关参数设置完成后,通过软件操作,进行通信测试。通信测试失败则可根据软件自动诊断提示,进行相关的操作,直至通信测试成功。
2)两棱镜自动导向原理的本质是通过导线的传递,获取2个目标棱镜的三维坐标,并结合2个目标棱镜与盾构机的相对独立关系,以及盾构机的实时姿态角,解算获取盾构机切口(盾尾)的三维坐标,并将其归算至设计轴线上,获取盾构机的实时姿态。
智能全站仪架设于隧道顶部的吊篮上,大致对准后视目标,软件内点击设站按钮,由智能型全站仪精确搜寻后视目标,并进行测量,完成测站定向。
定向完成后,点击测量按钮,由智能全站仪自动搜寻安装于盾构机内的2个目标棱镜并完成测量,测量顺序为1号→2号→1号。1号目标棱镜测量成果取值根据第1次和第2次测量完成时间进行线性内插,得到两次中间时段成果数据作为最终取值,并与2号目标棱镜成果一同参与最终的实时姿态成果计算。
计算完成后将盾构机的实时姿态显示于自动导向软件界面,指导施工人员对盾构机姿态进行纠偏,按设计轴线开挖,直至最终的顺利贯通。
3 工程实践应用
3.1 工程概况
江浦路越江隧道新建工程江中段盾构区间分东、西双线,西线隧道起始里程为WK1+426.00,终止里程为WK0+645.00,全长781.00 m;东线隧道起始里程为EK1+431.524,终止里程为EK0+646.36,全长785.17 m;隧道最大坡度5.00%,最小平面曲率半径为600 m;隧道中设置联络通道1座。
隧道施工采用2台盾构机先后从浦东工作井出洞,穿越浦东防汛墙、黄浦江、浦西防汛墙后,到达浦西工作井进洞,东线隧道掘进采用φ11 580 mm小松泥水平衡盾构机,西线隧道掘进采用φ11 630 mm铁建重工泥水平衡盾构机(图5)。

图5 隧道平面示意
3.2 工程实践中的应用及成果
江浦路越江隧道新建工程江中段盾构区间工程,有2个显著的特点,一是盾构开挖直径较大,二是设计坡度较大。经工程实践证明,盾构掘进过程中,如果不能有效地消除或削弱目标棱镜测量不同步所带来的误差,不仅会对盾构机实时姿态产生影响,还会造成盾构机实时姿态的不稳定,产生实时姿态跳动的情况,从而可能会给工程施工人员造成误导,不利于工程质量的控制。
在本工程实施过程中,在掘进速度为3 cm和5 cm的工况下,分别采用了常规的两棱镜测量模式、新设计的两棱镜测量模式以及人工测量检核这3种方法对盾构机实时姿态进行测量。
经多次实践证明,在新设计的两棱镜测量模式下获取的盾构机实时姿态,同时满足了有效提高测量精度和成果数据稳定的要求。
但在对不同工况下获取的实时盾构姿态成果数据进行对比分析时发现,常规的两棱镜测量模式获取的实时盾构姿态数据与新设计的两棱镜测量模式获取的实时盾构姿态数据以及人工检核的姿态成果数据相比,还是存在一定的误差,且与盾构机掘进速度成正比。而新设计的两棱镜测量模式获取的实时盾构姿态数据与通过人工检核获取的盾构姿态数据相差较小,且在不同的工况下,成果差值相对稳定。通过工程实践证明新设计的两棱镜模式测量方法有效地提高了测量成果精度,且测量成果具有较高的稳定性。
4 结语
在江浦路越江隧道新建工程江中段盾构区间工程建设过程中以及东、西线盾构掘进过程中,均采用了新设计的两棱镜模式的测量方法对盾构机进行实时导向。实时获取的盾构姿态,经多次检核,测量成果稳定,通过1号→2号→1号这种改进的测量方法,有效地提高了测量成果精度,满足施工人员对测量成果高精度及稳定性的要求。
实时盾构姿态测量成果精度控制的提高,对指导盾构掘进及成形隧道线形控制都具有积极的作用和意义,因而新设计的两棱镜模式测量的方法具有可推广的实际运用价值。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
电测与仪表(2016年16期)2016-04-12
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
印制电路信息(2015年6期)2015-12-30
物理实验(2015年8期)2015-02-28
振动、测试与诊断(2014年6期)2014-03-01