
某中空长航时无人机机载浮标分离安全性研究
2021-03-02 12:15孙凯军付义伟陆冬平陈著汪洋
航空工程进展 2021年1期
孙凯军,付义伟,陆冬平,陈著,汪洋
(1.中国航天空气动力技术研究院 彩虹无人机科技有限公司, 北京 100074) (2.中国电子科技集团有限公司 中国电子科学研究院, 北京 100043)
0 引 言
近年来,随着我国海洋事业的迅猛发展,海难事故和海域领土纠纷也频发。与有人驾驶飞机相比,中高空长航时无人机具有航时长、成本低、出勤率高等优点,其搭载先进完善的搜索与通信浮标使其成为远海救援、侦察监视的中坚力量。因此,研究无人机机载浮标投放过程中的气动力干扰问题,对机载浮标安全投放方案的设计有着十分重要的意义。
机载外挂物动态分离的研究方法主要有风洞试验和数值计算两种。风洞试验方面,主要有捕获轨迹系统(Captive Trajectory System,简称CTS)试验,其是现阶段模拟飞机外挂物投放分离的主流试验方法,该方法能比较真实地模拟外挂物的分离特性,但是该方法对试验环境要求高、试验设备复杂,并且费用昂贵。数值计算方面,针对具有较大相对位移的运动问题,目前比较成熟的方法主要是动态嵌套网格方法,其具有较高的网格质量,并且考虑了流场的非定常效应。
国外,W.L.Sickles等利用数值方法计算了B-1B轰炸机炸弹投放的运动轨迹,数值模拟结果与飞行试验吻合良好,证明了CFD方法的有效性;F.Robert等利用CFD方法结合六自由度刚体运动方程成功预测了F/A-18C战斗机机载导弹的运动轨迹,计算结果与风洞试验结果一致,说明CFD方法可以有效预测导弹的运动轨迹。
国内,达兴亚等结合预估校正机制和嵌套网格技术对导弹的虚拟飞行进行了数值模拟,其数值结果与试验值吻合良好;王巍通过动网格技术模拟了导弹的分离运动,给出了导弹安全分离的条件;郭少杰等、蒋胜矩等、白治宁等结合动态嵌套网格与刚体六自由度运动方程,分别模拟了内埋导弹、弹丸和反潜导弹分离舱的分离过程,得出较为可靠的数值模拟结果。
通过国内外研究现状可以看出,通过非定常数值模拟与刚体六自由度运动方程相结合的方法可以模拟机载武器的投放过程,但是现有研究主要集中在机载导弹的分离安全性分析方面,且主要体现在有人驾驶飞机上,对轻质、无动力载荷的分离安全性研究较少,尤其对螺旋桨后推式无人机的载荷分离安全性研究鲜有报道。
综上所述,本文通过非结构动态嵌套网格技术模拟浮标运动,结合刚体六自由度运动方程求解三维非定常N-S方程,模拟大侧风环境下某中高空长航时无人机机载浮标的动态分离过程,并根据数值模拟结果对浮标投放位置和方式进行适应性改进。
1 数值模拟方法
1.1 控制方程
在惯性笛卡尔坐标系下,对于任意控制单元,积分形式的三维雷诺平均N-S方程可以写成如下守恒形式:

(1)
式中:=(ρ
,ρu
,ρv
,ρw
,ρe
)为守恒变量;∂V
为某一固定区域V
的边界;为边界的外法向矢量;为对流矢通量;为粘性矢通量。1.2 刚体六自由度动力学方程
计算采用两个坐标系来描述浮标运动过程,一个是与无人机固联的惯性坐标系,另一个是与浮标固联的非惯性坐标系,坐标原点位于浮标质心。非惯性坐标系随浮标在惯性坐标系中作六自由度运动。这两个坐标系的坐标变换关系为

(2)
式中:下标B表示非惯性坐标系;下标I表示惯性坐标系;为两个坐标系的坐标转换矩阵。刚体质心运动方程为

(3)
式中:m
为刚体质量;为惯性坐标系下刚体质心的速度矢量;为刚体受力总矢量。将式(3)转换到非惯性系下:

(4)
刚体质心动力学方程为

(5)
式中:为刚体上的力矩总矢量;为刚体对质心的动量矩。将式(5)转换到非惯性系下:

(6)
1.3 动态嵌套网格
无人机和浮标分离的过程中具有较大的相对位移,故数值计算必须采用动网格技术,而运动嵌套网格技术在模拟复杂非定常流动中具有比较明显的优势,因此本文对机载浮标分离的数值模拟采用非结构动态嵌套网格技术。
1.4 动态数值模拟原理
数值方法主要是基于非定常N-S方程和非结构动态嵌套网格,并结合刚体六自由度动力学方程的联立求解。动态数值模拟是在定常流场数值模拟基础上重复进行初值不同的求解。具体动态求解步骤如下:
(1) 建立计算模型,嵌套网格划分;
(2) 求解定常流场作为非定常计算的初始值;
(3) 开始非定常求解,计算T
时刻浮标所受合力和合力矩;(4) 通过求解刚体六自由度动力学方程得到浮标的运动规律;
(5) 由第(4)步得到的计算结果,求解T
+ΔT
时刻浮标的位置及姿态信息,更新浮标所在位置;(6) 求解T
+ΔT
时刻的非定常流场,返回第(4)步,如此循环,即可数值模拟浮标投放的运动轨迹。2 算例分析
采用美国空军实验室的标模来验证本文所采用的数值模拟程序的准确性,该标模具有完整的CTS试验数据。模型的几何外形如图1(a)所示,机翼和导弹的具体尺寸参见文献[15];计算网格示意图如图1(b)所示。

(a) 几何外形

(b) 局部网格
为了防止导弹发射初始阶段撞到发射架,在发射架下方增加弹射力:弹射力1作用点距弹头1.237 m,方向朝下,大小10 679 N;弹射力2作用点距弹头1.747 m,方向朝下,大小42 717 N。弹射力持续0.05 s后消失。
导弹基本参数:质量907.2 kg,其重心距弹头1.417 m,惯量I
=27.12 kg·m,I
=488.1 kg·m,I
=488.1 kg·m,I
=I
=I
=0。计算状态:飞行高度H
=7 925 m,Ma
=0.95,攻角0°,侧滑角0°。导弹的运动轨迹、线速度与实验数据的对比如图2所示。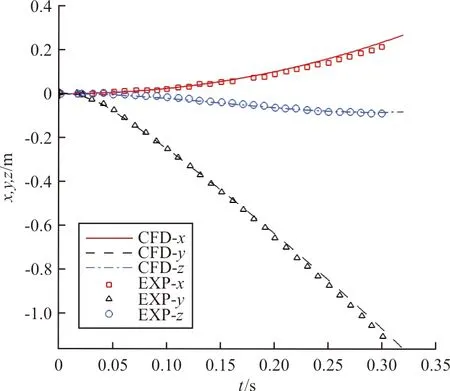
(a) 质心运动轨迹与实验值对比

(b) 质心运动线速度与实验值对比

(c) 导弹运动轨迹正视图

(d) 导弹运动轨迹侧视图
从图2可以看出:计算结果与实验结果吻合良好,表明本文采用的数值模拟程序计算精度较高,可以用来模拟无人机载荷分离过程。
3 浮标投放分离模拟
3.1 几何模型
飞机模型为某中高空长航时无人机,属于螺旋桨后推式无人机,翼展21 m(如图3所示),本文计算不涉及螺旋桨滑流。浮标投放舱如图4所示,浮标为长圆柱型(如图5(左)所示),浮标从投放舱弹出以后浮标口盖(如图5(右)所示)第一时间脱落,浮标口盖将一小型降落伞从浮标内部带出(如图6所示)。

图3 某中高空长航时无人机

图4 浮标投放舱

图5 浮标及浮标口盖
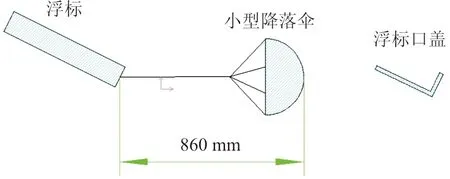
图6 浮标开伞示意图
计算状态:飞行高度H
=0.5 km,水平风速56 m/s,攻角0°,最大侧风15 m/s(相当于侧滑角15°,根据飞行力学仿真得到)。3.2 浮标口盖分离模拟
由于浮标口盖质量较轻,受侧风影响较大;并且口盖处于浮标底部,在浮标没有完全出筒的情况下已经从浮标上分离。因此,口盖对飞机的安全性,尤其是对螺旋桨的安全性可能会造成影响。
首先模拟口盖的分离轨迹,浮标口盖的质量为0.18 kg,转动惯量分别为0.001,0.002和0.004 kg·m。假定浮标盖板初始位置包含两种情况:口盖背部朝上(如图7所示)和口盖背部朝内(如图8所示),初速度为0 m/s。
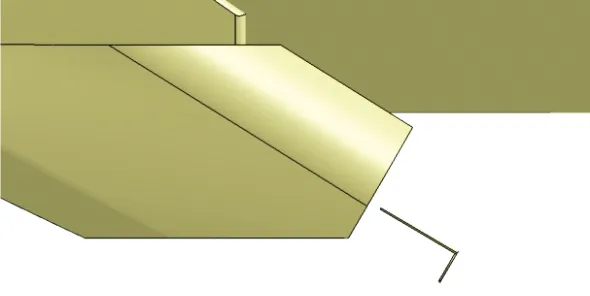
图7 浮标口盖初始位置一:背部朝上(侧视图)
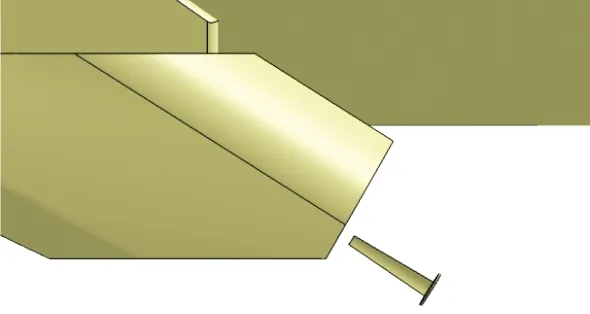
图8 浮标口盖初始位置二:背部朝内(侧视图)
飞机表面网格示意图如图9所示,嵌套网格示意图如图10所示。浮标口盖由位置一(背部朝上)分离的数值仿真结果如图11所示。

图9 飞机表面网格示意图

图10 嵌套网格示意图

(a) 侧视图

(b) 后视图
从图11可以看出:浮标口盖自由投放0.28 s后,水平位移很大,纵向位移次之,侧向位移较小;整个投放过程中浮标口盖俯仰方向发生滚转,没有横航向滚转。投放过程中,如果无人机是稳定的,则可以认为浮标口盖投放是安全的。
浮标口盖由位置二(背部朝内)分离的数值仿真结果如图12所示,可以看出:浮标口盖自投放0.16 s后,侧向位移明显比水平、纵向位移大得多,浮标压板移动到机身右侧。

(a) 侧视图

(b) 后视图
虽然在初始位置一和初始位置二的计算中浮标口盖没有碰到螺旋桨,但是计算发现口盖初始位置会对其运动轨迹产生很大影响,如果初始位置不合理,口盖很有可能会飘进螺旋桨滑流区,进而击中螺旋桨,对飞机的飞行安全产生严重影响。
3.3 改进后浮标分离模拟
从3.2节的仿真结果可知,浮标口盖自由分离会对无人机螺旋桨的安全性造成影响,故经考虑,决定把浮标口盖固定在降落伞上,固定绳长度为600 mm,如图13所示,同时将浮标投放舱由机翼最内侧挂点移动到最外侧挂点。

图13 浮标开伞示意图(改进后)
浮标参数如表1所示,投放初速度分别为0和1.8 m/s,降落伞拉力为风洞试验结果。为了简化问题,本节只模拟浮标运动,同时假设浮标初始位置降落伞已经完全打开,在整个投放运动过程中降落伞拉力大小、方向恒定,作用点在浮标底部。

表1 浮标参数
3.3.1 无初速度投放
无初速度时,浮标0.48 s内的运动轨迹如图14所示,可以看出:水平位移明显比纵向、侧向位移大得多。
无初速度时,浮标运动过程中各参数随时间的变化曲线如图15所示,可以看出:降落伞拉力较气动力、重力要大得多,浮标在运动初期俯仰角变化剧烈,由初始的30°变成-36.4°,但是纵向位移较小;在运动中后期,浮标俯仰角又逐渐变大,直到0.48 s时刻俯仰角为28.2°。

(a) 侧视图

(b) 正视图

(a) 浮标三分量力(含重力和伞拉力)

(b) 浮标质心位置
浮标底部与浮标口盖总长度为1.749 m,通过计算得到浮标运动过程中与螺旋桨平面的最小距离为1.9 m,极端情况下浮标口盖与螺旋桨平面的最小距离约为0.151 m。考虑到飞机沉浮运动,需要留有0.5 m的安全余量,故0 m/s初速度投放不满足投放要求。
3.3.2 有初速度投放
V
=1.8 m/s时,浮标0.48 s内的运动轨迹如图16所示,可以看出:水平位移同样明显比纵向、侧向位移大得多。V
=1.8 m/s时,浮标运动过程中各参数随时间变化的曲线如图17所示,可以看出:浮标有1.8 m/s的初速度后,在运动初期俯仰角由30°变成-30.2°,这段时间内纵向位移比无初速度投放要大得多;在运动中后期,浮标俯仰角又逐渐变大,但是幅值较小,直到0.48 s时刻俯仰角为-9.8°。
(a) 侧视图

(b) 正视图

(a) 浮标三分量力(含重力和伞拉力)

(b) 浮标质心位置
浮标底部与浮标口盖总长度为1.749 m,通过计算得到浮标运动过程中与螺旋桨平面的最小距离为2.42 m,极端情况下浮标口盖与螺旋桨平面的最小距离约为0.671 m。考虑到飞机沉浮运动,需要留有0.5 m的安全余量,故1.8 m/s初速度投放满足投放要求,可以认为在极限情况下也是安全的。
4 结 论
(1) 动态嵌套网格方法可以用于处理螺旋桨后推式无人机轻质载荷分离问题,具有较高的工程应用价值。
(2) 轻质浮标口盖自由分离状态的数值模拟结果显示,口盖初始位置会对其运动轨迹产生很大影响,其自由分离会对飞机的安全性造成重大影响。
(3) 改进后浮标的投放安全性和其初始投放速度有很大的关系,应在总体设计时予以考虑。
猜你喜欢
垂钓(2022年1期)2022-02-09
垂钓(2021年5期)2021-05-31
初中生学习指导·提升版(2020年6期)2020-09-10
垂钓(2019年9期)2019-09-10
垂钓(2019年2期)2019-09-10
新高考·高一物理(2018年1期)2018-11-23
金融经济(2017年7期)2017-07-15
理科考试研究·高中(2017年2期)2017-04-08
大众理财顾问(2016年9期)2016-10-11
考试周刊(2016年72期)2016-09-20
