基于PLC智能清洁小车控制系统的设计
2021-03-08 10:14孟昭超张恒张学迪周东近李俊东
科学与财富 2021年4期
孟昭超 张恒 张学迪 周东近 李俊东


摘 要:中大型企业随着自动化水平不断提高,厂房及生产面积不断扩大,清洁工作由清洁人员操作大型机器来完成。本文通过对PLC控制清洁车实现无人化操作,大大提升提高清洁的效率和质量。
关键词:智能清洁小车;PLC;麦克纳姆轮
1引言:
随着科技和社会不断进步,许多大型自动化生产企业崛地而起。大型企业在发展的同时,而清洁问题伴随而来,由于清洁不当对企业发展造成了一定的影响,有时还带来了安全隐患。对于大面积需要清扫的地面如广场、货站、转运平台,人工打扫起来即费时又费力。尤其是一些环境恶劣场所,如高温,高湿,高辐射、高危险等场合会对人体健康造成一定影响,所有清洁工作变得十分困难,本文设计一款基于PLC智能清洁小车来解决此问题。
2智能清洁小车工作原理:
基于工作环境的复杂性,本设计用PLC作为核心控制,结合麦克纳姆轮的特点,利用多个电机的正反转配合控制,实现清洁小车的平移、原地转向、前进后退、左移右移等功能,结合清洁装置实现全厂区无死角清洁。麦克纳姆轮是一种可全方位移动的全向轮,由轮毂和围绕轮毂的辊子组成,麦轮辊子轴线和轮毂轴线夹角成45°。在轮毂的轮缘上斜向分布着许多小轮子,故可以横向滑移。由四个这种轮加以组合,可以使机构实现全方位移动功能。结合外部传感器实现场合有向运动,实现清洁有序工作。
3智能清洁小车控制系统设计方案
3.1控制系统整体结构图
由图3.1可知当工作人员通过摄像采集到需要清洁的区域后通过控制遥控器给PLC发送信号,PLC接收到信号后控制电动机工作,通过红外光电开关和磁感应传感器控制调节整机的位置和清洁装置的位置。通过控制小车的行走以及清洁系统的调节实现清洁工作。
3.2控制系统原理图
由上图可知该设备采用PLC作为核心控制由24个输入信号,它们分别是启动开关、停止开关、急停开关、左臂上升、下降开关、右臂上升、下降开关、计米开关、左前限位、左后限位、右前限位、右后限位、左侧限位、右侧限位、计米传感、左升限位、左降限位、右升限位、右降限位、前进后退选择开关、左移右移开关、左旋转右旋转开关,限位开关主要用于保障小车的安全,防止小车越过界限产生碰撞,实现智能清洁小车自动工作,开关用于控制整个机器的动作以及完成小车的工作。
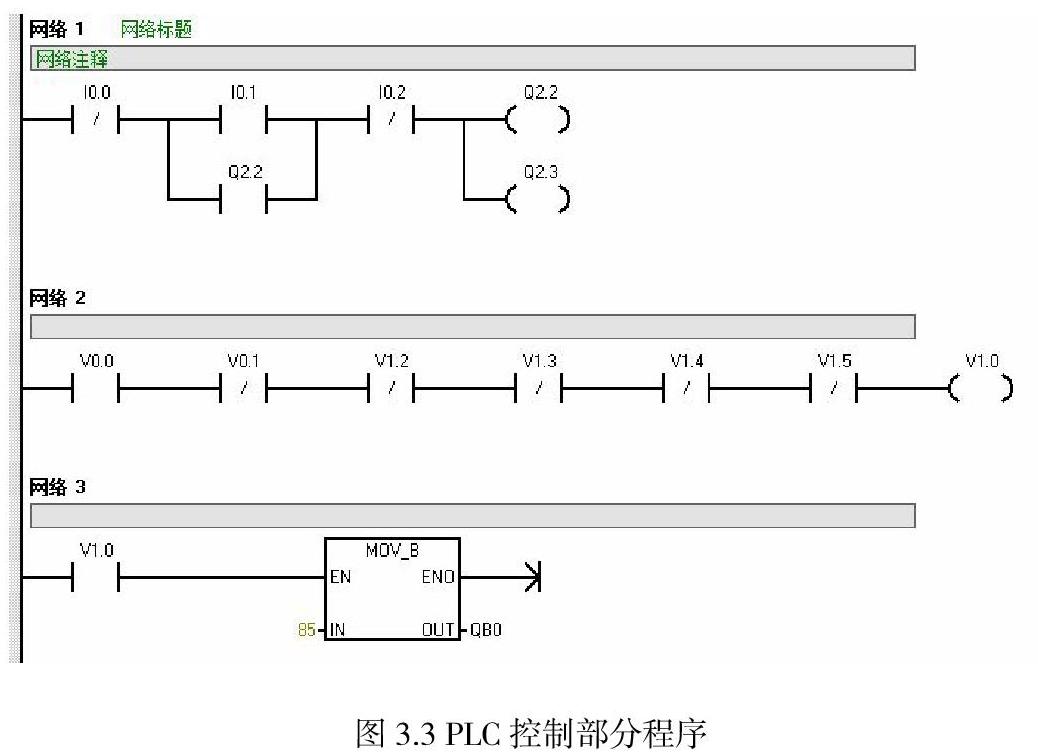
3.3程序设计及过程
本文采用S7-200编程工具软件。可用梯型图、指令表编程且,具有程序编辑、相关参数值设置、网络设置、监控、仿真调试、在线修改程序等功能,可以在PLC人机交互界面实现修改与运动执行器之间进行共享。
3.4智能清洁小车的功能及优点
智能清洁小车可应用于室内外大面积清洁作业,也可应用于高危场所。采用PLC来控制多控制小车内部的多个装置实现多种功能,如小车行走并拍摄,杀毒功能,吸尘器以及洒水等功能。综合考虑到运行场所的多样性和复杂性,智能清洁小车外形小巧。本智能清洁小车采用PLC标准模块,实现功能可靠、抗干扰能力强,工作环境相对恶劣,成功实现自动化工作。
4结语
智能清洁小车采用PLC控制多个电机实现智能、高效、全自动化清洁目的,同时采用麦克纳姆轮实现了无死角的清洁工作,即节省了人力資源,又提高了清洁工作效率与质量。
参考文献:
[1]廖常初.PLC编程及应用第4版[M]北京:机械工业出版社,2014.
[2]代卫东.饮料设备工程中实施监理的重点和管理技术[J].山东工业技术,2015(17):80-80.
指导老师:颜安 赵祖玉