
基于CAM矩阵的水下机器人容错控制方法
2021-03-10 07:37万亚民杨管金子
水下无人系统学报 2021年1期
邱 帅, 吕 瑞, 范 辉, 万亚民, 黄 海, 杨管金子
基于CAM矩阵的水下机器人容错控制方法
邱 帅, 吕 瑞, 范 辉, 万亚民, 黄 海, 杨管金子
(中国船舶集团有限公司 第705研究所, 陕西 西安, 710077)
针对水下机器人推进器出现故障后控制效果变差, 无法完成指定任务, 甚至可能造成机器人的丢失等问题, 文中提出一种基于控制分配机(CAM)矩阵的水下机器人容错控制方法。利用CAM矩阵重构推力分配确保机器人航行稳定, 同时使用序列二次规划方法寻找最大合力推力分配策略实现效率最大。通过仿真对所提方法进行有效性验证, 结果表明, 该容错控制方法能够处理推进器部分或完全失效故障并使机器人保持一定的性能稳定航行。
水下机器人; 推力分配; 容错控制; 重构
0 引言
占地表面积70%以上的海洋蕴含着丰富的矿产和生物等资源[1]。随着科学技术的发展和对海洋研究的不断深入, 作为能够在深海环境下工作的水下机器人, 在海洋开发中发挥着越来越重要的作用[2]。
水下机器人工作条件恶劣, 周围环境复杂多变, 在实际工作过程中, 一旦出现故障, 轻则无法完成预定作业任务, 重则危及载体自身安全甚至无法回收, 带来巨大的损失。容错控制技术的出现, 为提高复杂系统的可靠性开辟了一条崭新的途径。
推进器系统作为水下机器人的重要组成部分, 直接与海水接触, 极易出现运行故障, 出现故障后的推进器, 其产生的推力达不到预定值, 严重情况下完全无法产生推力, 从而导致水下机器人无法按照指令行进。因此, 对水下机器人推进器系统的容错控制就显得格外重要。文献[3]~[5]使用加权伪逆求得推进器出现故障情况下的推力分配最小范数解, 可以实现水下稳定控制。文献[6]~[12]使用滑模容错控制器根据推进器故障调整控制器的输出以实现容错控制。文献[13]~[16]等使用神经网络进行故障辨识, 调整控制参数保证运动控制系统的稳定性。此外, 文献[17]将容错控制与动态控制器设计解耦, 并在控制分配过程中以分配误差最小和控制成本最小为优化目标, 采用非线性规划来解决容错控制问题。文献[18]将推进器故障视作一种干扰, 设计出一种自抗扰控制器(active disturbance rejection controller, ADRC), 并使用动态自适应算法来优化控制参数, 取得了良好的控制性能。上述文献的容错控制方法仅能保证在推进器出现故障后稳定航行, 但没有考虑到航行的效率问题。针对此, 文中考虑出现故障后各个推进器实际所能产生推力大小, 使用序列二次规划法寻找最大合推力, 以推力最大利用为目的进行推力重构, 保证机器人能够按指令实现稳定控制的同时, 在能力范围内可以实现推力最大以及航行效率最优。
1 研究对象描述
1.1 推进器布局
常见的水下机器人大都具有4个水平推进器, 用于水平面内的3个自由度(纵荡、横荡、艏摇)运动。选用Kaxan水下机器人[19]为研究对象, 其推进器布局如图1所示。

图1 Kaxan推进器布局示意图

表1 Kaxan推进器安装角度及位置参数
1.2 水下机器人动力学模型
根据国际拖曳水池会议(international towing tank conference, ITTC)推荐的和美国造船与轮机工程学会(the society of naval architects and marine engineers, SNAME)术语公报的体系, 同时参考相关文献, 建立如下2种右手坐标系。
水下机器人在惯性坐标系下的六自由度空间动力学模型可以表示为


2 容错控制设计
2.1 推力分配方法
参考Yuh等[20]提出的运动控制体系结构, 设计文中所用到的水下机器人基础运动控制体系结构, 如图2所示。规划系统根据需求生成相应的期望位姿, 控制器将水下机器人的期望位姿与基于传感器测量得到的当前位姿进行比较来计算期望的力和力矩。

图2 水下机器人运动控制系统
推力分配在控制中的作用如图3所示, 使用推力分配方法计算提供所需力和转矩时每个推进器要提供的推力大小。将推进器所提供的推力整合为6个自由度上的力和力矩, 并将其作为水下机器人模型的输入值进行计算。
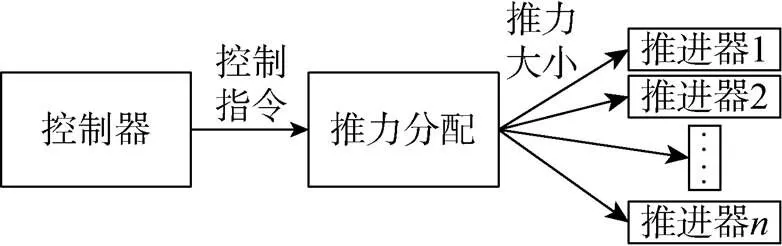
图3 推力分配在控制中的作用
其中, 推进器故障检测部分通过监视推进器汲取电流变化来检测推进器故障, 结合故障情况, 进行推理分配重构。在不深入研究推进器故障如何检测的情况下, 假设可以在推进器发生故障时对其进行检测[6]。
文中采用基于控制分配机(control allocation machine, CAM)矩阵的推力分配方法。CAM是一种适用于包含多个控制执行机构的水下机器人高效控制力分配方法。CAM将每个推进器的控制指令的执行结果与其对6个自由度的贡献联系起来, 给予分配一定的贡献系数。且针对每个推进器的每个自由度控制指令都可形成一个与水下机器人6个自由度相关的贡献系数向量。当控制器对水下机器人下达各自由度控制指令时, 将水下机器人各自由度需求指令组成的向量与每个推进器自由度对应的贡献系数向量做内积, 结果即为推进器在此自由度方向上的控制指令。


由各个推进器的贡献系数向量组成的贡献系数矩阵为

自由度需求指令向量可以表示为

8个推进器的推力向量表示为

其中

由此完成推力分配。
2.2 容错控制方法
推进器故障引起的失效包括2种情况: 一是推动能力减弱, 即局部失效, 此时推进器还能继续工作, 只是由于不太严重的故障导致最大转速降低; 二是推进器完全失效, 此时只能依赖于其他驱动器继续工作。
通过各个推进器的故障状态(推进器电机转速高低和电流大小), 可以得到其工作状态权值, 继而重构CAM, 在推进器部分失效或完全失效情况下实现稳定控制。
各个推进器的实际推力用工作状态权值与最大推力的乘积表示



主要约束条件有:
力矩平衡约束

推进器实际推力大小约束



根据图4所示推进器布局配置情况, 有


图4 水平推进器布局示意图
将式(14)代入式(13), 得到




图5 T1完全失效时合力F随W2、W3的变化曲面
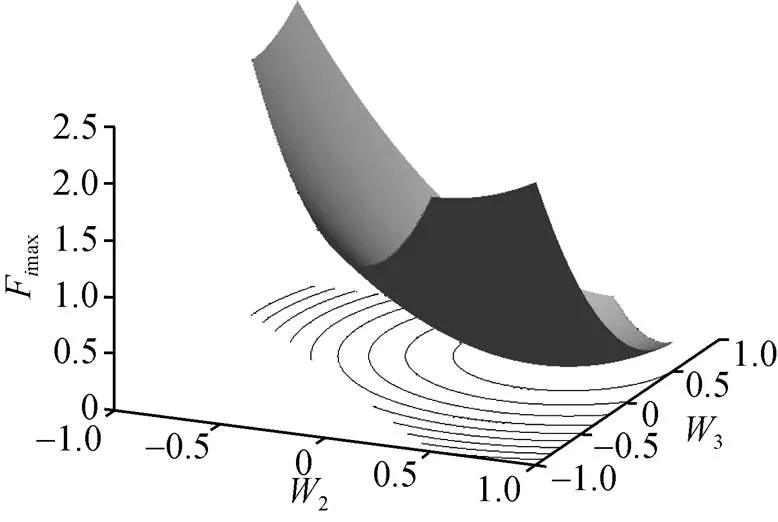
图6 T1部分失效时合力F随W2、W3的变化曲面
用得到的权值更新到权值对角矩阵, 权值对角矩阵乘以CAM矩阵得到新的推力分配矩阵, 即可实现推力分配重构。
3 仿真验证
由于CAM矩阵可以提供六自由度的控制指令, 当某一推进器出现故障后, CAM矩阵将其视作一种干扰, 进行稳定控制。但这种未经过调整的原始CAM矩阵没有考虑各个推进器推力的合力大小, 而经过上节所述重构后的CAM矩阵能够使推进器产生更大的推力合力, 使得水下机器人行驶效率更高。
在MATLAB/Simulink环境下, 选用1.2节中水下机器人数学模型, 结合CAM矩阵控制方法, 进行仿真试验, 验证所提容错控制方法的可行性和有效性。仿真结构图如图7所示。

图7 系统仿真结构图

图8 纵向速度(W1=0)

图9 纵向位移(W1=0)

图10 横向位移(W1=0)

图11 垂向位移(W1=0)

图12 纵向速度(W2=0.5)

图13 纵向位移(W2=0.5)

图14 横向位移(W2=0.5)

图15 垂向位移(W2=0.5)
4 结束语
以Kaxan水下机器人为研究对象, 针对水下机器人推进器出现的故障问题, 提出了一种基于CAM矩阵和序列二次规划的推进器推力重构容错控制方法。该方法通过重构CAM矩阵在推进器出现故障的情况下进行推力再分配, 实现了推进器推力的最大利用。分析仿真结果可知所提容错控制方法在水下机器人运动控制中是可行的, 容错控制策略能够满足实际需求, 且相对于未重构的CAM控制能够明显提升航行效率, 具有一定的实际意义。文中对推进器冗余配置的水下机器人容错控制进行了初步研究, 今后还需开展对于多个推进器出现故障的容错控制研究。
[1] 刘维新. 水下机器人推进器弱故障检测与预测方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.
[2] 陈小龙. 自主式水下机器人容错控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2009.
[3] Corradini M L, Cristofaro A. A Nonlinear Fault-tolerant Thruster Allocation Architecture for Underwater Remotely Operated Vehicles[J]. IFAC-Papers on Line, 2016, 49(23): 285-290.
[4] Podder T K, Sarkar N. Fault-tolerant Control of an Autonomous Underwater Vehicle under Thruster Redundancy[J]. Robotics and Autonomous Systems, 2001, 34(1): 39-52.
[5] Omerdic E, Roberts G. Thruster Fault Diagnosis and Accommodation for Open-frame Underwater Vehicles[J]. Control Rngineering Practice, 2004, 12(12): 1575-1598.
[6] 袁芳, 朱大奇, 叶银忠. 基于降阶卡尔曼滤波器的水下机器人滑模容错控制[J]. 控制与决策, 2011, 26(7): 1031-1035.Yuan Fang, Zhu da-qi, Ye Yin-zhong. Sliding-mode Fault-tolerant Control Method of Underwater Vehicle Based on Reduced-order Kalman Filter[J]. Control and Decision, 2011, 26(7): 1031-1035.
[7] Liu X, Zhang M, Wang Y, et al. Design and Experimental Validation of an Adaptive Sliding Mode Observer-based Fault-tolerant Control for Underwater Vehicles[J]. IEEE Transactions on Control Systems Technology, 2019, 27(6): 2655-2662.
[8] Soylu S, Buckham B J, Podhorodeski R P. A Chattering-free Sliding-mode Controller for Underwater Vehicles with Fault-tolerant Infinity-norm Thrust Allocation[J]. Ocean Engineering, 2008, 35(16): 1647-1659.
[9] Xu R, Tang G, Huang D, et al. Adaptive Fault-tolerant Attitude Control for a CMG-based Underwater Vehicle[J]. Journal of Marine Science and Technology, 2019, 25(3): 1-8.
[10] Li B, Dong W, Xiong C. Robust Actuator-fault-tolerant Control System Based on Sliding-mode Observer for Thrust-vectoring Aircrafts[J]. Asian Journal of Control, 2019, 21(1): 236-247.
[11] Guo B, Chen Y. Adaptive Fast Sliding Mode Fault Tolerant Control Integrated with Disturbance Observer for Spacecraft Attitude Stabilization System[J]. ISA Transactions, 2019, 94: 1-9.
[12] Zhu D, Liu Q, Hu Z. Fault-tolerant Control Algorithm of the Manned Submarine with Multi-thruster Based on Quantum-behaved Particle Swarm Optimisation[J]. International Journal of Control, 2011, 84(11): 1817-1829.
[13] 褚振忠, 朱大奇. 基于自适应区域跟踪的自主式水下机器人容错控制[J]. 山东大学学报(工学版), 2017, 47(5): 57-63.Chu Zhen-zhong, Zhu Da-qi. Fault-tolerant Control of Autonomous Underwater Vehicle Based on Adaptive Region Tracking[J]. Journal of Shandong University (Engineering Science), 2017, 47(5): 57-63.
[14] Wang Y, Wilson P A, Liu X. Adaptive Neural Network-based Backstepping Fault Tolerant Control for Underwater Vehicles with Thruster Fault[J]. Ocean Engineering, 2015, 110: 15-24.
[15] Hai H, Lei W, Chang W T, et al. A Fault-tolerable Control Scheme for an Open-frame Underwater Vehicle[J]. International Journal of Advanced Robotic Systems, 2014, 11(5): 77.
[16] Ma L, Huang Y, Zhou L, et al. Fault Tolerant Control for a Class of Nonlinear System with Actuator Faults[EB/OL]. (2019-09-12)[2020-10-01]. https://onlinelibrary.wiley.co m/doi/full/10.1002/asjc.2225.
[17] Wang W, Chen Y, Xia Y, et al. A Fault-tolerant Steering Prototype for X-rudder Underwater Vehicles[J]. Sensors, 2020, 20(7): 1816.
[18] Yu Y, Wang H, Li N. Fault-tolerant Control for Over-actuated Hypersonic Reentry Vehicle Subject to Multiple Disturbances and Actuator Faults[J]. Aerospace Science and Technology, 2019, 87: 230-243.
[19] García-Valdovinos L, Salgado-Jiménez T, Bandala- Sánchez M, et al. Modelling, Design and Robust Control of a Remotely Operated Underwater Vehicle[J]. International Journal of Advanced Robotic Systems, 2014, 11(1): 1-16.
[20] Yuh J, Nie J. Application of Non-regressor-based Adaptive Control to Underwater Robots: Experiment[J]. Computer & Electrical Engineering, 2000, 26: 169-179.
Fault-Tolerant Control Method for an Underwater Robot Based on the CAM Matrix
QIU Shuai, LÜ Rui, FAN Hui, WAN Ya-min, HUANG Hai, YANG Guan-jin-zi
(The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China)
The poor control effect of an underwater robot thruster after failure often prevents specific tasks from being completed and may even cause the loss of the robot. To address this problem, this study proposes a fault-tolerant control method for an underwater robot based on a control allocation machine(CAM) thrust distribution matrix. The CAM matrix is used to reconstruct the distribution to ensure stable navigation of the robot, and a thrust distribution strategy for achieving maximum resultant forces is identified using a sequential quadratic programming method. The effectiveness of the proposed method is verified through a simulation. Simulation results show that the proposed fault-tolerant control method can handle partial or complete failure of the thruster and can ensure that the robot achieves good performance and stable navigation.
underwater robot; thrust distribution; fault-tolerant control; reconstruction
TJ630; TP302.8
A
2096-3920(2021)01-0104-07
10.11993/j.issn.2096-3920.2021.01.015
邱帅, 吕瑞, 范辉, 等. 基于CAM矩阵的水下机器人容错控制方法[J]. 水下无人系统学报, 2021, 29(1): 104-110.
2020-10-13;
2020-11-19.
邱 帅(1995-), 男, 在读硕士, 主要研究方向为水下航行器制导技术.
(责任编辑: 许 妍)
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2021年9期)2021-11-02
舰船科学技术(2021年12期)2021-03-29
课堂内外(小学版)(2020年5期)2020-07-20
当代陕西(2018年12期)2018-08-04
天津诗人(2017年2期)2017-11-29
科技创新导报(2016年31期)2017-03-30
科技视界(2016年1期)2016-03-30
