基于马尔科夫的混合动力汽车行驶车速预测研究
2021-03-15 02:35袁焕涛潘广纯仇俊政
智能城市 2021年3期
袁焕涛 赵 红 潘广纯 仇俊政
(青岛大学机电工程学院,山东青岛 266071)
随着对环保和节能需求的提高,许多汽车制造商和研究机构开始研究如何控制汽车的排放和提高发动机及电机的工作效率[1]。新能源汽车和传统内燃机汽车相比较,在能源消耗、环境保护和经济性等方面有着较大的优势,现阶段已经成为最有效的缓解环境污染与能源危机问题的方式之一。插电式混合动力汽车(plug-in hybrid vehicle,PHEV)作为兼备混合动力汽车和新能源汽车优点的新型汽车,在新能源汽车中具有代表性,能够通过联接外部电网进行充电,续航行驶里程高,有较好的燃油经济性,降低了汽车的使用成本。合理的能量管理策略是插电式混合动力汽车的核心部分,决定着整车的动力性、经济性、舒适性及排放性能,是混合动力汽车领域的研究重点之一[2]。当前对于混合动力汽车控制策略的研究主要包括基于简单规则、实时优化和全局优化控制策略以及人工智能的控制方法。基于规则的控制策略是使用广泛并比较成熟的控制策略,往往依据工程经验来提升车辆的性能,而不能实现汽车的燃油经济性最优。全局优化算法在已知循环工况的前提下可以保证整车性能最优,但是算法程序复杂、运算量大,难以实现实时控制[3]。近年来,一些学者发现驾驶循环工况和道路信息在提高车辆燃油经济性方面有重要影响,如果混合动力汽车在行驶过程中能够提起获得未来一段时间内的路况信息,比如汽车行驶状态、车速、加速度、需求转矩等,可以根据这些信息提前制定最佳燃油消耗的能量管理控制策略,即预测控制。BORHAN等[4]认为车辆未来需求转矩按照指数形式衰减,建立了线性的优化控制模型。秦大同等[5]建立了以预测域内能量消耗最小为目标的随机模型预测策略(SMPC),比基于规则控制策略的燃油消耗可减少28.64%。本文根据马尔科夫的无后效性和车辆行驶过程的随机性,分析车辆速度的转移规律,提出马尔科夫原理预测混合动力汽车未来车速状态,进而提出车速预测型能量管理策略。
1 PHEV系统结构
1.1 PHEV整车结构与组成
混合动力汽车由多个动力源提供动力,控制系统根据车辆的行驶状态和动力电池的荷电状态将汽车转换成不同的驱动模式。本文研究对象是插电式并联混合动力汽车,采用同轴并联结构,发动排量为1.5 L的汽油机;峰值功率为32 kW的永磁同步电机,电机转子与发动机的输出轴联接并与变速器的输入轴固定在一起;电机控制器包含电机控制系统和逆变器;动力电池采用三元锂离子电池。混合动力系统结构如图1所示。整车与各零部件的性能参数如表1所示。

图1 PHEV动力系统结构
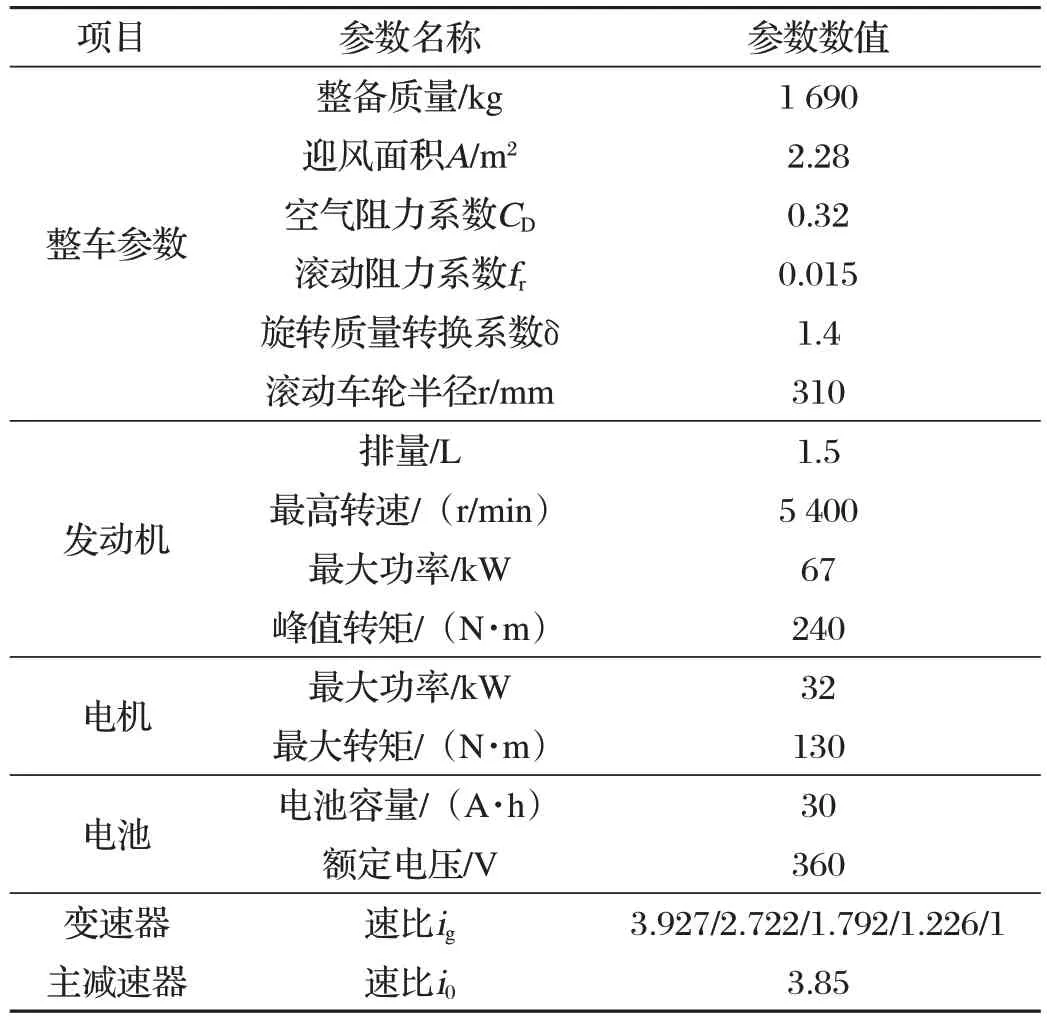
表1 整车与零部件性能参数
1.2 插电式混合动力汽车动力特性
汽车行驶时的驱动力:

式中:Tq——驾驶员的需求转矩(N·m);r——车轮半径(m)。
汽车行驶时,驱动力和行驶阻力相等,即:

式中:g——重力加速度(m/s2);f——滚动阻力系数;m——整车质量(kg);α——坡度角(°);CD——空气阻力系数;A——迎风面积(m2);δ——汽车旋转质量换算系数v——车辆速度(m/s)。
1.3 发动机模型
发动机燃油消耗率为发动机转矩和转速的函数:

1.4 电机模型
电机效率是其转速和转矩的函数:

电机的功率:

式中:ηm——电机效率;Tm——电机转矩;nm——电机转速。
1.5 电池模型
电池的荷电状态(state of charge,SOC)为一个重要变量,将电池物理模型简化为串联内阻的开路电压,忽略温度变化的影响,SOC为:

式中:Q0——电池最大荷电量;U0——电池的开路电压;Rint——电池内阻;Pbatt——电池的充放电功率。
2 马尔科夫预测原理
2.1 马尔科夫过程
马尔科夫过程[6]是在马尔科夫假设基础上形成的描述某动态系统的状态以及状态之间转换的理论。马尔科夫过程可以概述为概率转移矩阵从一种状态到另一种状态的转移过程。假设一个随机过程{X(t),t∈T}的状态空间为S,对任意n≥2,n∈N*;t1>t2>…>tn∈T;X(ti)=xi,xi∈S,i=1,2,3,…,n-1,满足在X(tn)的条件概率分布函数恰好等于在条件X(tn-1)=xn-1下的分布函数,即:

则称此随机过程{X(t),t∈T}为马尔科夫过程。
很多过程都是马尔科夫过程,如液体中微粒的布朗运动、数字通信中的语音和视频信号、森林中动物数量的变化、车站候车人数变化等[7]。按照状态空间E和时间参数集T是连续或离散将马尔科夫过程分为四类,如表2所示。

表2 马尔科夫过程的分类
2.2 马尔科夫链
马尔科夫链的特征为马尔科夫随机过程的时间和状态空间变量都是离散的。在过程或(系统)在时刻t0所处的状态为已知的条件下,时刻t>t0状态条件分布过程在时刻t0之前所处的状态无关的特性称为马尔科夫性或无后效性。未来状态的条件概率分布仅与当前状态有关,与过去的历史状态无关。假设随机过程{Xt,t∈T},在条件Xt=xi,i=1,2,…,n-1下,满足:

则称该随机过程{Xt,t∈T}是马尔科夫链。
3 马尔科夫特性
3.1 速度特征的马尔科夫特性分析
汽车的车速信息是以时间为轨迹在间隔相同时间进行记录的,汽车的行驶过程是一个时间和状态空间变量都离散的过程。假设车辆在每一时刻的速度与历史信息无关,只由当前状态决定,则符合无后效性这一特性,将车辆的速度变化看成是一种马尔科夫过程。为了验证车速的马尔科夫性,本文利用时间间隔为1、5、10 s的车速值转换成散点分布图来直观描述其马尔科夫特性,运用相关系数法来确定不同时间间隔的速度线性相关程度,相关系数的取值越接近1,两个量之间的线性相关程度越高。从所有行驶车速工况中选取连续的车速工况,假设此随机过程{V}的状态空间为E,在状态空间内任意N个数值{v(1),v(2),…,v(N),N≥3}将v(k)分为两个连续的子状态空间{X}、{Y},{X}={v(1),v(2),…,v(Nk)},{Y}={v(k+1),v(k+2),…,v(N)},其中k为车速在两个时间间隔的取值,k=1,2…,N。以{X}为横坐标、{Y}为纵坐标,构建当前时刻车速和下一时刻车速的二维散点分布图,然后对k取不同的值来确定{X}和{Y}之间的相关系数,当k=1时,相关系数绝对值极限接近1,说明下一时刻车速与当前时刻车速具有很大相关性,随着k值取值逐渐增大,相关系数绝对值取值减小,最后趋近0,说明取值时间间隔越大,当前时刻车速和下一时刻车速相关程度越小。
3.2 WLTC循环工况的马尔科夫性验证
为进一步验证该工况的马尔科夫性,分别取该工况间隔1、5、10 s的数据绘制成散点分布图进行马尔科夫性分析。先取车速的取值间隔为1 s,可以看出当前时刻行驶车速和下一时刻车速高度线性相关,证明v(k)和v(k+1)有很强的相关性。当车速的取值时间间隔等于5 s时,v(k)和v(k+5)的相关性开始失控,有一部分散点已经偏离,线性关系开始变差。车速取值时间间隔等于10 s时,v(k)和v(k+10)已经无相关性,数据呈现发散状态。可以发现随着车速取值时间间隔的增大,当前时刻和下一时刻的行驶车速状态逐渐趋向不相关,说明汽车未来的行驶状态只与当前行驶状态有关,和汽车的历史行驶状态无关,因此WLTC循环工况满足马尔科夫无后效性。若可以把时间间隔取值更小,当前时刻和下一时刻更为接近,行驶车速具有更高的相关性,能更充分证明WLTC循环工况的马尔科夫性。WLTC循环测试工况曲线如图2所示,间隔1、5、10 s的行驶车速相关性如图3所示。

图2 WLTC循环测试工况
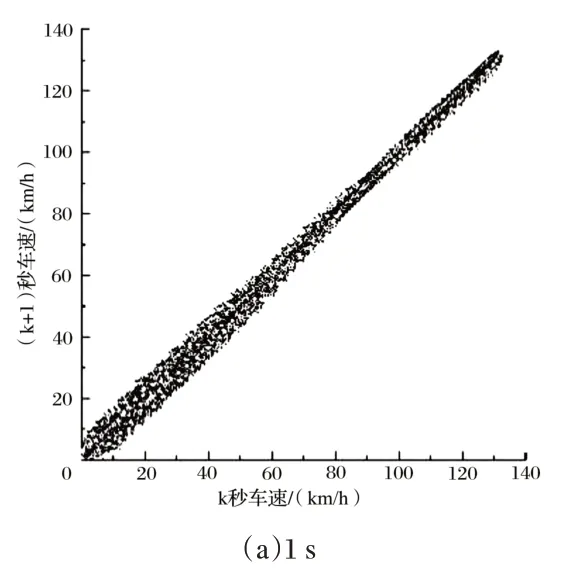
图3 WLTC工况下间隔1、5、10 s的行驶车速相关性
4 状态转移概率求解
本文选择汽车行驶车速作为预测量,在WLTC循环工况下,采用马尔科夫链模型对汽车进行预测[8]。计算状态转移概率矩阵,利用近邻法将行驶车速离散为有限的数值:

将行驶过程的车速划分为100个可能的状态,速度离散间隔取值5 km/h,行驶车速状态编号U=1,2,…,25,汽车行驶的车速由当前车速状态Ui到下一时刻的车速状态Uj的概率为状态转移概率Pi,j。在当前时刻行驶车速为vi时,下一时刻行驶车速为vj的概率为:

式中:Pi,j——状态转移概率矩阵的第i行第j列元素,并满足Pi,j≥0,=1,j=0,1,…,N。
Pi,j的值可以通过最大似然估计法求得:

式中:Fi,j——行驶车速从vi转移到vj的次数;Fi——行驶车速从vi转移的总次数;i,j=0,1,…,N。
计算当前行驶车速到下一行驶车速的转移概率和次数,将每个状态概率值进行组合生成马尔科夫转移概率矩阵P。

假设系统有n个相互独立的行驶车速状态,系统的初始车速状态向量为:

式中:Sm(0)——车速状态m时的初始概率。经过k步状态转移,系统在车速状态m的概率为Sm(k),那经过状态转移后的状态向量为:

式中:Sm(k)——系统在k时刻处于状态m的概率[9]。
马尔科夫预测模型可表示为:

基于马尔科夫链预测模型和状态转移矩阵的求解,利用MATLAB/Markov工具箱对行驶实时预测,预测速度值:

式中:v(k)——k时刻的车辆行驶车速;Uk——k时刻的行驶车速状态;d——速度状态划分长度,取值为5;r——k时刻MATLAB产生的均匀分布随机数。
选取上述的WLTC循环测试工况进行预测,用三维条形图来描述行驶车速的状态转移规律。分析可得,行驶车速的一步转移概率基本沿着对角线分布,表示当前时刻车速和下一时刻车速差距较小,但随着预测步长的增加,转移概率的对角线特征和分布规律越不明显,转移概率的随机性越来越大,分布越分散,从而未来行驶车速状态具有很大的不确定性。WLTC测试工况1步、3步、10步转移概率如图4所示。

图4 WLTC测试工况1步、3步、10步转移概率
行驶车速预测步长为3 s的车速曲线如图5所示。
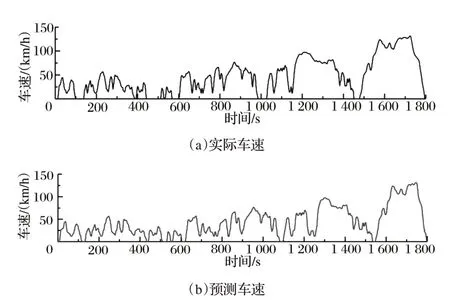
图5 WLTC测试工况行驶预测车速对比曲线
分析可知,预测车辆速度和实际工况下的车速相对比,误差控制在合理范围内,平均车速误差在此步长下不超过0.72%,说明预测车速能较好地跟随实际车速。
5 车速预测型能量管理策略及仿真分析
5.1 预测型能量管理策略
汽车在连续行驶过程中,行驶车速状态可进行离散化处理,系统内部转移概率只和当前状态有关[10]。基于预测的车辆行驶速度,在预测区间内实施预测控制算法在线进行功率分配实时优化,则系统控制模型可表示为:

式中:x——状态变量,以SOC表示;u——系统控制量,以电动机转矩Tm表示;v——观测输入量,以车速v表示;y——模型输出量,以Pbatt、Te、Tm表示。
状态变量和控制变量的约束条件为:

式中:下标*_min和*_max——对应项的上下限值。
在循环工况最优控制模型中寻找最佳燃油经济性和SOC限值内的最优控制变量u*(k),i为预测时域,则:

5.2 仿真分析
为验证车速预测型能量管理策略的有效性,在MATLAB软件中进行仿真。为使系统控制更为稳定,设置采样间隔为1 s,预测时域为3 s,电池SOC初始值设定为60%,WLTC工况下的仿真结果如图6~图11所示。
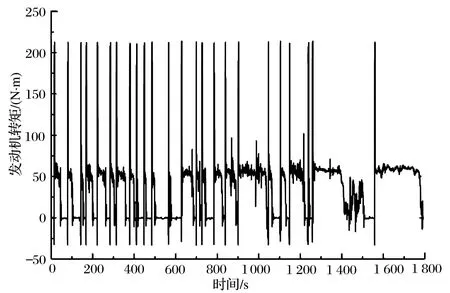
图6 发动机转矩曲线

图7 电机转矩曲线
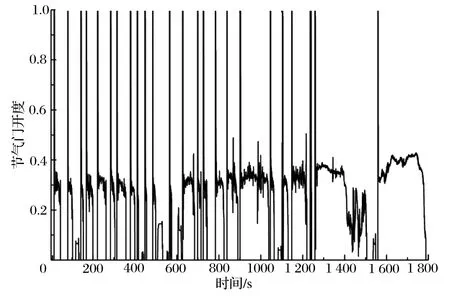
图8 节气门开度曲线

图9 燃油消耗率曲线
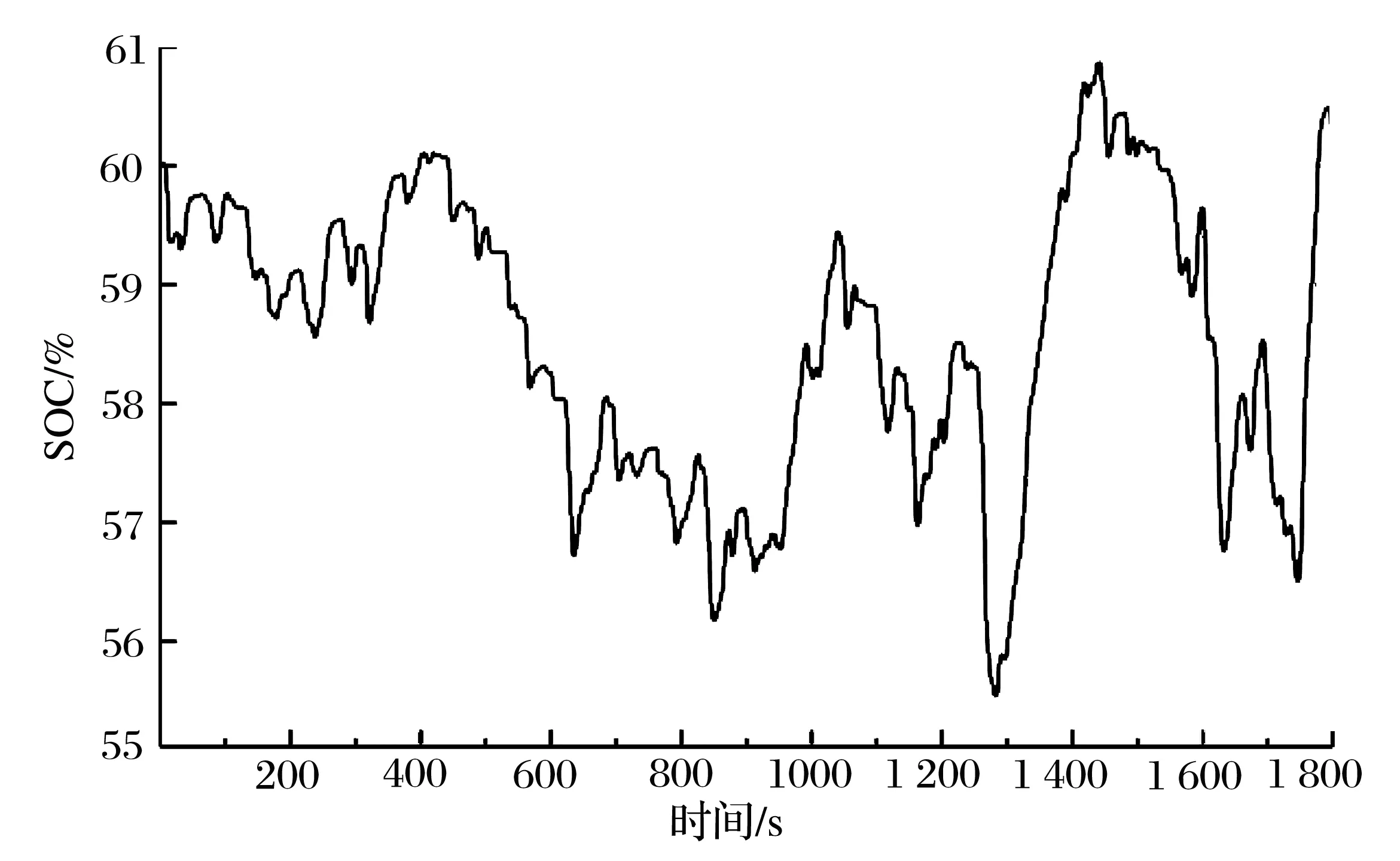
图10 SOC变化曲线
由图6~9可知,在汽车刚启动很短的一段时间内,发动机输出转矩和节气门开度都比较小,处于低工作效率区域,此时驱动力由电机提供;当汽车加速到一定速度此时电机最大输出转矩不能满足动力需求,发动机和电机将耦合转矩提供驱动力。由马尔科夫链模型预测得到的预测车速和实际行驶车速对比可知二者曲线基本一致,根据图9和图10可知车辆的燃油消耗变化规律平稳,电池SOC最开始变化比较稳定,由于WLTC工况怠速所占比例小,混合动力汽车的耗电量将会增加,所以中间变化稍剧烈,但总体能维持在0.58上下波动,说明能量管理策略在满足车辆动力需求情况下,能维持电池荷电状态。由图11可以看出在WLTC工况下汽车前期一直消耗电池电量,后期再生制动回收的能量较少,SOC不能维持稳定。对比可知车速预测型能量管理策略在SOC方面具有较好的稳定性和控制性。基于规则能量管理策略,燃油消耗为6.50 L/100 km;车速预测型能量管理策略,燃油消耗为5.84 L/100 km,经济性提高了10.15%。

图11 基于规则的SOC变化
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30
数学小灵通(1-2年级)(2020年11期)2020-12-28
资源导刊(信息化测绘)(2020年5期)2020-06-22
小学生学习指导(低年级)(2019年3期)2019-04-22
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10
汽车维护与修理(2015年5期)2015-02-28
读写算·小学低年级(2014年4期)2014-07-24